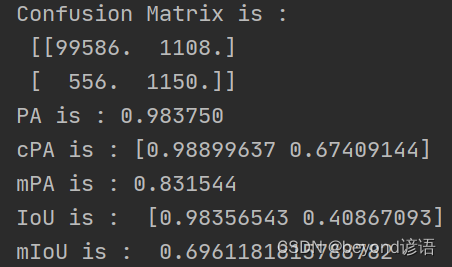
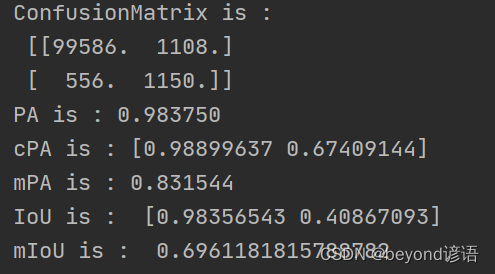
当训练好模型之后,检测模型训练效果如何,评价指标有哪些?通过查阅相关资料,我将以这五个指标来对所训练的模型进行评估,下图是评价指标运行结果图。
一、混淆矩阵(Confusion Matrix)
解释:也就是个n维矩阵,n表示分类的类别数。
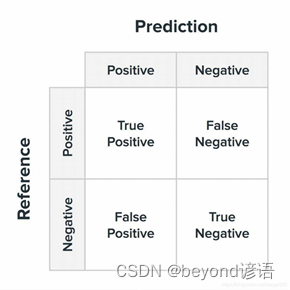
具体的表示如下(这里以二分类任务为例):也就是图中的二维矩阵
上述的所有指标都是建立在混淆矩阵的基础上进行计算的
我这里以织物毛球和纹理进行识别,毛球为Positive,纹理为Negative
这个二维矩阵有四个参数:
| 参数 | 解释 |
|---|---|
| True Positive | 模型预测识别为Positive,识别正确True;实际为Positive |
| False Negative | 模型预测识别为Negative,识别错误False;实际为Positive |
| False Positive | 模型预测识别为Positive,识别错误False;实际为Negative |
| True Negative | 模型预测识别为Negative,识别正确True;实际为Negative |
这些值对测试图像中所有像素点进行分类统计
代码实现:
修改:SegmentationMetric(2)改成实际训练模型的分类数,我这个模型训练的是二分类任务
imgPredict和imgLabel 改成自己模型预测的图像和标签图像的路径
实际上,imgLabel为正确答案,依次遍历imgPredict中像素点,与正确答案进行对比,统计上述参数的个数,最后绘制成混淆矩阵。
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
= cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
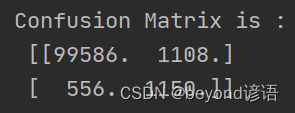
print('ConfusionMatrix is :\n', ConfusionMatrix)
运行结果如下:
二、像素准确率PA(Pixel Accuracy)
PA最后的输出是一个数值,因为是,无论多少类别的分类,都是跟标准标签进行对比,一致就是True,不一致就是False
PA,别的论文也称为准确率、Acc等,都指的是像素准确率
Accuracy = (TP + TN) / (TP + TN + FP + FN),也就是对角线元素之和/总的元素之和
(99586+1150)/(99586+1108+556+1150)= 0.983750,这也对应了第一张图的显示结果
代码实现:
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def pixelAccuracy(self):
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
PixelAccuracy = metric.pixelAccuracy()
print('PixelAccuracy is :\n', PixelAccuracy)
运行结果如下:

三、类别像素准确率CPA(Class Pixel Accuracy)
CPA与PA不同,PA是将整体区分True和False最后结果是一个数值
CPA则先将不同的类别进行划分,每个类别再分别与标签给定的正确答案进行对比统计,最后的个数是类别个数,有几个类别就是几个数值。
代码实现:
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def classPixelAccuracy(self):
classAcc = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=1)
return classAcc # 返回的是一个列表值,如:[0.90, 0.80, 0.96],表示类别1 2 3各类别的预测准确率
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
cpa = metric.classPixelAccuracy()
print('classPixelAccuracy is :\n', cpa)
因为是二分类任务,故分别显示这两个类别的PA值
运行效果如下:

四、类别平均像素准确率MPA(Mean class Pixel Accuracy)
也就是将所有的CPA加一块,求个平均值
代码实现:
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def classPixelAccuracy(self):
classAcc = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=1)
return classAcc # 返回的是一个列表值,如:[0.90, 0.80, 0.96],表示类别1 2 3各类别的预测准确率
def meanPixelAccuracy(self):
classAcc = self.classPixelAccuracy()
meanAcc = np.nanmean(classAcc) # np.nanmean 求平均值,nan表示遇到Nan类型,其值取为0
return meanAcc # 返回单个值,如:np.nanmean([0.90, 0.80, 0.96, nan, nan]) = (0.90 + 0.80 + 0.96) / 3 = 0.89
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
mpa = metric.meanPixelAccuracy()
print('meanPixelAccuracy is :\n', mpa)
(0.98899637+0.67409144)/ 2 = 0.831543905
运行结果如下:

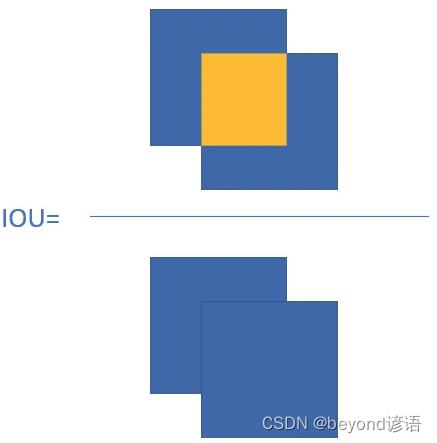
五、交并比IoU(Intersection Over Union)
通俗来说:将标签图像和模型预测出的图像重叠一下,分别取交集和并集,这里的交集和并集取得是统计像素点的个数
IoU是按不同类别分别进行求解的,几个类别就有几个IoU
IoU = 交集 / 并集
代码实现:
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def pixelAccuracy(self):
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
def IntersectionOverUnion(self):
# Intersection = TP Union = TP + FP + FN
# IoU = TP / (TP + FP + FN)
intersection = np.diag(self.confusionMatrix) # 取对角元素的值,返回列表
union = np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) - np.diag(
self.confusionMatrix) # axis = 1表示混淆矩阵行的值,返回列表; axis = 0表示取混淆矩阵列的值,返回列表
IoU = intersection / union # 返回列表,其值为各个类别的IoU
return IoU
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
IoU = metric.IntersectionOverUnion()
print('IntersectionOverUnion is :\n', IoU)
效果图如下:

六、平均交并比MIoU(Mean Intersection Over Union)
将不同类别的IoU求个平均数
代码实现:
import numpy as np
import cv2
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def genConfusionMatrix(self, imgPredict, imgLabel):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def pixelAccuracy(self):
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
def IntersectionOverUnion(self):
# Intersection = TP Union = TP + FP + FN
# IoU = TP / (TP + FP + FN)
intersection = np.diag(self.confusionMatrix) # 取对角元素的值,返回列表
union = np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) - np.diag(
self.confusionMatrix) # axis = 1表示混淆矩阵行的值,返回列表; axis = 0表示取混淆矩阵列的值,返回列表
IoU = intersection / union # 返回列表,其值为各个类别的IoU
return IoU
def meanIntersectionOverUnion(self):
mIoU = np.nanmean(self.IntersectionOverUnion()) # 求各类别IoU的平均
return mIoU
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
metric = SegmentationMetric(2) # 2表示有2个分类
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
mIoU = metric.meanIntersectionOverUnion()
print('meanIntersectionOverUnion is :\n', mIoU)
运行结果如下:

七、完整代码
import numpy as np
import cv2
__all__ = ['SegmentationMetric']
"""
confusionMetric # 注意:此处横着代表预测值,竖着代表真实值
P\L P N
P TP FP
N FN TN
"""
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,) * 2) # 混淆矩阵(空)
def pixelAccuracy(self):
# return all class overall pixel accuracy 正确的像素占总像素的比例
# PA = acc = (TP + TN) / (TP + TN + FP + TN)
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
def classPixelAccuracy(self):
# return each category pixel accuracy(A more accurate way to call it precision)
# acc = (TP) / TP + FP
classAcc = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=1)
return classAcc # 返回的是一个列表值,如:[0.90, 0.80, 0.96],表示类别1 2 3各类别的预测准确率
def meanPixelAccuracy(self):
"""
Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。
:return:
"""
classAcc = self.classPixelAccuracy()
meanAcc = np.nanmean(classAcc) # np.nanmean 求平均值,nan表示遇到Nan类型,其值取为0
return meanAcc # 返回单个值,如:np.nanmean([0.90, 0.80, 0.96, nan, nan]) = (0.90 + 0.80 + 0.96) / 3 = 0.89
def IntersectionOverUnion(self):
# Intersection = TP Union = TP + FP + FN
# IoU = TP / (TP + FP + FN)
intersection = np.diag(self.confusionMatrix) # 取对角元素的值,返回列表
union = np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) - np.diag(
self.confusionMatrix) # axis = 1表示混淆矩阵行的值,返回列表; axis = 0表示取混淆矩阵列的值,返回列表
IoU = intersection / union # 返回列表,其值为各个类别的IoU
return IoU
def meanIntersectionOverUnion(self):
mIoU = np.nanmean(self.IntersectionOverUnion()) # 求各类别IoU的平均
return mIoU
def genConfusionMatrix(self, imgPredict, imgLabel): #
"""
同FCN中score.py的fast_hist()函数,计算混淆矩阵
:param imgPredict:
:param imgLabel:
:return: 混淆矩阵
"""
# remove classes from unlabeled pixels in gt image and predict
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass ** 2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
# print(confusionMatrix)
return confusionMatrix
def Frequency_Weighted_Intersection_over_Union(self):
"""
FWIoU,频权交并比:为MIoU的一种提升,这种方法根据每个类出现的频率为其设置权重。
FWIOU = [(TP+FN)/(TP+FP+TN+FN)] *[TP / (TP + FP + FN)]
"""
freq = np.sum(self.confusion_matrix, axis=1) / np.sum(self.confusion_matrix)
iu = np.diag(self.confusion_matrix) / (
np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -
np.diag(self.confusion_matrix))
FWIoU = (freq[freq > 0] * iu[freq > 0]).sum()
return FWIoU
def addBatch(self, imgPredict, imgLabel):
assert imgPredict.shape == imgLabel.shape
self.confusionMatrix += self.genConfusionMatrix(imgPredict, imgLabel) # 得到混淆矩阵
return self.confusionMatrix
def reset(self):
self.confusionMatrix = np.zeros((self.numClass, self.numClass))
# 测试内容
if __name__ == '__main__':
imgPredict = cv2.imread("../result/qqq.png")
imgLabel = cv2.imread("../result/img.jpg")
#"../result/standard/mask/SM50GRADE1PLAIN(1).jpg"
#"../result/predict/image/SM50GRADE1BLANKET(1).jpg"
imgPredict = np.array(cv2.cvtColor(imgPredict, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
imgLabel = np.array(cv2.cvtColor(imgLabel, cv2.COLOR_BGR2GRAY) / 255., dtype=np.uint8)
# imgPredict = np.array([0, 0, 1, 1, 2, 2]) # 可直接换成预测图片
# imgLabel = np.array([0, 0, 1, 1, 2, 2]) # 可直接换成标注图片
metric = SegmentationMetric(2) # 2表示有2个分类,有几个分类就填几
ConfusionMatrix = metric.addBatch(imgPredict, imgLabel)
pa = metric.pixelAccuracy()
cpa = metric.classPixelAccuracy()
mpa = metric.meanPixelAccuracy()
IoU = metric.IntersectionOverUnion()
mIoU = metric.meanIntersectionOverUnion()
print('ConfusionMatrix is :\n', ConfusionMatrix)
print('PA is : %f' % pa)
print('cPA is :', cpa)
print('mPA is : %f' % mpa)
print('IoU is : ', IoU)
print('mIoU is : ', mIoU)
效果图如下:

![[carla] GNSS传感器与Carla坐标系 转换方法](https://img-blog.csdnimg.cn/a21b45652631446492992a23aa20880b.png)