第八部分、图像操作-4
- 第一节、图像卷积操作
- 1.图像卷积定义
- 2.卷积函数
- 3.代码练习与测试
- 第二节、高斯模糊
- 1.高斯模糊
- 2.函数解释
- 3.代码练习与测试
- 第三节、像素重映射
- 1.像素重映射定义
- 2.重映射函数
- 3.代码练习与测试
- 学习参考
第一节、图像卷积操作
1.图像卷积定义
卷积的基本原理:
- 输入图像
- 输出图像
- 卷积核(窗口大小),卷积核里的数叫卷积核系数/权重/卷积核
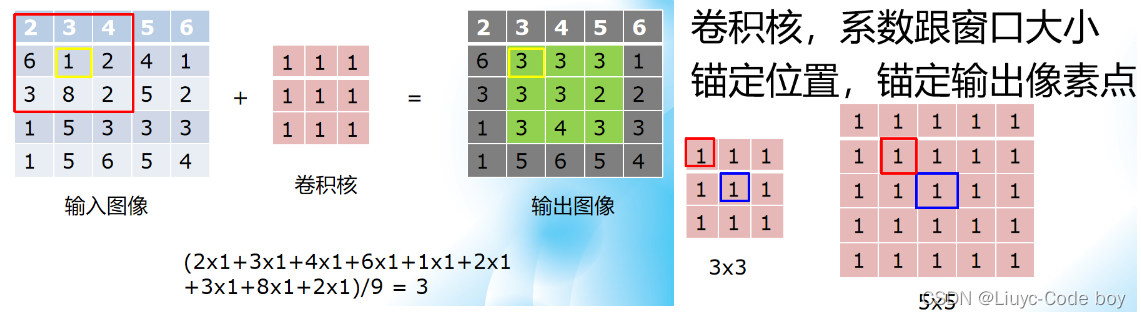
左图所示是原值填充边缘,中间的部分是点乘求和之后取平均值。
卷积的本质:线性组合(矩阵乘法)
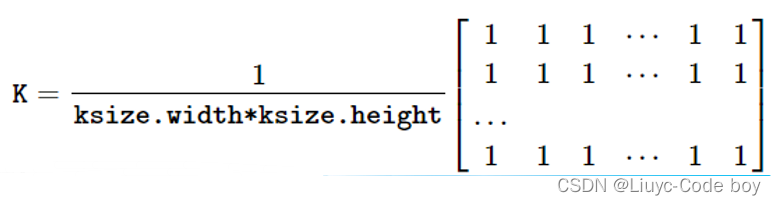
所有卷积核系数都相同如下图都是1,实验证明可以抑制噪声。并且最后求平均值的方法叫做均值卷积,可以用来做图像模糊。
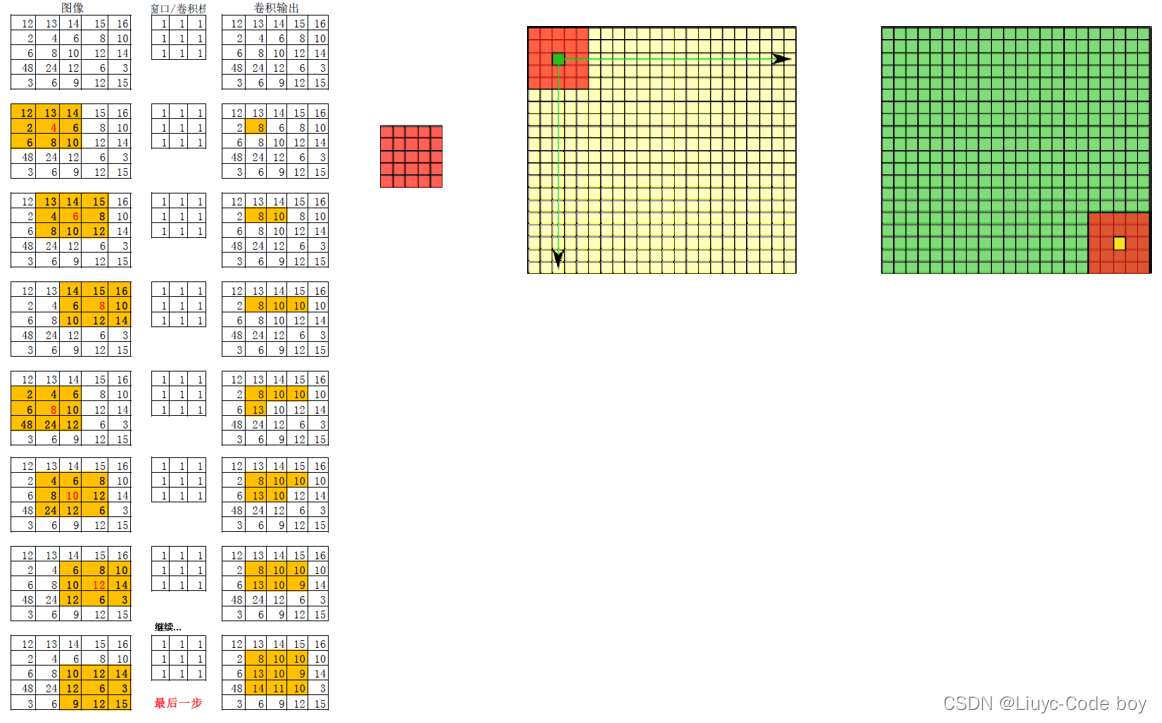
卷积定义示例:
2.卷积函数
最常见的边缘填充函数:
# 边缘处理,边缘填充的方式
1. cv.BORDER_DEFAULT # 边框将是边框元素的镜像gfedcb|abcdefgh|gfedcba
2. cv.BORDER_WRAP # 用另一边(对边)的像素来补偿填充 cdefgh|abcdefgh|abcdefg
3. cv.BORDER_CONSTANT # 填充边缘用指定像素值 iiiiii|abcdefgh|iiiiiii
卷积模糊函数:
cv.blur(src, ksize[, dst[, anchor[, borderType]]]) --> dst
# src表示输入图像 CV_8U, CV_32F or CV_64F
# Ksize卷积核大小
# Anchor锚定位置,默认是赋值在锚点中心位置(-1, -1)
# borderType边缘处理方式
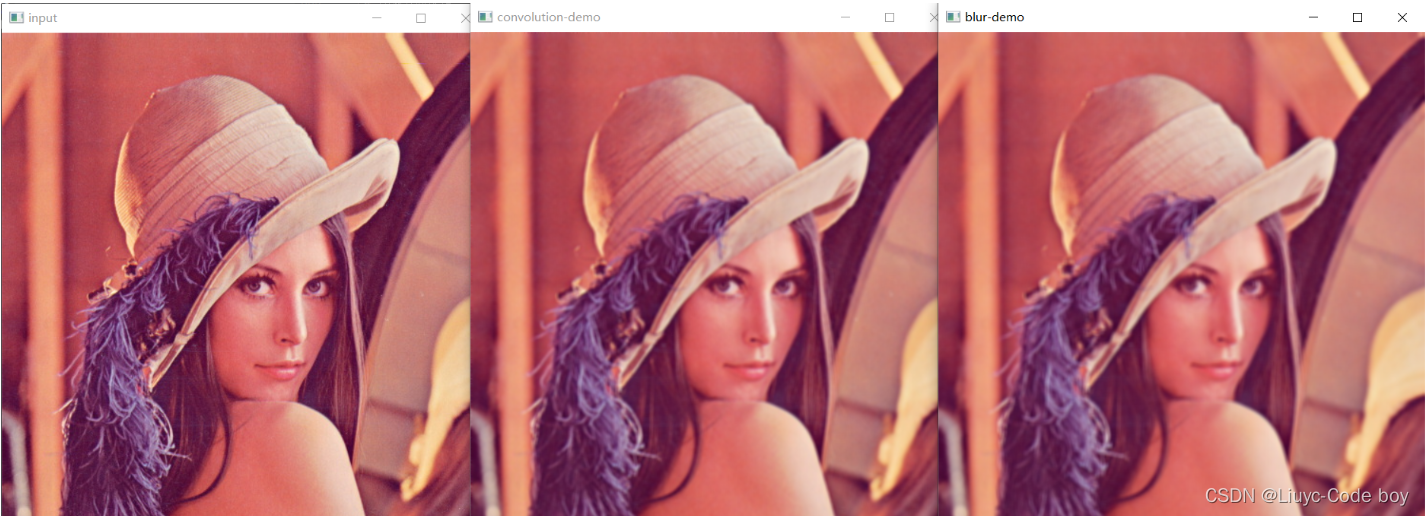
3.代码练习与测试
# 图像卷积操作
def conv_demo():
image = cv.imread(r"F:\python\opencv-4.x\samples\data\lena.jpg")
dst = np.copy(image)
cv.imshow("input", image)
h, w, c = image.shape
# 自定义方法实现卷积
# 从上到下,从左到右,从1开始说明边缘有一个没有绑定会有缝隙,从2开始就可以边缘填满
for row in range(2, h-2, 1):
for col in range(2, w-2, 1):
# 求均值的区域范围是(0, 4)就是0, 1, 2, 3, 4,也就是一个5*5的卷积核
m = cv.mean(image[row-2:row+2, col-2:col+2])
# 把卷积后的均值结果赋值给中心位置
dst[row, col] = (int(m[0]), int(m[1]), int(m[2]))
cv.imshow("convolution-demo", dst)
# 用官方自带的卷积api函数
blured = cv.blur(image, (5, 5), anchor=(-1, -1))
cv.imshow("blur-demo", blured)
cv.waitKey(0)
cv.destroyAllWindows()
结果示例:
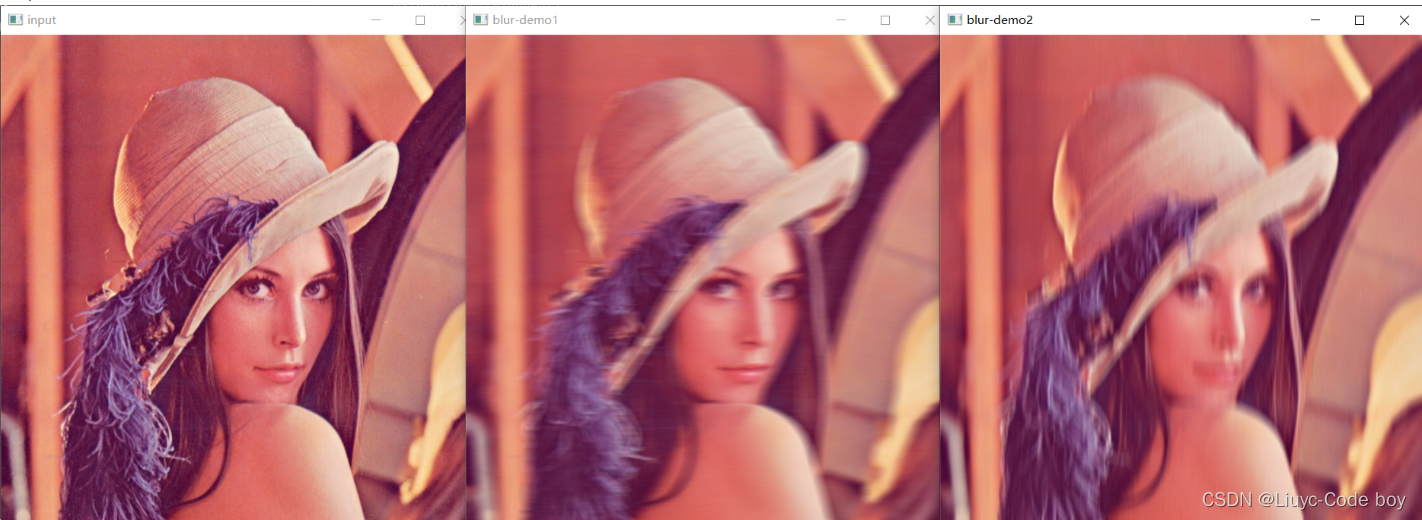
# 窗口大小不是正方形的图像卷积
def conv_demo_2():
image = cv.imread(r"F:\python\opencv-4.x\samples\data\lena.jpg")
cv.imshow("input", image)
# 用官方自带的卷积api函数
# 水平抖动
blured1 = cv.blur(image, (15, 1), anchor=(-1, -1))
cv.imshow("blur-demo1", blured1)
# 垂直抖动
blured2 = cv.blur(image, (1, 15), anchor=(-1, -1))
cv.imshow("blur-demo2", blured2)
cv.waitKey(0)
cv.destroyAllWindows()
结果示例:
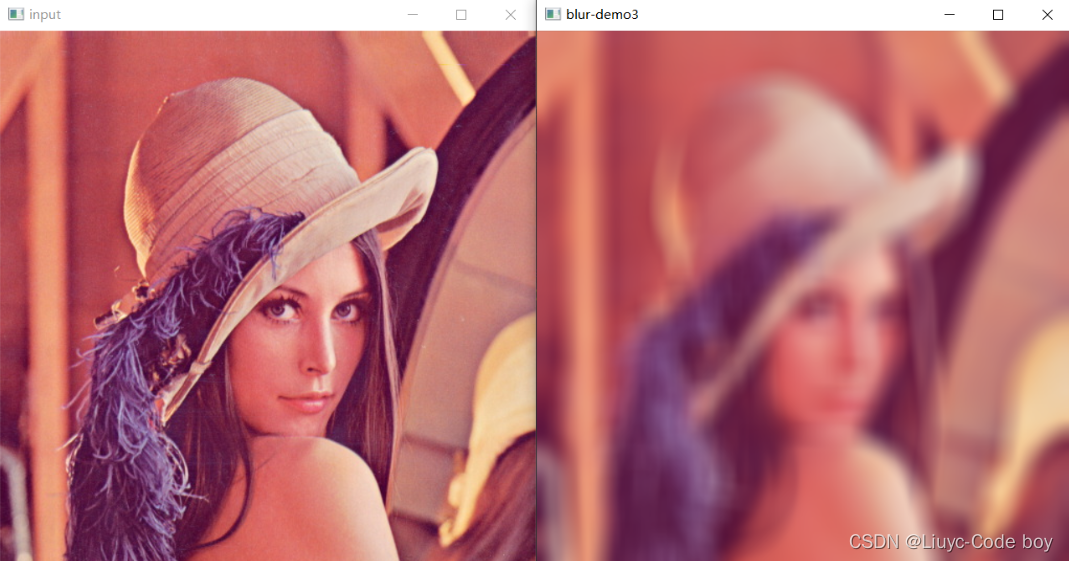
# 模糊操作:系数相同,均值卷积
# 窗口大小不是正方形的图像卷积
def conv_demo_2():
image = cv.imread(r"F:\python\opencv-4.x\samples\data\lena.jpg")
cv.imshow("input", image)
# 用官方自带的卷积api函数
# 模糊操作,系数相同,均值卷积
blured3 = cv.blur(image, (25, 25), anchor=(-1, -1))
cv.imshow("blur-demo3", blured3)
cv.waitKey(0)
cv.destroyAllWindows()
第二节、高斯模糊
1.高斯模糊
卷积核系数相同叫做均值模糊,卷积核系数不同可以做高斯模糊。
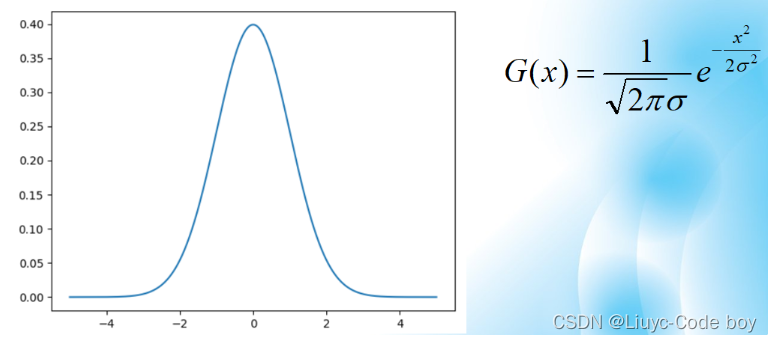
左图所示是均值模糊,右图是高斯模糊,中间的是高斯函数(中间部分是最高的,离中间越远值越小)
高斯模糊下针对不同位置使用高斯公式生成的卷积核叫做**高斯核**。
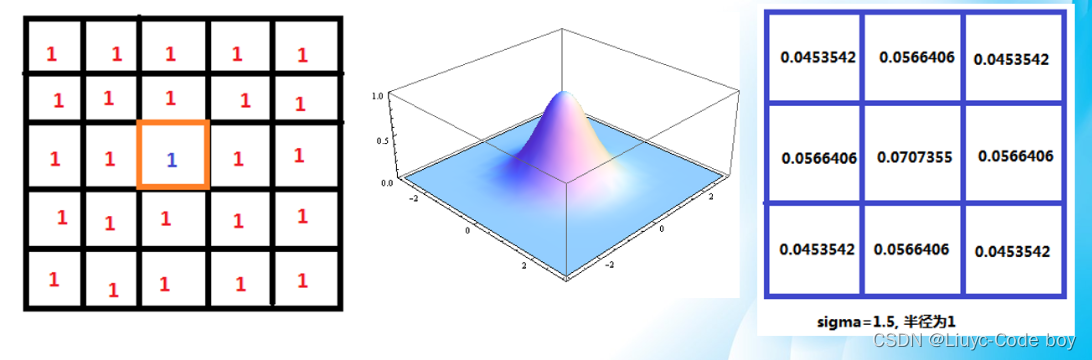
中心对称,不同权重,线性组合
高斯模糊和均值模糊的差异就是,高斯模糊考虑了中心位置对权重的影响。
2.函数解释
# 高斯函数
1. cv.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) -->dst
# ksize窗口大小,必须是正数而且是奇数
# sigmaX高斯核函数X方向标准方差
# sigmaY高斯核函数Y方向标准方差,默认0(表示跟sigmaX相同)
# ksize为0表示从sigmaX计算生成ksize
# ksize大于0表示从ksize计算生成sigmaX
# 所以ksize和sigmaX设一个就行
# 计算方式:σ = 0.3*((size - 1)*0.5 - 1) + 0.8
# ksize取值越大模糊程度越高,sigmaX取值越大模糊程度越高
- 均值模糊 – 卷积核权重系数相同
- 高斯模糊 – 卷积核根据高斯函数生成,权重系数不同
3.代码练习与测试
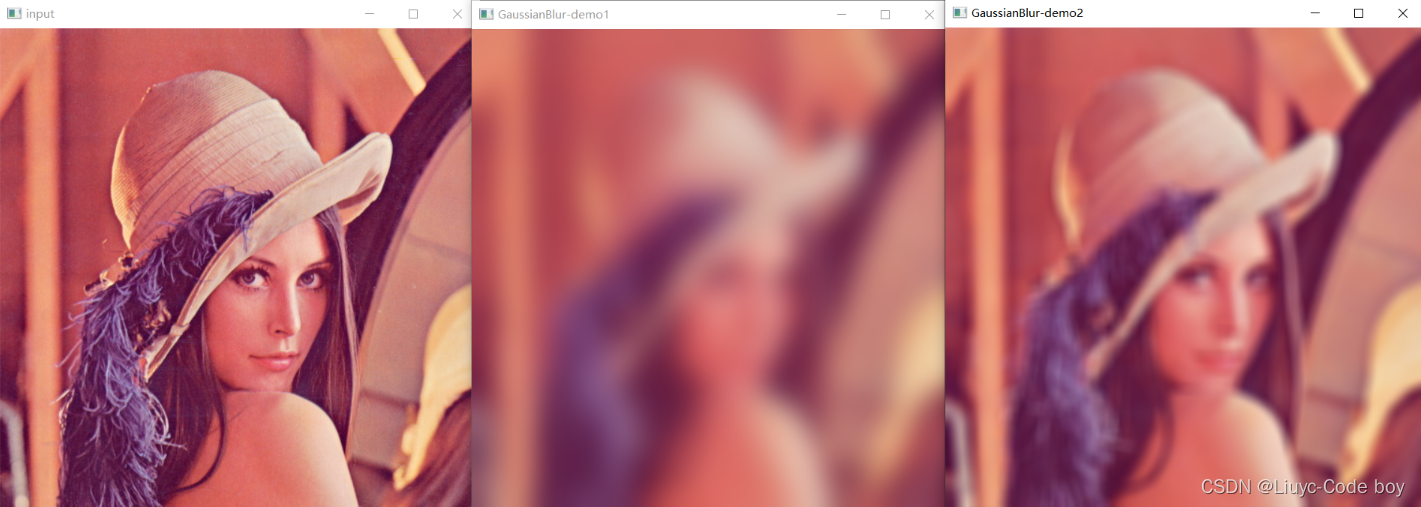
# 高斯模糊
def gaussian_blur_demo():
image = cv.imread(r"F:\python\opencv-4.x\samples\data\lena.jpg")
cv.imshow("input", image)
# 用官方自带的卷积api函数
# 窗口大小ksize为0表示从sigmaX计算生成ksize
# ksize窗口大小,必须是正数而且是奇数
g1 = cv.GaussianBlur(image, (0, 0), 15)
# ksize大于0表示从ksize计算生成sigmaX
# 此时的sigmaX由计算式子σ = 0.3*((size - 1)*0.5 - 1) + 0.8 计算为:2.6
# ksize窗口大小,必须是正数而且是奇数
g2 = cv.GaussianBlur(image, (15, 15), 15)
cv.imshow("GaussianBlur-demo1", g1)
cv.imshow("GaussianBlur-demo2", g2)
cv.waitKey(0)
cv.destroyAllWindows()
结果示例:
由于窗口大小ksize不为0时sigmaX由计算得出,所以会出现两种模糊不一致的情况。
第三节、像素重映射
1.像素重映射定义
把某个位置(x, y)的像素值赋值到另一个位置。例如(50, 50) -> (100, 100)

2.重映射函数
1. cv.remap(src, map1, map2, interpolation[, dst[, borderMode[, borderValue]]] ) -> dst
# src表示图像
# map1表示x,y方向映射规则,或者x方向映射
# Map2如果map1表示x,y映射时为空,否则表示y
# 表示映射时候的像素插值方法 支持:INTER_NEAREST 、NTER_LINEAR 、NTER_CUBIC
3.代码练习与测试
# 滚动条实现像素重定向
def trackbar_remap_callback(pos):
print(pos)
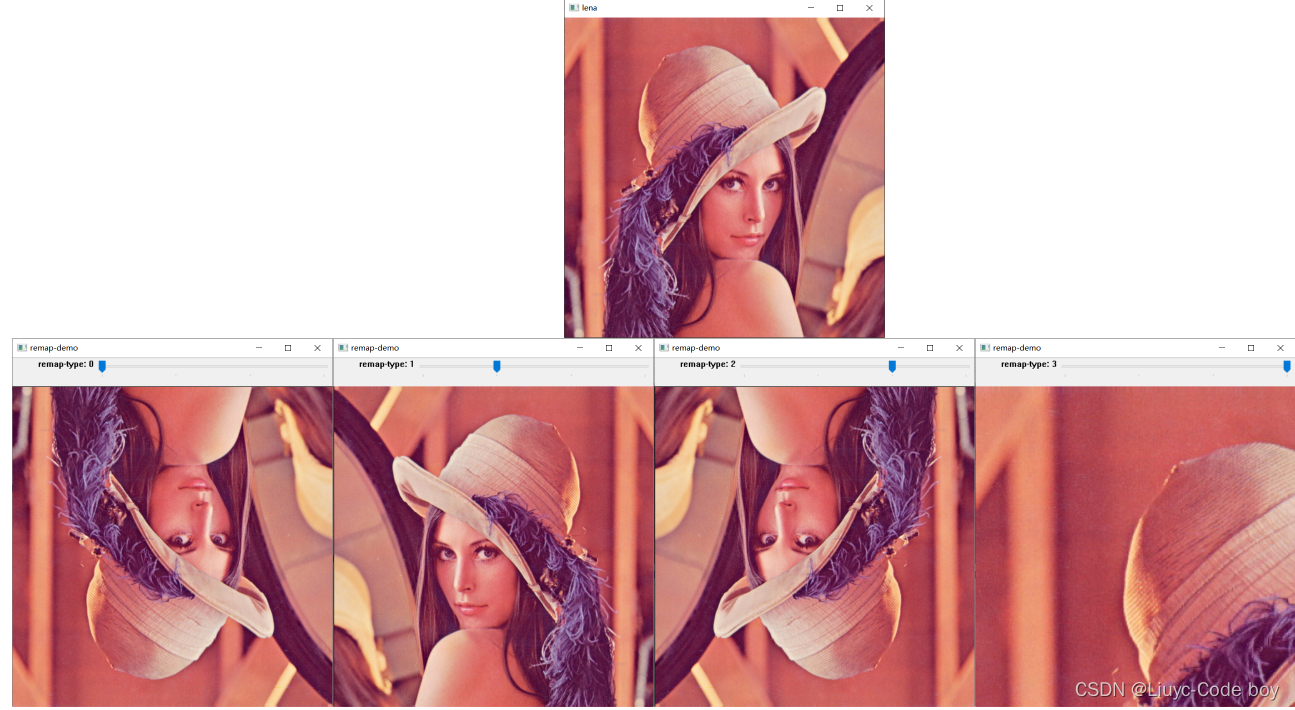
def remap_demo():
cv.namedWindow("remap-demo", cv.WINDOW_AUTOSIZE)
# 注意使用cv.createTrackbar滚动条之前线要定义注册响应trackbar_remap_callback
cv.createTrackbar("remap-type", "remap-demo", 0, 3, trackbar_remap_callback)
image = cv.imread(r"F:\python\opencv-4.x\samples\data\lena.jpg")
cv.imshow("lena", image)
h, w, c = image.shape
# map_x和map_y只存储映射规则的坐标
map_x = np.zeros((h, w), dtype=np.float32)
map_y = np.zeros((h, w), dtype=np.float32)
# 完成map_x和map_y的定义
while True:
pos = cv.getTrackbarPos("remap-type", "remap-demo")
# 倒立,x方向不变,修改y方向
if pos == 0:
# map_x.shape[0]对应h
# 一行一行的操作x
for i in range(map_x.shape[0]):
map_x[i, :] = [x for x in range(map_x.shape[1])]
# map_y.shape[1]对应w
# 一列一列的操作y
for j in range(map_y.shape[1]):
map_y[:, j] = [map_y.shape[0] - y for y in range(map_y.shape[0])]
# 镜像,x方向修改,y方向不变
elif pos == 1:
# map_x.shape[0]对应h
# 一行一行的操作x
for i in range(map_x.shape[0]):
map_x[i, :] = [map_x.shape[1] - x for x in range(map_x.shape[1])]
# map_y.shape[1]对应w
# 一列一列的操作y
for j in range(map_y.shape[1]):
map_y[:, j] = [y for y in range(map_y.shape[0])]
# 对角线对称,x方向修改,y方向也修改
elif pos == 2:
# map_x.shape[0]对应h
# 一行一行的操作x
for i in range(map_x.shape[0]):
map_x[i, :] = [map_x.shape[1] - x for x in range(map_x.shape[1])]
# map_y.shape[1]对应w
# 一列一列的操作y
for j in range(map_y.shape[1]):
map_y[:, j] = [map_y.shape[0] - y for y in range(map_y.shape[0])]
# 放大两倍,x方向修改,y方向也修改
elif pos == 3:
# map_x.shape[0]对应h
# 一行一行的操作x
for i in range(map_x.shape[0]):
map_x[i, :] = [int(x/2) for x in range(map_x.shape[1])]
# map_y.shape[1]对应w
# 一列一列的操作y
for j in range(map_y.shape[1]):
map_y[:, j] = [int(y/2) for y in range(map_y.shape[0])]
# 像素重映射remap函数
dst = cv.remap(image, map_x, map_y, cv.INTER_LINEAR)
cv.imshow("remap-demo", dst)
# 每50ms获取一次键值,ESC键值为27
c = cv.waitKey(50)
if c == 27:
break
cv.destroyAllWindows()
结果示例:
学习参考
本系列所有OpenCv相关的代码示例和内容均来自博主学习的网站:opencv_course