前言:
主要记录配置编译lego-loam源码时遇到的问题和解决的方法。
系统:ubuntu18.04
一、安装gtsam
因为系统是18.04所以不需要作很大的更改,按照官网的doc一步一步的来就行了。
根据官网:
GitHub - RobustFieldAutonomyLab/LeGO-LOAM: LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install这个是官网给出的下载编译gtsam的命令,值的注意的是,这里下载编译的gtsam是4.0.0-alpha2版本,属于比较老的版本了。然后在cmake .. 这一步中,因为这个gtsam版本比较老,所以需要用到的Eigen库也比较老,如果之前电脑里面安装了Eigen会被这个版本的产生冲突,所以最好使用这个命令:
cmake -DGTSAM_BUILD_WITH_MARCH_NATIVE=OFF -DGTSAM_USE_SYSTEM_EIGEN=ON ..关闭SSE加速且使用系统自带的Eigen库。
参考文章:
Ubuntu 20.04 下编译 Lego Loam 踩过的一些坑
二、初次编译
按照官方的doc来,安装好了gtsam就可以直接编译运行lego-loam。
cd xx/LeGO_ws
mkdir src && cd src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1这里使用catkin_make -j1是因为使用catkin_make,命令是调用当前计算机的所有核参与运算,lego-loam会用到一些自定义的消息头文件,如果使用多核,就会跳过生成这些头文件的过程。因此使用-j1来进行单核编译。
三、遇到的错误及解决方式
1.pcl版本指向的问题
第一次编译的时候,总会遇到这个错误:
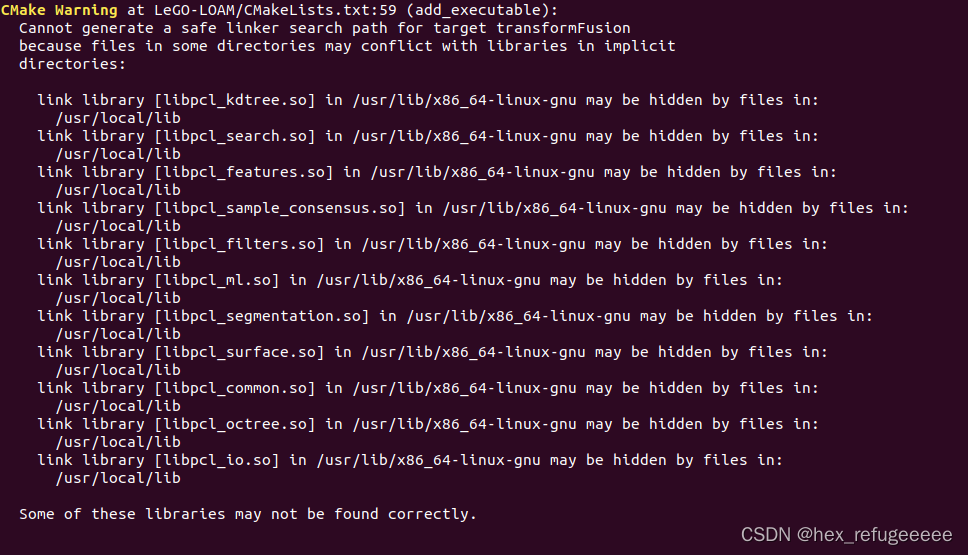
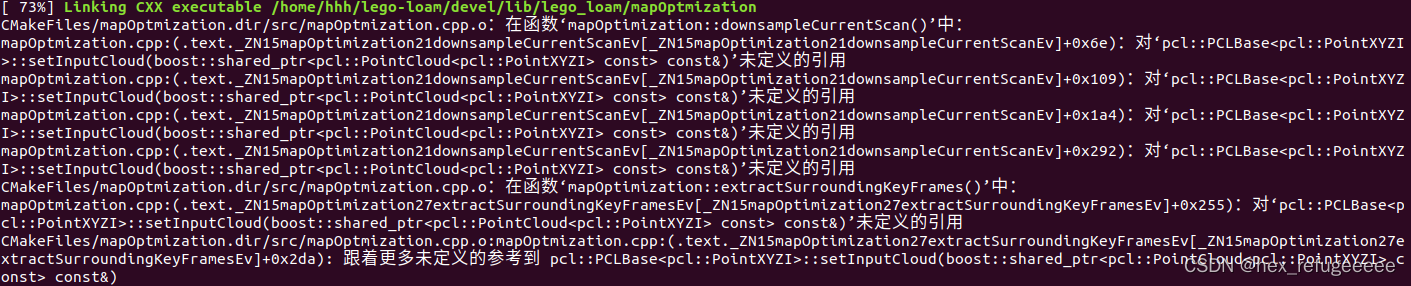
在网上找了一全后,没有发现类似的错误,只能去issue里面看也没有类似的,最后是在issue里面找到一个擦边的。判断应该是不同的pcl库的影响,最后解决了。具体步骤看之前写的这篇文章:
指定不同版本的pcl_hex_refugeeeee的博客-CSDN博客
解决后就成功编译了:

2.运行报错[mapOptmization-7] process has died

这个错误是因为没有把动态链接库的安装路径(例如 /usr/local/lib )放到变量 LD_LIBRARY_PATH 里。所以直接在roslaunch终端里面输入这个命令:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib
之后就成功运行了。
参考文章:
运行lego_loam报错[mapOptmization-7] process has died [pid 11653, exit code 127, cmd /home/p/legoloam/dev_plejahhshsh的博客-CSDN博客_mapoptmization-7]
四、总结
编译运行lego-loam就遇到了上述的问题,这里记录一下。
之后对于lego-loam的学习主要在于它框架里面的地面分离与聚类部分的实现源码。