仿真:
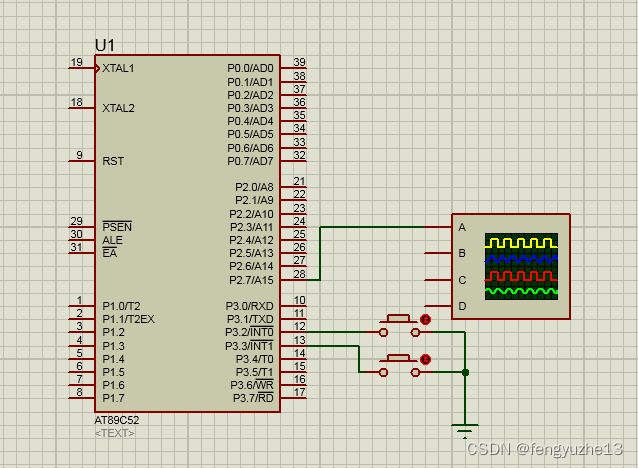

//开发板按钮K3和K4,舵机信号线P27
//程序为12m晶振,开发板为11.0592M
#include"reg52.h"
#define u8 unsigned char
#define u16 unsigned int
sbit P27=P2^7;//舵机信号线
sbit K3=P3^2; //正偏转
sbit K4=P3^3; //反偏转
u8 Flag;
u16 T, PWM, Temp;//T为控制周期,PWM为高电平长度
void delay(unsigned int t)
{
unsigned int i,j;
for(i=0;i<t;i++)
for(j=0;j<50;j++);
}
void Button()
{
if(K3==0){
if(PWM<2500) PWM=PWM+10;
}
if(K4==0){
if(PWM>500) PWM=PWM-10;
}
}
void main()
{
TMOD=0x01; //使用定时器T0的模式1
EA=1; //开总中断
ET0=1; //定时器T0中断允许
T=20000; //周期为20ms
PWM=1500; //高电平1.5ms
Temp=65536-(T-PWM); //低电平
TH0=Temp>>8; //定时器T0的高8位赋初值
TL0=Temp; //定时器T0的高8位赋初值
TR0=1; //启动定时器T0
P27=0;
Flag=0;
while(1)//千万不要在主函数中对PWM进行连续修改,不然舵机运行不稳定!
{
delay(4);
}
}
/**************************************************************
函数功能:定时器T0的中断服务程序
**************************************************************/
void Time0(void) interrupt 1 using 0 //“interrupt”声明函数为中断服务函数 //其后的1为定时器T0的中断编号;0表示使用第0组工作寄存器
{
Button();//判断按键状态,并修改PWM值
if(Flag==0)
Temp=65536-PWM;//高电平
else
Temp=65536-(T-PWM); //低电平
TH0=Temp>>8; //定时器T0的高8位赋初值
TL0=Temp; //定时器T0的高8位赋初值
P27=~P27;
Flag=~Flag;
TR0=1; //启动定时器T0
}