首先,存在无序的点集.
记.
再记初始路径为.
于是,我们称以下为一次变换:
if |C[i]-C[i+1]|+|C[i+2]-C[i+3]| > |C[i]-C[i+2]|+|C[i+1]-C[i+3]|
{
swap(C[i+1],C[i+2]);
} 需要注意的是.
最直观的就是如下的变换:

我们对C上的每一点,依次进行如上的变换,不断的循环,直至不再需要变换,此时的路径C就是最短路径。因为每次变换后,C上的点只是两个点之间交换了顺序,而其他的点不变,同时,变换后的路径,又能保证比变换前的短,所以我们可以断定此种方法是收敛的。而且最终会达到极小值,而此时,再对C上的每一次做T,都不会进入到上述的if里面。
现在,我们来初步的看看此种方式的最大复杂度。
我们将初始路径作个变形:

若我们从到
,依次作
变换。最开始,若每次
都会
一次,则在链上,每次
变换后,
都会顺时针移动一位。我们称
次
为一次循环。每次循环后,必定会有一个点挪到末端。若假设其中有
个点需要做变换,那么就会有
次循环,每次循环有
次变换。这是最大的计算复杂度。
另外,我们需要关注到的是,每经过一次循环后,每个路径上,都会将离的近的点拉进,离得远的点推远。靠近s端的点会变得靠s端,靠近e端的会变得靠e端。
基于这样的一个现象,如果我们在初始化路径的时候,能自动的,将互相靠近的点相连接,那么,将会大大缩短循环的次数。
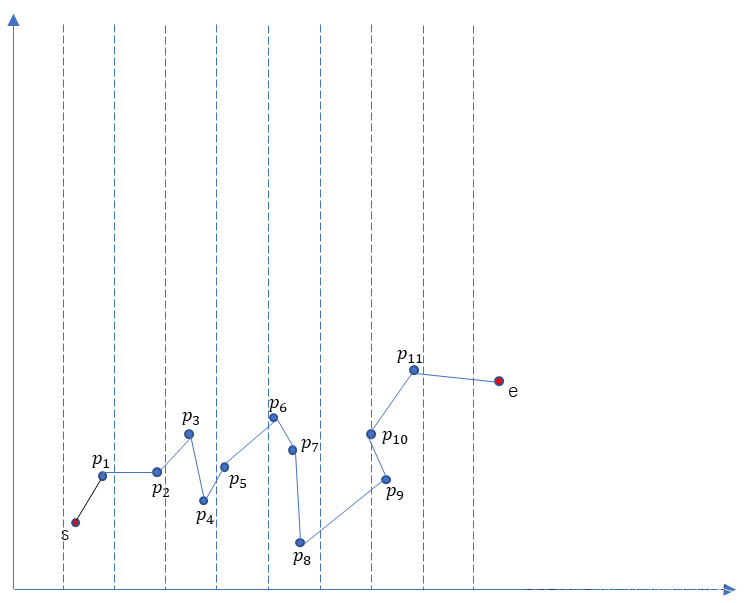
在这里提出一种方式,我们将坐标平面沿X轴,以的间隔进行分割,来进行初始化路径。具体的伪代码形式:
点集:D={P1,P2,P3,...,Pn}
二维数组:A[][];
int d=10;//栅格间距
int max_i=0;//最大的区间数
for i=0;i<D.size();i++
{
A[D[i].x/d].push_back(D[i]);
if D[i].x/d > max_i
max_i=D[i].x/d;
}
设路径序列C={}
则我们生成路径
for n=0;n<max_i;n++
{
for t=0;t<A[n].size;t++
{
C.push_back(A[n][t]);
}
}
C.insert(s) at 0;
C.push_back(e);
最后,我们开始逐项局部优化
bool is_changed=false;
Optimize:
for i=0;i<C.size-3;i++
{
if |C[i]-C[i+1]|+|C[i+2]-C[i+3]| > |C[i]-C[i+2]|+|C[i+1]-C[i+3]|
{
exchange(C[i+1],C[i+2]);
is_changed=true;
}
}
if is_changed
go back to Optimize;
else
{
if |C[0]-C[1]|+|C[C.size-1]-C[C.size-2]| > |C[0]-C[C.size-2]|+|C[C.size-1]-C[0]|
exchange(C[0],C[C.size-1]);
}
此算法只是初步设想,具体的算法运行效率,后续会做试验进行验证。有什么不对之处,望指教出来,谢谢!