本文编辑:调皮哥的小助理
本文引用了CSDN雷达博主@XXXiaojie的文章源码(https://blog.csdn.net/Xiao_Jie1),加以修改和注释,全面地、详细地阐述了FMCW TDM-MIMO毫米波雷达的工作原理,同时配套MATLA仿真实现方法,非常适合于雷达刚入门的同学参考学习,并引导大家基于TDMA-MIMO扩展到DDMA-MIMO,进而在宏观上认识雷达,从微观上掌握雷达,形成雷达学习过程中战略与战术的统一。
本文尤其感谢CSDN雷达博主@XXXiaojie在雷达领域贡献的技术文章,帮助了很多人。XXXiaojie是桂林电子科技大学的硕士研究生,本专业不是雷达,而是从计算机专业转到雷达这边的,其代码的阅读和分析能力非常强,对于TI毫米波雷达架构和原理的理解也是十分到位的,感兴趣的朋友可以搜索他的CSDN文章,XXXiaojie博主也在雷达技术交流【1】群中,感兴趣可以相互交流。
立足于本文,雷达初学者下可掌握雷达基本原理,上可继续在本文的基础之上扩展DDMA或其他调制波形(只需修改发射信号模型即可),以及聚类、跟踪等雷达数据处理,甚至是雷达通信一体化(通感一体化)等算法的仿真。在本文分享的MATLAB仿真代码程序中会引出如何生成多帧的雷达数据,用于后续的雷达数据处理。
然而,雷达信号处理和数据处理的理论远远不止限于此,但雷达的科普一直持续在入门阶段,我们不能只停留在这里,因此本文算是雷达入门科普的一个闭环文章,以后希望随着我个人见闻的增加,能够分享更加有深度的雷达科普内容。
〇、基础知识介绍
1、FMCW叫做调频连续波,调频连续波有步进调频连续波(SFMCW)、线性调频连续波(LFMCW),以及其他非线性调频连续波。LFMCW有锯齿波和三角波等等;锯齿波有恒定调制周期的锯齿波和非恒定周期的锯齿波。关于FMCW雷达目标检测的基本原理可以参考Tide官方文档:Introduction to mmwave sensing:FMCW radars.pdf和The fundamentals of millimeter wave sensors。
2、MIMO是多输入多输出(Multiple input Multiple output),也就是多发多收。关于MIMO的基本原理可以参考TI的官方文档:MIMO radar.pdf
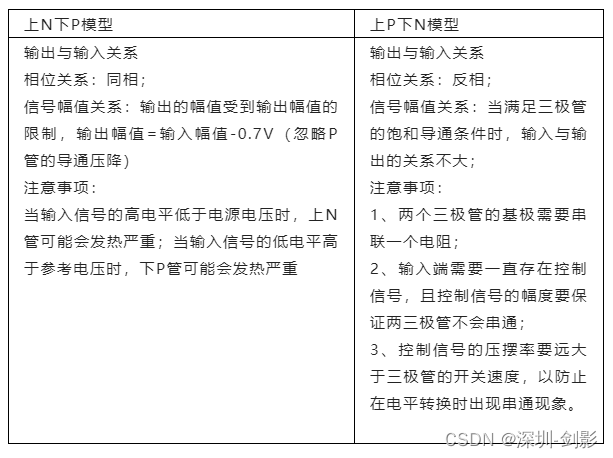
TDM-MIMO也就是时分复用的多发多收,也称为TDMA-MIMO。DDMA-MIMO是多普勒多通道分离的多发多收。除了TDMA、DDMA外,还有CDMA等MIMO发射波形,总结如下表:

(图来自参考论文[1])
TDM-MIMO也就是多个发射天线分时间轮流发射信号,但每个发射信号之间信号模型都是一样的;但DDMA是多个天线同时发射信号,每个发射信号之间的初始相位是按照chirp数和发射天线数量变化的。具体关于DDMA的原理可以参考TI官方文档:基于AWR2944的汽车雷达DDMA波形的原理和实现.pdf。
上述文章是本文的基本理论基础,如果还要更加深层次了解雷达的基本原理,那么推荐看下面这两篇文章:
1.调皮连续波:雷达入门系列文章(3)| 毫米波雷达信号处理入门教程
2.调皮连续波:雷达原理 | 用MATLAB信号处理是如何解算目标的距离和速度信息的?
好了,理论研究得差不多了,那么我们就开始讲仿真吧。
一、总结概述
本文的仿真流程主要如下所示:
1、雷达参数生成;
2、信号模型构建;
3、IQ通道校正;
4、雷达信号处理之距离估计(1D-FFT);
5、雷达信号处理之速度估计(2D-FFT);
6、雷达信号处理之角度估计(3D-FFT);
7、多通道间的非相干积累;
8、CFAR检测;
9、峰值检索;
10、多普勒补偿
11、DOA估计。
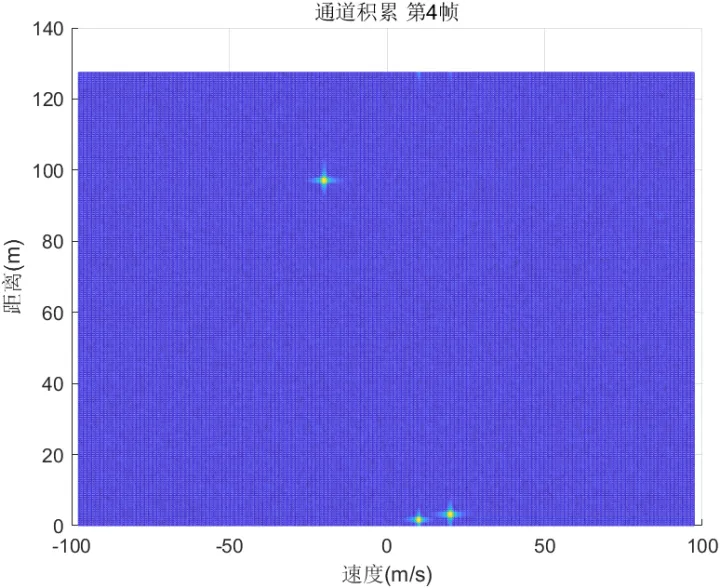
上述过程可以采用多帧重复运行,连续多帧多目标运动的演示效果如下所示:

二、雷达参数设置
雷达参数设置包括雷达波形参数设计、目标参数设计、射频前端参数选择等等,这些参数都是可以任意修改的,也就是可以随着雷达系统设计人员的需求而尽情发挥,并不只是限于本文。比如77G可以修改为24G或者35G,原理都是相通的,只是频段不同。
其中,需要注意采样点数与采样时间、采样率之间的匹配关系,修改的时候要匹配好,不然会错先错误。同样,雷达探测的最大距离、最大不模糊速度也要设置好,否则,如果没有特别的算法来解决,那就会和预想的结果不一样。
parameter.c = 3e8; %光速
parameter.stratFreq = 76.5e9; %起始频率
parameter.Tr = 10e-6; %扫频时间 也就是周期
parameter.Samples = 256; %采样点
parameter.Fs = 25.6e6; %采样率
parameter.rangeBin = parameter.Samples ; %rangebin
parameter.Chirps = 512; %chirp数
parameter.dopplerBin = parameter.Chirps; %dopplerbin
parameter.Slope = 30e12; %chirp斜率
parameter.Bandwidth = parameter.Slope * parameter.Tr ; %发射信号有效带宽
parameter.BandwidthValid = parameter.Samples/parameter.Fs*parameter.Slope; %发射信号带宽
parameter.centerFreq = parameter.stratFreq + parameter.Bandwidth / 2; %中心频率
parameter.lambda = parameter.c / parameter.centerFreq; %波长
parameter.txAntenna = ones(1,3); %发射天线个数
parameter.rxAntenna = ones(1,4); %接收天线个数
parameter.txNum = length(parameter.txAntenna);
parameter.rxNum = length(parameter.rxAntenna);
parameter.virtualAntenna = length(parameter.txAntenna) * length(parameter.rxAntenna);
parameter.dz = parameter.lambda / 2; %接收天线俯仰间距
parameter.dx = parameter.lambda / 2; %接收天线水平间距
parameter.doaMethod = 2; %测角方法选择 1-dbf 2-fft 3-capon
parameter.target = [
100 -20 0; %target1 range speed angle
0 10 -30; %target2 range speed angle
0 20 30; %target2 range speed angle
];
设置雷达参数这部分内容就是属于雷达系统设计了,客户或者我们自己需要设计一个什么样的雷达,满足什么样的指标需求,所涉及到的参数都在这里设置好,因此这些参数完全可以按照我们的想法设计。比如雷达的收发天线可以设计为单发单收、单发多收、多发多收(如12T16R)。
上述代码中,我们设置了三个目标,如同在上述gif动图中见到的那样,目标的速度、距离需要符合实际。如果有同学需要生成许多点云,那就可以把目标的个数搞多一点,还可以加上测量俯仰角的天线,模拟人体三维点云。
TDM-MIMO信号模型
根据之前设置好的雷达系统参数,在这里就可以生成发射信号模型、接收信号模型、混频,以及中频信号模型。
发射信号模型(复信号形式):
s t ( t ) = exp { 2 π ( f 0 t + u t 2 / 2 ) + ϕ 0 } , t ∈ [ 0 , T r ] s_t(t)=\exp \left\{2 \pi\left(f_0 t+u t^2 / 2\right)+\phi_0\right\}, \quad t \in\left[0, T_r\right] st(t)=exp{2π(f0t+ut2/2)+ϕ0},t∈[0,Tr]
在这个程序中的信号是按照天线和脉冲依次生成的,所以下面的代码和上述的公式的写法有些不同,这个要明白。
St = exp((1i2pi)(centerFreq(t+( chirpId-1)Tr)+slope/2t.^2)); %发射信号
接收信号模型:
S
r
(
t
)
=
K
exp
{
2
π
[
f
0
(
t
−
τ
)
+
u
(
t
−
τ
)
2
/
2
]
+
ϕ
0
}
,
t
∈
[
0
,
T
r
]
S_r(t)=K \exp \left\{2 \pi\left[f_0(t-\tau)+u(t-\tau)^2 / 2\right]+\phi_0\right\}, t \in\left[0, T_r\right]
Sr(t)=Kexp{2π[f0(t−τ)+u(t−τ)2/2]+ϕ0},t∈[0,Tr]
Sr = 10exp((1i2pi)((centerFreq-fd)(t-tau+( chirpId-1) * Tr)+slope/2(t-tau).^2 + wx)); %回波信号
在程序中,增加了不同天线的相位差项。以后不管是运动目标还是静止目标,信号模型都统一写为一个,其中静止目标只是速度为零罢了。如下列代码中targetSpeed =0。而当遇到多目标时,直接对接收信号求和即可。
tau=2*(targetRange+targetSpeed*(txId-1)*Tr)/c;
然后可以增加点噪声:
Sif=awgn(Sif,20);%叠加20dB高斯白噪声
生成信号模型的代码如下,这里的信号模型也就是指后续处理需要的数据,其中在目标参数方面我修改了一些,主要是让多帧连续运动的目标看起来更贴近实际运动。比如说,不能让两个速度不同的目标,看起来跑的一样快,再者目标原理雷达和靠近雷达的速度方向是不同的,一般在连续波雷达中目标靠近雷达是速度是负的,而远离雷达目标速度是正的,这有点违反了人的直觉,但实事就是如此。关于这个现象的解释,我在这里做了个人的分析:
调皮连续波:雷达原理 | 讨论调频连续波雷达目标运动方向与速度正负的关系?
t = 0:1/fs:Tr-(1/fs); %chirp采样的时间序列
for chirpId = 1:chirps
for txId = 1:txNum
St = exp((1i*2*pi)*(centerFreq*(t+( chirpId-1)*Tr)+slope/2*t.^2)); %发射信号
for rxId = 1:rxNum
Sif = zeros(1,rangeBin);
for targetId = 1:targetNum
%%连续帧 目标设置,如果不需要连续帧,令Parameter.frame=0,即可。
if targetId==1
targetRange = target(targetId,1)-Parameter.frame;
targetSpeed = target(targetId,2);
targetAngle = target(targetId,3);
elseif targetId==2
targetRange = target(targetId,1)+0.5*Parameter.frame;
targetSpeed = target(targetId,2);
targetAngle = target(targetId,3);
elseif targetId==3
targetRange = target(targetId,1)+Parameter.frame;
targetSpeed = target(targetId,2);
targetAngle = target(targetId,3);
end
tau = 2 * (targetRange + targetSpeed * (txId - 1) * Tr) / c;
fd = 2 * targetSpeed / lambda;
wx = ((txId-1) * rxNum + rxId) / lambda * dx * sind(targetAngle);
Sr = 10*exp((1i*2*pi)*((centerFreq-fd)*(t-tau+( chirpId-1) * Tr)+slope/2*(t-tau).^2 + wx)); %回波信号
Sif = Sif + St .* conj(Sr);
%叠加20dB高斯白噪声
Sif = awgn(Sif,20);
end
rawData((txId-1) * rxNum + rxId,:,chirpId) = Sif;
end
end
end
三、回波信号分析
回波信号分析这里,我们其实可以假设,原始数据就是来自雷达射频前端,经过混频器、带通或者低通滤波器,然后被ADC正交采样。雷达其实可以采用正交采样(复采样),也可以采用实采样,二者各自有优缺点,选择什么却决于雷达系统设计人员的设计,以及实际的需求,但本文还是选择正交采样。关于这点,可以看这篇文章:
调皮连续波:FMCW雷达系统中的复基带架构(中英文翻译对照)
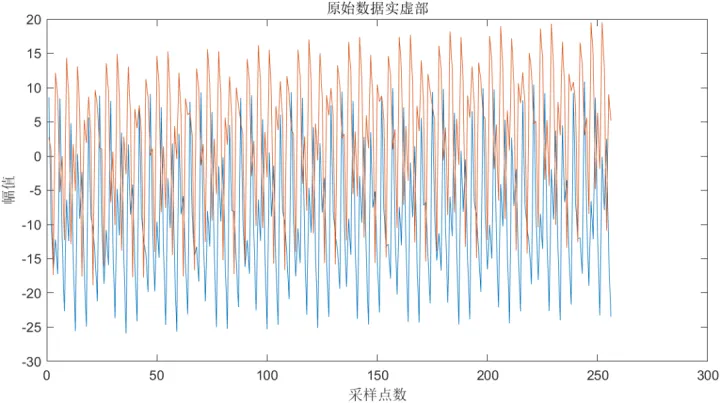
这里我们采用一个chirp来验证我们的想法,假设接收到的信号是IQ不平衡的,我们拆分IQ的实数部分和虚数部分,然后把实数部分增加幅度因子和相位因子,人为使得IQ不平衡。
%% IQ通道校正
firstChirp_I = imag(firstChirp);
firstChirp_Q = real(firstChirp);
%设定幅度误差因子
alpha = 2;
%设定相位误差因子
phi = 5;
firstChirp_Q_1 = (alpha+1)firstChirp_Qexp(phi2pi/360);
然后采用IQ不平衡补偿算法来修正,具体的算法原理可以看这篇文章:
调皮连续波:雷达信号处理中I/Q正交信号不平衡补偿算法(含matlab代码)(文章中有个公式和代码写错了,注意区分,在本文中的代码修改过来了)。本文一谈到原理,我就叫大家去看别的文章,其实很多基础知识之前都分享个人的见解,在这里方便引用,就不再重复说了。
%% IQ通道不平衡 效果
firstChirp_IQ_1 = complex(firstChirp_Q_1,firstChirp_I);
%IQ通道校正算法
%求均值
firstChirp_I = imag(firstChirp_IQ_1);
firstChirp_Q = real(firstChirp_IQ_1);
I_before_correction =firstChirp_I-mean(firstChirp_I);
Q_before_correction=firstChirp_Q -mean(firstChirp_Q);
%估计参数
alphi = sqrt(mean(Q_before_correction.*Q_before_correction)/mean(I_before_correction.*I_before_correction))-1;
phi = -asin(mean(I_before_correction.*Q_before_correction)/sqrt(mean(I_before_correction.*I_before_correction)*mean(Q_before_correction.Q_before_correction)));
%P矩阵求解
P = [1,0;tan(phi),1/((1+alphi)cos(phi))];
%计算IQ
IQ = P[I_before_correction;Q_before_correction];
%重组信号
I =IQ(1,:);
Q =IQ(2,:);
signal_IQ =Q+I1j;
%图形绘制
% figure(2)
% subplot(2,1,1);
% plot((abs(fft(firstChirp_IQ_1))));
% xlabel(‘距离(m)’); ylabel(‘幅值’);title(‘距离维FFT(校正前)’);
% subplot(2,1,2);
% plot((abs(fft(signal_IQ))));
% xlabel(‘距离(m)’); ylabel(‘幅值’);title(‘距离维FFT(校正后)’);
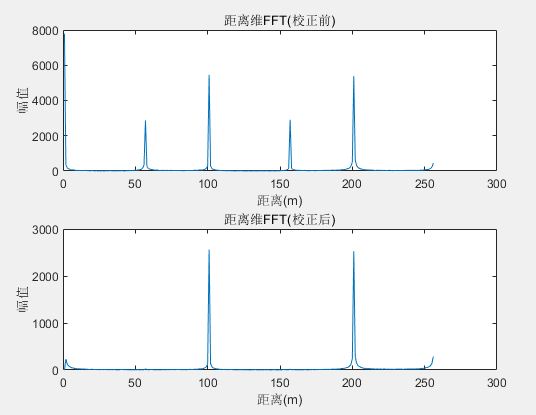
IQ补偿前后的效果如下图所示,可见镜像频率还是很明显的,抑制后频谱干净了许多。本文采取的是窄带IQ不平衡补偿,因为中频信号的带宽比较窄,如果是换做通信系统中,则是需要宽带IQ不平衡补偿算法,那时会采取一种滤波器组的方法实现。
时域信号如下:
四、距离估计
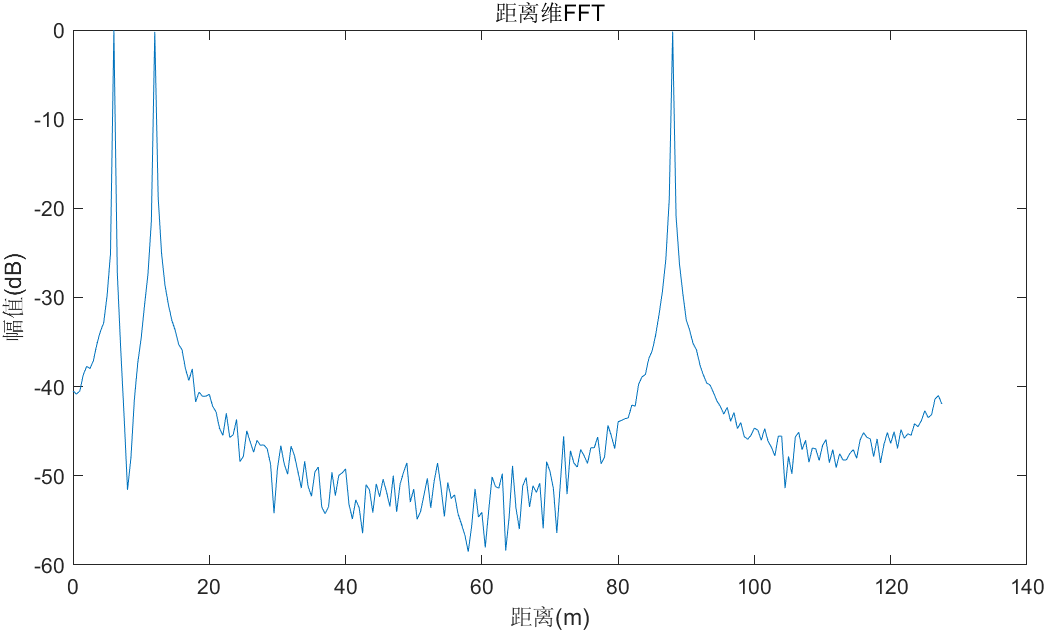
现在要解算目标的距离了,原理很简单,之前的文章看过就清楚了,无非就是对一个chirp内的中频信号做一次FFT,这里以单个chirp为例子说明:
%%1D FFT
fft1dData = fft(firstChirp);
% figure(3);
% plot(rangeIndex,db(abs(fft1dData)./max(abs(fft1dData))));
% xlabel(‘距离(m)’); ylabel(‘幅值(dB)’);title(‘距离维FFT’);
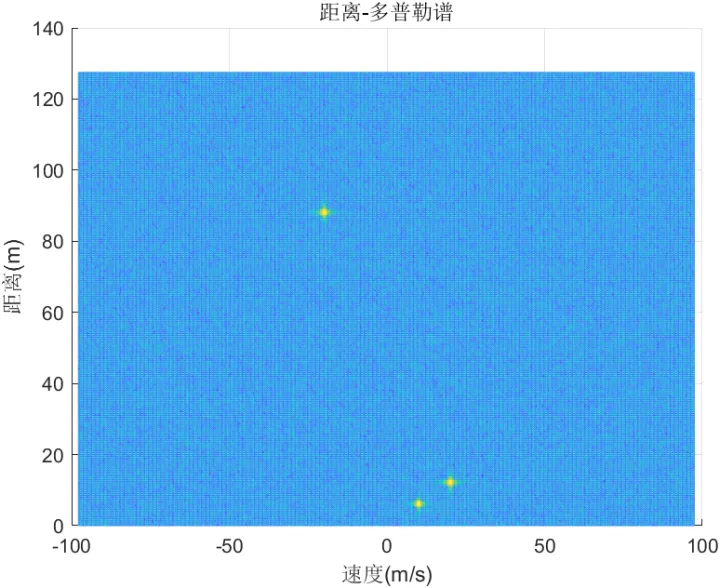
五、速度估计
计算速度和计算距离的顺序可以交替,就像我在之前的文章(知乎答疑 | 雷达信号处理中的距离维FFT和速度维FFT的执行顺序能够交换嘛?)中谈到的那样。
这里需要对所有接收通道都做FFT,其实如果时单纯计算目标的速度和距离的话,利用一个通道就可以了,但是为了后续进行CFAR检测之前做非相干积累,这里必须多所有通道处理。
%% 2D FFT
%% 距离-多普勒谱
channelNum = size(rawData,1);
rangebinNum = size(rawData,2);
dopplerbinNum = size(rawData,3);
fft2dDataPower= zeros(size(rawData));
fft2dDataDB = zeros(size(rawData));
fftRADataPower= zeros(size(rawData));
for chanId = 1:1:channelNum
fft2dDataPower(chanId,:, : ) = RDfftMatrix(rawData(chanId,:,: ));
end% figure(4);
% mesh(dopplerIndex’,rangeIndex,db(abs(squeeze(fft2dDataPower(chanId,:,: )))));
% view(2);
% xlabel(‘速度(m/s)’); ylabel(‘距离(m)’); zlabel(‘幅值’);
% title(‘距离-多普勒谱’);
% mesh(abs(squeeze(fft2dDataPower(chanId,:,: ))));
速度估计得到的时距离-多普勒谱,也就是RD图。这里距离和速度估计统一做FFT,代码如下,并且还采用了hanning窗加窗处理(加权)。关于雷达信号处理加窗的详细原理,在文章(雷达信号处理中的离散傅里叶变换(DFT)以及加窗)中有说明。
rawData = squeeze(rawData);
[rangeBin,dopplerBin] = size(rawData);
rangeWin = hanning(rangeBin);
rangeWin2D = repmat(rangeWin,1,dopplerBin);
dopplerWin = hanning(dopplerBin)';
dopplerWin2D = repmat(dopplerWin,rangeBin,1);
rawDataWin = rawData .* rangeWin2D;
fft1dData = fft(rawDataWin,rangeBin,1);
fft1dDataWin = fft1dData .* dopplerWin2D;
fft2dData = fftshift(fft(fft1dDataWin,dopplerBin,2),2);
距离处理不需要fftshift,速度需要fftshift处理把零速度通道(零频分量)移到中点,重新排列傅里叶变换。
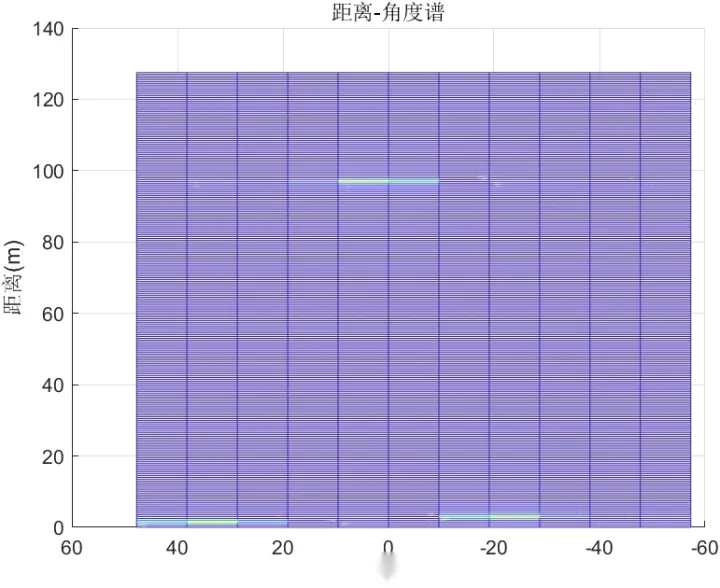
六、角度估计
角度估计和距离估计也是放在一起的,这里为了方便体现二者之间的关系。步骤与距离和速度估计一样,代码如下,也是采用了hanning窗加窗,窗函数可以选择其他的,比如泰勒窗、布莱克曼窗等等,具体看信噪比以及其他方面的需求。
rawData = squeeze(rawData);
[angleBin,rangeBin] = size(rawData);
angleWin = hanning(angleBin);
angleWin2D = repmat(angleWin,1,rangeBin);
rangeWin = hanning(rangeBin)';
rangeWin2D = repmat(rangeWin,angleBin,1);
rawDataWin = rawData .* angleWin2D;
fft1dData = fftshift(fft(rawDataWin,angleBin,1));
fft1dDataWin = fft1dData .* rangeWin2D;
fft2dData = fft(fft1dDataWin,rangeBin,2);
计算结果如下图所示,符合目标参数中的角度设置,但是角度还是有些不太精确,还要看后续进行多普勒补偿后再看看结果如何。
parameter.target = [100 -20 0; %target1 range speed angle0 10 -30; %target2 range speed angle0 20 30; %target2 range speed angle ];
七、非相干累积
相干累积速度估计时做FFT时体现的,利用多个chirp做FFT就是相干积累,非相干积累就是纯粹的幅值叠加,二者之间的信噪比改善是不同的。
[channelNum,rangeBin,dopplerBin] = size(fft2dDataDB);
accumulateRD = zeros(rangeBin,dopplerBin);
for channelId = 1:channelNum
accumulateRD = accumulateRD + (abs(squeeze(fft2dDataDB(channelId,:,:))));
end
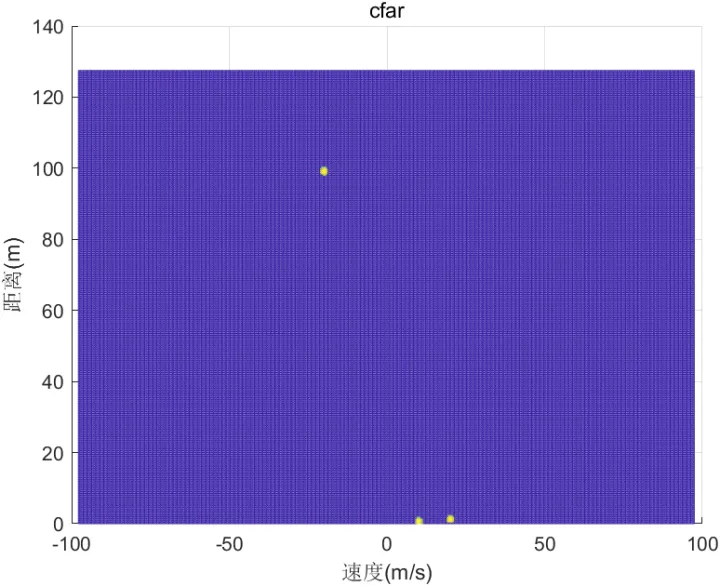
八、CFAR检测
CFAR检测需要预先根据目标特性设置CFAR参数,如参考单元、保护单元、阈值,以及CFAR模式选择(CA-CFAR、SO-CFAR、GO-CFAR、OS-CFAR)等。
parameter.dopplerMethod = 1; %1:ca-cfar 2:so-cfar 3:go-cfar
parameter.dopplerSNR = 10;
parameter.dopplerWinGuardLen = 2;
parameter.dopplerWinTrainLen = 8;
parameter.rangeMethod = 1; %1:ca-cfar 2:so-cfar 3:go-cfar
parameter.rangeSNR = 10;
parameter.rangeWinGuardLen = 2;
parameter.rangeWinTrainLen = 4;
CFAR检测采用两次一维CFAR组成二维CFAR,首先再速度为进行一次CA-CFAR,然后再距离维再进行一次CA-CFAR,这样可以减少计算量。
上述中CFAR阈值也被称为门限因子,通常门限因子是10进制的常数: T 0 ⩾ K 0 Z T 0 \geqslant K_0 Z T0⩾K0Z ,Z是左右参考单元平均后的平均值,K0是常数。
但是某些情况下也需要转为对数(dB),转换公式为:
T = 10 ∗ log ( Z ) + 10 ∗ log ( K 0 ) T=10 * \log (Z)+10 * \log (K 0) T=10∗log(Z)+10∗log(K0)
代码中设置为T=10dB((程序中是parameter.dopplerSNR)):
T = 20 ∗ log 10 ( T 0 ) , T 0 = 1 0 ( T / 20 ) , T 2 = log 2 ( T 0 ) = log 2 ( 1 0 ′ T / 20 ) = T / 6 \left.T=20 * \log 10(T 0), \quad T 0=10^{(} T / 20\right), T 2=\log 2(T 0)=\log 2\left(10^{\prime} T / 20\right)=T / 6 T=20∗log10(T0),T0=10(T/20),T2=log2(T0)=log2(10′T/20)=T/6
在MATLAB中采用log10()好计算,但是在硬件平台采用log2()更好,因为计算机都是二进制,计算效率高一些。TI的程序代码中CFAR阈值设置的是一个十进制数(Tcli =5120),转换为对数后T=15dB,转化公式为:
T c l i = 256 × T_{c l i}=256 \times Tcli=256× numVirtualAntennas × T ( d B ) / 6 \times \mathrm{T}(\mathrm{dB}) / 6 ×T(dB)/6
CFAR检测的结果如下图所示:
九、峰值聚合
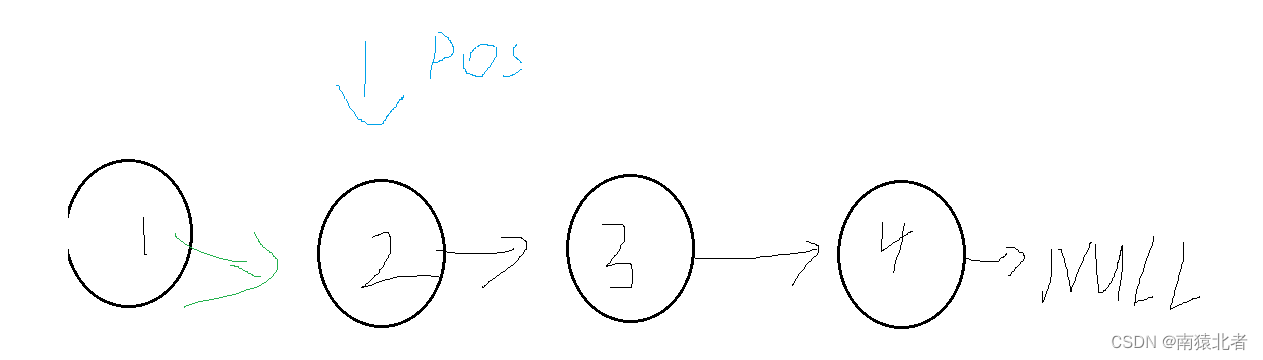
峰值聚合的目的是为了对CFAR检测之后的目标点进行一次精细搜索,本次仿真所涉及到的原理如下图所示。
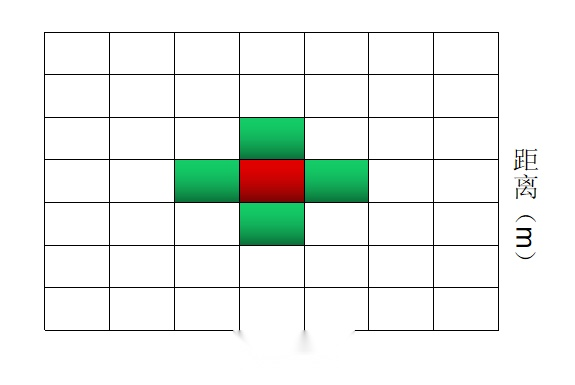
(峰值聚合模型)
对照代码分析,简单一句话就是判断某一个点是否比周围四个点大,如果大于,就是需要的点,如果不是那就舍弃,如代码中第二个if。
peakSearchList = [];
[rangeLen, dopplerLen] = size(RD_cfar);
RD_pearkSearch = zeros(rangeLen, dopplerLen);
length = size(cfarTargetList,2);
for targetIdx = 1:length
rangeIdx = cfarTargetList(1,targetIdx);
dopplerIdx = cfarTargetList(2,targetIdx); %坐标
if rangeIdx > 1 && rangeIdx < rangeLen && dopplerIdx > 1 && dopplerIdx < dopplerLen %边界点不考虑
if RD_cfar(rangeIdx,dopplerIdx) > RD_cfar(rangeIdx - 1,dopplerIdx) && ...
RD_cfar(rangeIdx,dopplerIdx) > RD_cfar(rangeIdx + 1,dopplerIdx) && ...
RD_cfar(rangeIdx,dopplerIdx) > RD_cfar(rangeIdx,dopplerIdx - 1) && ...
RD_cfar(rangeIdx,dopplerIdx) > RD_cfar(rangeIdx,dopplerIdx + 1)
RD_pearkSearch(rangeIdx,dopplerIdx) = RD_cfar(rangeIdx,dopplerIdx);
cfarTarget = [rangeIdx ; dopplerIdx];
peakSearchList = [peakSearchList cfarTarget];
end
end
end
峰值聚合后的结果如下图所示:
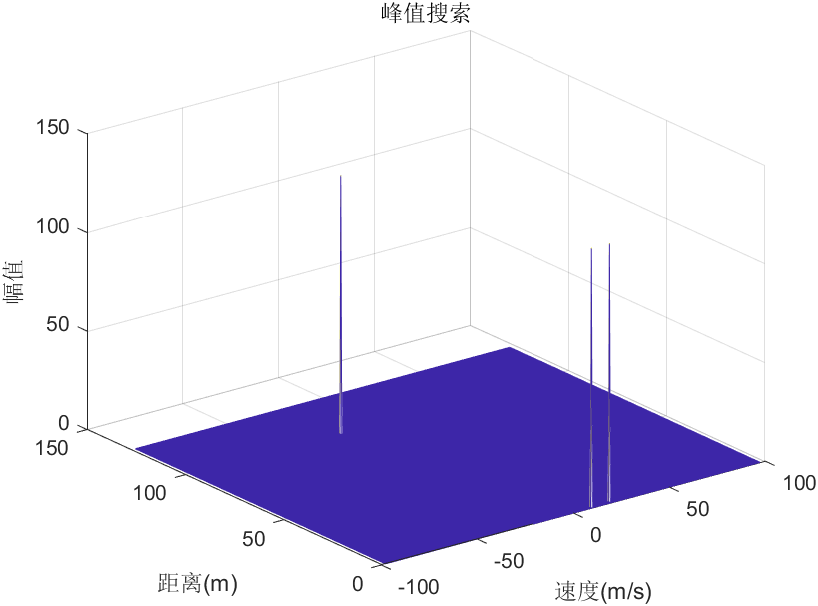
峰值聚合的算法不止上面这种,另外还有很多,感兴趣的同学可以自己检索。
十、多普勒补偿
之前的角度估计是利用3D-FFT来实现的,由于FMCW是利用相邻chirp间的相位差的变化来估计目标速度的,并没有考虑运动目标的多普勒频移,根据接收信号模型:
Sr = 10exp((1i2pi)((centerFreq-fd)(t-tau+( chirpId-1) * Tr)+slope/2(t-tau).^2 + wx)); %回波信号
假设,雷达在2T4R TDM-MIMO的工作方式下,TX2形成的4个虚拟天线会由于运动目标的多普勒效应相对于TX1形成的4个虚拟天线将产生一个多普勒相位偏移,这种多普勒偏移引起的相位差会映射到角度上,引起测角不准确。因此,对目标进行角度估计前须对相位偏移进行校正,也称作多普勒相位补偿,保证角度估计的准确性。
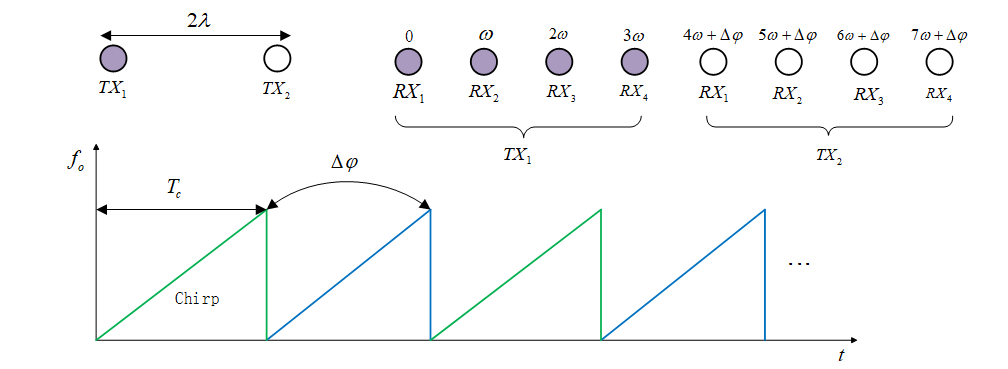
(多普勒偏移)
关于多普勒相位补偿和速度扩展算法的原理,可以阅读TI官方的文档:基于AWR1642汽车雷达的速度扩展算法研究.pdf。多普勒补偿的程序也比较简单,主要就是利用之前计算出来的速度值,把相位偏移计算出来:
Δ φ = 2 π Δ f T c \Delta \varphi=2 \pi \Delta f T_c Δφ=2πΔfTc
其中 Δ f \Delta f Δf 为多普勒频偏, T c T_c Tc 为chirp调制时间,上述公式在代码中被转化为单纯的多普勒单元做运算了,具体转换公式如下所示:
Δ φ = 2 π Δ f T c = 2 π 2 V r λ T c = 2 π 2 T c λ Δ V r ∗ n = 2 π 2 T c λ ∗ λ 2 N ∗ T c ∗ n = 2 π ∗ n N \Delta \varphi=2 \pi \Delta f T_c=2 \pi \frac{2 V_r}{\lambda} T_c=2 \pi \frac{2 T_c}{\lambda} \Delta V_r * n=2 \pi \frac{2 T_c}{\lambda} * \frac{\lambda}{2 N * T_c} * n=2 \pi * \frac{n}{N} Δφ=2πΔfTc=2πλ2VrTc=2πλ2TcΔVr∗n=2πλ2Tc∗2N∗Tcλ∗n=2π∗Nn
其中,n就是当前速度所在的多普勒单元索引,N就是全部多普勒单元索引,然后再补偿回去就ok了,具体看下面的程序就一目了然。
compCoffVec = zeros(parameter.virtualAntenna,1);
txNum = length(parameter.txAntenna);
rxNum = length(parameter.rxAntenna);
phi = 2 * pi * (speedBin - parameter.dopplerBin/2 - 1) / parameter.dopplerBin;
delta = phi
for txId = 1:txNum
for rxId = 1:rxNum
compCoffVec((txId-1) * rxNum + rxId) = exp(-1i * (txId-1) * delta);
end
end
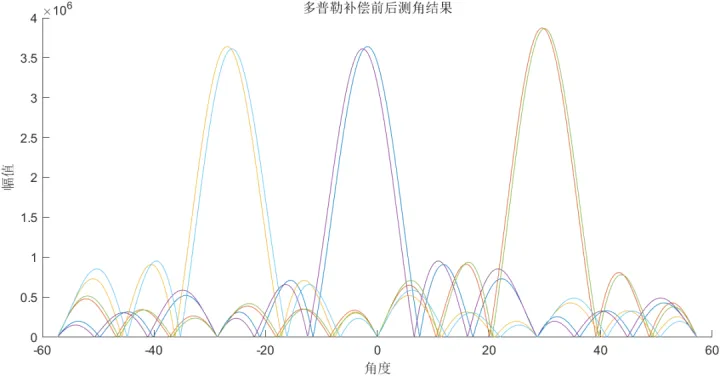
经过多普勒补偿前后的角度结果对比如下图所示,上图为整体角度差异,下图为局部角度差异,可见多普勒补偿后角度更加接近实际值:
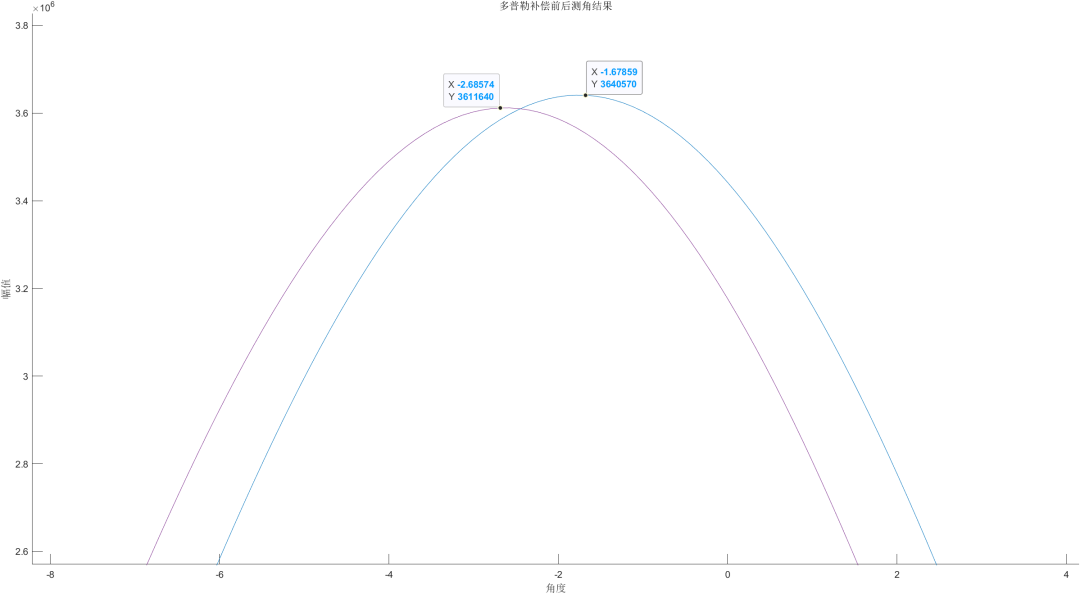
(局部图,左边为未补偿,右边为补偿后)
十一、DOA估计
终于到最后一节了,不容易啊,经过多普勒补偿之后角度会更加准确,在仿真程序中采用了三种DOA估计算法,分别是FFT、DBF以及Capon,三种算法都可以选择。其中DBF关键在于计算加权系数,然后加权求和:
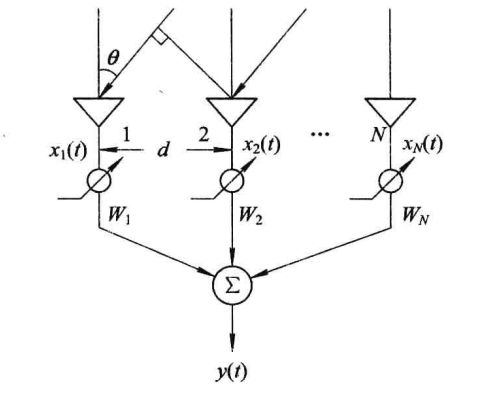
for degscan = deg
for txId = 1:txNum
for rxId = 1:rxNum
dphi = ((txId-1) * rxNum + rxId - 1) * 2 * pi / lambda * dx * sind(degscan);
weightVec((txId-1) * rxNum + rxId) = exp(-1i * dphi);
end
end
doa_dbf(kk) = antVec'*weightVec;
kk = kk + 1;
end
doa_abs = abs(doa_dbf);
[pk,loc]=max(doa_abs);
angle = deg(loc);
FFT算法跟之前一样,比较简单:
angleIndex = asin((-512:1:512-1)/512) * 180 / pi;
doa_fft=fftshift(fft(antVec,1024));
doa_abs=abs(doa_fft);
[pk,loc]=max(doa_abs);
angle = angleIndex(loc);
Capon公式稍微多一些,但也不复杂,三个算法本质上都是空间滤波。
kk = 1;
for degscan = deg
for txId = 1:txNum
for rxId = 1:rxNum
virtualAntennaId = (txId-1) * rxNum + rxId - 1;
dphi = 2 * pi / lambda * dx * virtualAntennaId * sind(degscan);
a((txId-1) * rxNum + rxId) = exp(-1i * dphi);
end
end
RxInv = inv(Rx);
P_out(kk) = 1/(a'*RxInv*a);
kk = kk + 1;
end
DOA估计部分,读者可以自由发挥,各种超分辨算法(如MUSIC)、快速单快拍FFT DOA都可以加进来仿真看效果,这里给予大家的自由度是非常高的。
参考资料
【1】Analysis and Comparison of MIMO Radar Waveforms
【2】https://blog.csdn.net/Xiao_Jie123/article/details/126538880
结语
本文花费了大量时间来编程序、读程序、写文章,但是为了感谢各位读者长期以来的关注和支持,所以就一瓶冰红茶钱,基于本文的程序,各位读者还可以将TDMA-MIMO模式修改为DDMA-MIMO模式,参考TI的文档实现DDMA-MIMO加入空带(EmptyBand)解速度模糊,挺好玩的。另外很多算法、方案都可以基于本程序进行探索,祝愿大家一切顺利!
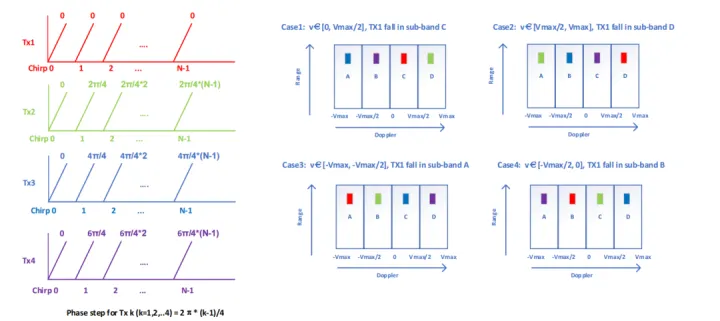
(DDMA-MIMO步进相位)
本文涉及到的代码下载方式为:https://zhuanlan.zhihu.com/p/576353487