Mike11软件包由水动力、对流~扩散、水质、降雨~径流、洪水预报等模块组成,核心模块为水动力模块。Mike11水动力模块采用6点Abbott~Ionescu有限差分格式对圣维南方程组求解。
一、圣维南方程组
1、基本要素与假设条件
Mike11模型基于以下三个要素:反映有关物理定律的微分方程组;对微分方程组进行线性化的有限差分格式;求解线性方程组的算法。并基于以下几个假定:流体为不可压缩、均质流体;一维流态; 坡降小、纵向断面变化幅度小;符合静水压力假设。
2、圣维南方程组
{
δ
Q
δ
x
+
δ
A
δ
t
=
q
δ
Q
δ
t
+
δ
(
α
Q
2
A
)
δ
x
+
g
A
δ
h
δ
x
+
g
Q
∣
Q
∣
C
2
A
R
=
0
\left\{\begin{array}{l} \frac{\delta Q}{\delta x}+\frac{\delta A}{\delta t}=q \\ \frac{\delta Q}{\delta t}+\frac{\delta\left(\alpha \frac{Q^{2}}{A}\right)}{\delta x}+g A \frac{\delta h}{\delta x}+\frac{g Q|Q|}{C^{2} A R}=0 \end{array}\right.
⎩
⎨
⎧δxδQ+δtδA=qδtδQ+δxδ(αAQ2)+gAδxδh+C2ARgQ∣Q∣=0
式中:Q为流量,m³/s;q为侧向入流,m³/s;A为过水面积,m²;h为水位,m;R为水力半径,m;C为谢才系数;a为动量修正系数。
3、方程离散
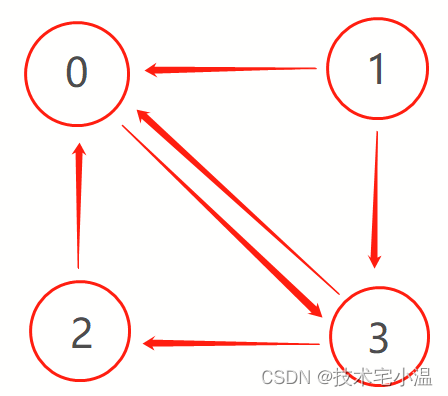
圣维南方程中的连续性方程和动量方程通过有限差分法进行离散,计算网格由流量点和水位点组成,其中流量点和水位点在同一时间步长下分别进行 计算,见图。计算网格由模型自动生成,水位点是横断面所在的位置,相邻水位点之间的距离可能 不同,流量点位于两个相邻的水位点之间。计算网格点的分布遵循以下规则:①河段上下游端点为计算水 位点;②支流入流点为计算水位点;③实测断面资料 点为计算水位点;④模型根据max△r值自动插入的点为计算水位点;⑤建筑物点为计算水位点;⑥两个水位点之间只存在一个计算流量点。

1. 连续方程
在连续方程中,引入蓄存宽度
b
s
b_{s}
bs:
∂
A
∂
t
=
b
s
∂
h
∂
t
(1)
\frac{\partial A}{\partial t}=b_{s}\frac{\partial h}{\partial t}\tag{1}
∂t∂A=bs∂t∂h(1)
从而连续方程转变为:
∂
Q
∂
x
+
b
s
∂
h
∂
t
=
q
(2)
\frac{\partial Q}{\partial x}+b_{s}\frac{\partial h}{\partial t}=q\tag{2}
∂x∂Q+bs∂t∂h=q(2)
由公式可以看出仅流量Q与x有关,方程很容易得到以h点为中心的6点隐式格式见图。
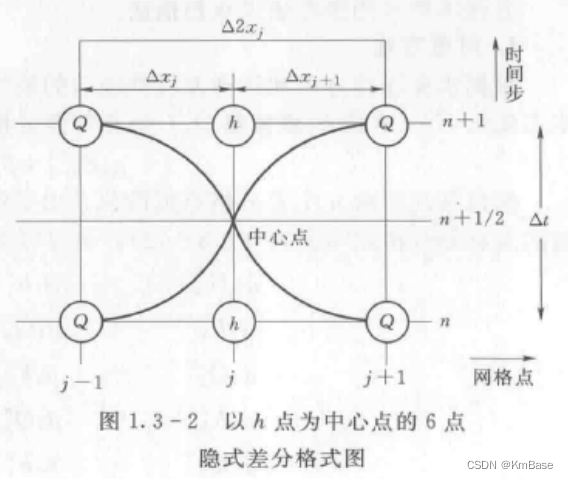
应用该离散格式,则连续方程变为:
∂
Q
∂
x
≈
Q
j
+
1
n
+
1
+
Q
J
+
1
n
2
−
Q
j
−
1
n
+
1
+
Q
j
−
1
n
2
Δ
2
x
j
(3)
\frac{\partial Q}{\partial x} \approx \frac{\frac{Q_{j+1}^{n+1}+Q_{J+1}^{n}}{2}-\frac{Q_{j-1}^{n+1}+Q_{j-1}^{n}}{2}}{\Delta 2 x_{j}}\tag{3}
∂x∂Q≈Δ2xj2Qj+1n+1+QJ+1n−2Qj−1n+1+Qj−1n(3)
∂
h
∂
t
≈
h
j
n
+
1
−
h
j
n
Δ
t
(4)
\frac{\partial h}{\partial t} \approx \frac{h_{j}^{n+1}-h_{j}^{n}}{\Delta t}\tag{4}
∂t∂h≈Δthjn+1−hjn(4)
b
s
≈
A
e
,
j
+
A
e
,
j
+
1
Δ
2
x
j
(5)
b_{s} \approx\frac{A_{e, j}+A_{e, j+1}}{\Delta 2 x_{j}}\tag{5}
bs≈Δ2xjAe,j+Ae,j+1(5)式中:
A
e
,
j
A_{e, j}
Ae,j为网格点 j-1 与 j 之间的水面面积;
A
o
,
j
+
1
A_{o, j+1}
Ao,j+1为网格点 j 与 j+1 之间的水面面积;
Δ
2
x
j
\Delta 2 x_{j}
Δ2xj 为网格点 j-1 与 j+1 之间的距离。
将式(3)、式(4)代入方程(2) 变为:
Q
j
+
1
n
+
1
+
Q
j
+
1
n
2
−
Q
j
+
1
n
+
1
+
Q
j
−
1
n
2
△
2
x
+
b
s
(
h
j
n
+
1
−
h
j
n
)
△
t
=
q
j
\frac {\frac{Q_ {j+1}^ {n+1}+Q_ {j+1}^ {n}}{2}-\frac {Q_ {j+1}^ {n+1}+Q_ {j-1}^ {n}}{2}}{\triangle 2x}+b_ {s} \frac {(h_ {j}^ {n+1}-h_{j}^ {n})}{\triangle t} =q_{j}
△2x2Qj+1n+1+Qj+1n−2Qj+1n+1+Qj−1n+bs△t(hjn+1−hjn)=qj
该方程可以简化为:
α
j
Q
j
−
1
n
+
1
+
β
j
h
j
n
+
1
+
γ
j
Q
j
+
1
n
+
1
=
δ
j
(6)
\alpha_{j}Q_{j-1}^{n+1}+\beta_{j}h_{j}^{n+1}+\gamma_{j}Q_{j+1}^{n+1}=\delta_{j}\tag{6}
αjQj−1n+1+βjhjn+1+γjQj+1n+1=δj(6)式中:a、β、γ为b和δ的函数,其值决定于h点在时间n处及Q点在时间n+1/2处的值。
2. 动量方程
动量方程集中在流量点,其网格形式为以Q点为中心点的差分格式见图3。
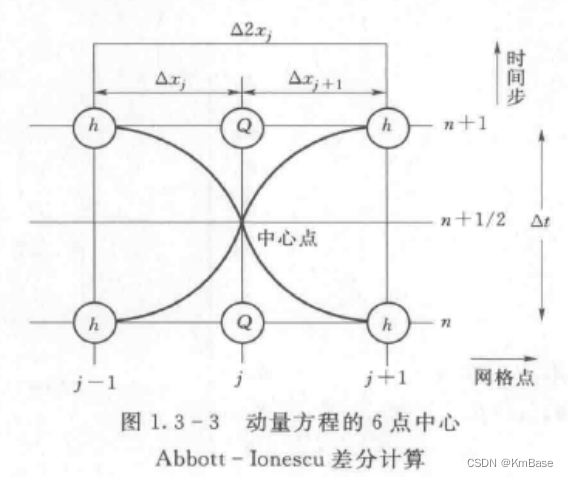
依据6点中心Abbott - Ionescu差分法,动量方程可以表示如下:
∂
Q
∂
t
≈
Q
j
n
+
1
−
Q
j
n
△
t
(7)
\frac{\partial Q}{\partial t}\approx \frac{Q_{j}^{n+1}-Q_{j}^{n}}{\triangle t}\tag{7}
∂t∂Q≈△tQjn+1−Qjn(7)
∂
(
α
Q
2
A
)
∂
x
≈
[
α
Q
2
A
]
j
+
1
n
+
1
/
2
−
[
α
Q
2
A
]
j
−
1
n
+
1
/
2
△
2
x
i
(8)
\frac {\partial (\alpha \frac {Q^2}{A})}{\partial x}\approx \frac{[\alpha \frac{Q^2}{A}]_{j+1}^{n+1/2}-[\alpha \frac{Q^2}{A}]_{j-1}^{n+1/2}}{\triangle 2xi}\tag{8}
∂x∂(αAQ2)≈△2xi[αAQ2]j+1n+1/2−[αAQ2]j−1n+1/2(8)
∂
h
∂
x
=
h
j
+
1
n
+
1
+
h
j
+
1
n
2
−
h
j
−
1
n
+
1
+
h
j
−
1
n
2
△
2
x
j
(9)
\frac {\partial h}{\partial x}=\frac{\frac{h_{j+1}^{n+1}+h_{j+1}^{n}}{2}-\frac{h_{j-1}^{n+1}+h_{j-1}^{n}}{2}}{\triangle 2x_{j}}\tag{9}
∂x∂h=△2xj2hj+1n+1+hj+1n−2hj−1n+1+hj−1n(9)
对公式(8)中的二次项,引入以下公式:
Q
2
≈
θ
Q
j
n
+
1
Q
j
n
−
(
θ
−
1
)
Q
j
n
Q
j
n
(10)
Q^2\approx \theta Q_{j}^{n+1}Q_{j}^{n}-(\theta -1)Q_{j}^{n}Q_{j}^{n}\tag{10}
Q2≈θQjn+1Qjn−(θ−1)QjnQjn(10)式 中 : θ 角的值通过HD参数文件“默认值”中的“THETA”系数来给定,默认值为1。
由上,动量方程可以表达为:
α
j
h
j
−
1
n
+
1
+
β
j
Q
j
n
+
1
+
γ
j
h
j
+
1
n
+
1
=
δ
j
(11)
\alpha _{j}h_{j-1}^{n+1}+\beta _{j}Q_{j}^{n+1}+\gamma _{j}h_{j+1}^{n+1}=\delta _{j}\tag{11}
αjhj−1n+1+βjQjn+1+γjhj+1n+1=δj(11)其中
α
j
=
f
(
A
)
\alpha _j=f(A)
αj=f(A)
β
j
=
f
(
Q
j
n
,
Δ
t
,
Δ
x
,
C
,
A
,
R
)
\beta _j=f(Q_{j}^{n},\Delta t,\Delta x,C,A,R)
βj=f(Qjn,Δt,Δx,C,A,R)
γ
j
=
f
(
A
)
\gamma _j=f(A)
γj=f(A)
δ
j
=
f
(
A
,
Δ
x
,
Δ
t
,
α
,
q
,
v
,
θ
,
h
j
−
1
n
,
Q
j
−
1
n
+
1
/
2
,
Q
j
n
,
h
j
+
1
n
,
Q
j
+
1
n
+
1
/
2
)
\delta _j=f(A,\Delta x,\Delta t,\alpha,q,v,\theta,h _{j-1}^{n},Q _{j-1}^{n+1/2},Q _{j}^{n},h _{j+1}^{n},Q _{j+1}^{n+1/2})
δj=f(A,Δx,Δt,α,q,v,θ,hj−1n,Qj−1n+1/2,Qjn,hj+1n,Qj+1n+1/2)
在默认的条件下,软件在一个时间步长里用两次迭代来对这些方程进行求解。初次迭代起始于第 一个时间步长,第二次迭代采用第一次计算值的中心差值来进行计算。迭代次数可以通过NoITER系 数来进行修改。
参考文献
- 《DHI MIKE FLOOD 洪水模拟技术应用与研究》,衣秀勇等编著