文章目录
- 1. 运动的描述
- 2. 拉格朗日描述下的变形
- 2.1 线元的变化
- 2.2 体元的变化
- 2.3 面元的变化
1. 运动的描述
在连续介质力学中,存在着两种对运动的描述,一种为拉格朗日描述,即通过描述每个物质点的运动来描述整个变形体的运动,也称为物质描述,另外一种为欧拉描述,即通过描述每个空间位置点物理量来描述整个变形体的运动,也称空间描述。下面我们通过一些说明来梳理清两者的内容和区别。
假设在
t
=
0
t=0
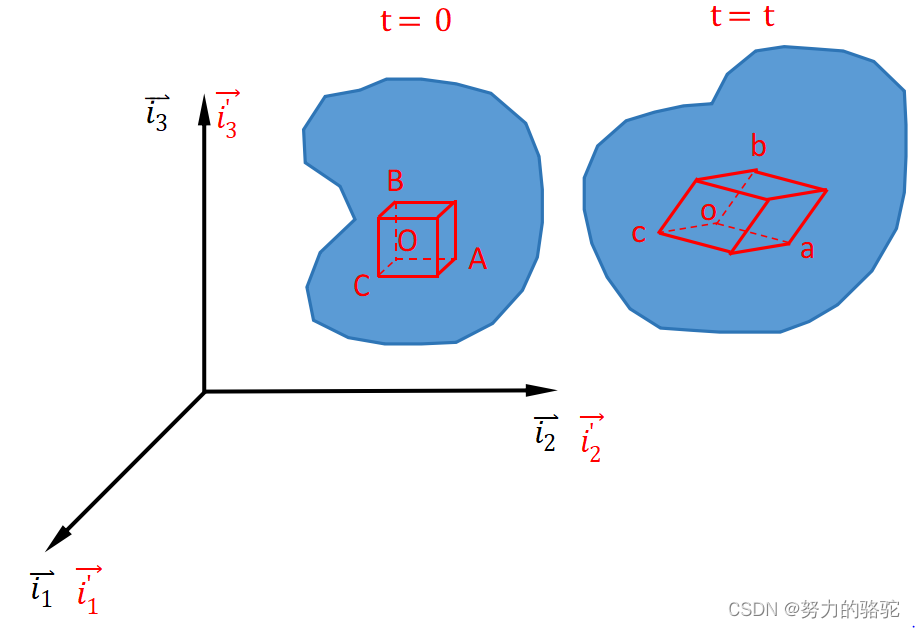
t=0时刻,变形体在空间中的位置如下图所示,其中
i
1
→
、
i
2
→
、
i
3
→
\overrightarrow{i_1}、\overrightarrow{i_2}、\overrightarrow{i_3}
i1、i2、i3 为此时空间坐标系,
i
1
′
→
、
i
2
′
→
、
i
3
′
→
\overrightarrow{i^{'}_1}、\overrightarrow{i^{'}_2}、\overrightarrow{i^{'}_3}
i1′、i2′、i3′ 为固结在此变形体上的直角坐标系,经过
t
t
t时间后,变形体发生运动和变形,其位形(位置和形状)变成下图右侧所示,此时固结于变形体的坐标系将发生角度和长度的变化,其不一定能够继续保持直角坐标系,而是成为下图右侧黄色斜体坐标系的形式。

现在我们来讨论变形体的运动,在拉格朗日描述中,我们关注的是物质点的运动,例如在上图中的P点,在
t
=
0
t=0
t=0时刻,P点在
i
1
′
→
i
2
′
→
i
3
′
→
\overrightarrow{i^{'}_1}\overrightarrow{i^{'}_2}\overrightarrow{i^{'}_3}
i1′i2′i3′ 中的坐标为
<
x
1
′
,
x
2
′
,
x
3
′
>
<x^{'}_1,x^{'}_2,x^{'}_3>
<x1′,x2′,x3′>,在
i
1
→
i
2
→
i
3
→
\overrightarrow{i_1}\overrightarrow{i_2}\overrightarrow{i_3}
i1i2i3 中的坐标可由下式确定
O
P
→
=
O
A
→
+
A
P
→
=
O
A
→
+
<
x
1
′
,
x
2
′
,
x
3
′
>
(1.1)
\overrightarrow{OP}=\overrightarrow{OA}+\overrightarrow{AP}=\overrightarrow{OA}+<x^{'}_1,x^{'}_2,x^{'}_3>\tag{1.1}
OP=OA+AP=OA+<x1′,x2′,x3′>(1.1)
在
t
t
t时刻,P点运动至P‘点,此时P‘点在固结于变形体的
i
1
′
→
i
2
′
→
i
3
′
→
\overrightarrow{i^{'}_1}\overrightarrow{i^{'}_2}\overrightarrow{i^{'}_3}
i1′i2′i3′的坐标已经不容易表示了,我们直接记录P‘在
i
1
→
i
2
→
i
3
→
\overrightarrow{i_1}\overrightarrow{i_2}\overrightarrow{i_3}
i1i2i3 空间坐标系中的位置坐标为
<
x
1
,
x
2
,
x
3
>
<x_1,x_2,x_3>
<x1,x2,x3>,显然这与P点初始坐标和时间是相关的,当取相应的坐标系使得
O
A
→
=
0
\overrightarrow{OA}=0
OA=0,且
i
1
′
→
i
2
′
→
i
3
′
→
\overrightarrow{i^{'}_1}\overrightarrow{i^{'}_2}\overrightarrow{i^{'}_3}
i1′i2′i3′ 与
i
1
→
i
2
→
i
3
→
\overrightarrow{i_1}\overrightarrow{i_2}\overrightarrow{i_3}
i1i2i3 坐标轴平行,即初始固结于变形体的坐标系和空间坐标系取一致坐标系,此时,P点初始空间坐标即为
<
x
1
′
,
x
2
′
,
x
3
′
>
<x^{'}_1,x^{'}_2,x^{'}_3>
<x1′,x2′,x3′>,那么
x
i
=
x
i
(
x
j
′
,
t
)
x_i=x_i(x^{'}_j,t)
xi=xi(xj′,t),那么此时物质点P点的位移为
u
i
=
x
i
(
x
j
′
,
t
)
−
x
i
′
(1.2)
u_i=x_i(x^{'}_j,t)-x^{'}_i\tag{1.2}
ui=xi(xj′,t)−xi′(1.2)
接下来,我们来看看欧拉描述下,变形体的运动。在欧拉描述中,我们将关注空间中的某一位置点,比如我们关注空间位置点P’点,该点的空间位置坐标为
<
x
1
,
x
2
,
x
3
>
<x_1,x_2,x_3>
<x1,x2,x3>,当
t
=
t
t=t
t=t时,有一个
t
=
0
t=0
t=0时刻处于P点的物质点此时占据该位置(当
t
=
t
′
t=t^{'}
t=t′时,占据该位置的物质可能是
t
=
0
t=0
t=0时刻的其他物质点)。因此,当
t
=
t
t=t
t=t时占据空间位置点P’点的物质,在
t
=
0
t=0
t=0时该物质点的初始坐标为
x
i
′
=
x
i
′
(
x
j
,
t
)
x^{'}_i=x^{'}_i(x_j,t)
xi′=xi′(xj,t)。那么此时,位移由下式确定
u
i
=
x
i
−
x
i
′
(
x
j
,
t
)
(1.3)
u_i=x_i-x^{'}_i(x_j,t)\tag{1.3}
ui=xi−xi′(xj,t)(1.3)
2. 拉格朗日描述下的变形
2.1 线元的变化
接下来,我们来讨论拉格朗日描述下变形体的变形。坐标系仍然是将
t
=
0
t=0
t=0时刻的固结与变形体的坐标系
i
1
′
→
i
2
′
→
i
3
′
→
\overrightarrow{i^{'}_1}\overrightarrow{i^{'}_2}\overrightarrow{i^{'}_3}
i1′i2′i3′和空间坐标系
i
1
→
i
2
→
i
3
→
\overrightarrow{i_1}\overrightarrow{i_2}\overrightarrow{i_3}
i1i2i3 选为统一坐标系,如下图所示。
此时,
t
=
0
t=0
t=0时刻的微元六面体OABC在
t
=
t
t=t
t=t时刻变成微元六面体oabc。其中设O点坐标为变形体在变形前的坐标(即在初始固结于变形体的
i
1
′
→
i
2
′
→
i
3
′
→
\overrightarrow{i^{'}_1}\overrightarrow{i^{'}_2}\overrightarrow{i^{'}_3}
i1′i2′i3′坐标系下)为
<
x
1
′
,
x
2
′
,
x
3
′
>
<x^{'}_1,x^{'}_2,x^{'}_3>
<x1′,x2′,x3′>,A点坐标为
<
x
1
′
+
d
x
1
′
,
x
2
′
+
d
x
2
′
,
x
3
′
+
d
x
3
′
>
<x^{'}_1+dx^{'}_1,x^{'}_2+dx^{'}_2,x^{'}_3+dx^{'}_3>
<x1′+dx1′,x2′+dx2′,x3′+dx3′>,经过t时间后,变形前微元OA变为微元oa,同时用变形后的坐标来表示,那么o点空间坐标为
<
x
1
,
x
2
,
x
3
>
<x_1,x_2,x_3>
<x1,x2,x3>,a点空间坐标为
<
x
1
+
d
x
1
,
x
2
+
d
x
2
,
x
3
+
d
x
3
>
<x_1+dx_1,x_2+dx_2,x_3+dx_3>
<x1+dx1,x2+dx2,x3+dx3>,上述坐标有以下关系
x
i
=
x
i
(
x
j
′
,
t
)
x
i
+
d
x
i
=
x
i
(
x
j
′
+
d
x
j
′
,
t
)
(2.1)
x_i=x_i(x^{'}_j,t)\\ x_i+dx_i=x_i(x^{'}_j+dx^{'}_j,t)\tag{2.1}
xi=xi(xj′,t)xi+dxi=xi(xj′+dxj′,t)(2.1)
那么,不难得到
d
x
i
=
x
i
(
x
j
′
+
d
x
j
′
,
t
)
−
x
i
(
x
j
′
,
t
)
=
x
i
(
x
j
′
,
t
)
+
∂
x
i
∂
x
j
′
d
x
j
′
−
x
i
(
x
j
′
,
t
)
=
∂
x
i
∂
x
j
′
d
x
j
′
(2.2)
\begin{aligned} dx_i&=x_i(x^{'}_j+dx^{'}_j,t)-x_i(x^{'}_j,t)\\ &=x_i(x^{'}_j,t)+\frac{\partial {x_i}}{\partial {x^{'}_j}}dx^{'}_j-x_i(x^{'}_j,t)\\ &=\frac{\partial {x_i}}{\partial {x^{'}_j}}dx^{'}_j\\ \end{aligned}\tag{2.2}
dxi=xi(xj′+dxj′,t)−xi(xj′,t)=xi(xj′,t)+∂xj′∂xidxj′−xi(xj′,t)=∂xj′∂xidxj′(2.2)
以
d
x
1
dx_1
dx1为例,有
d
x
1
=
∂
x
1
∂
x
1
′
d
x
1
′
+
∂
x
1
∂
x
2
′
d
x
2
′
+
∂
x
1
∂
x
3
′
d
x
3
′
(2.3)
dx_1=\frac{\partial {x_1}}{\partial {x^{'}_1}}dx^{'}_1+\frac{\partial {x_1}}{\partial {x^{'}_2}}dx^{'}_2+\frac{\partial {x_1}}{\partial {x^{'}_3}}dx^{'}_3\tag{2.3}
dx1=∂x1′∂x1dx1′+∂x2′∂x1dx2′+∂x3′∂x1dx3′(2.3)
其中第一项即为线元沿 i 1 ′ → \overrightarrow{i^{'}_1} i1′方向的伸长,第二项为线元从 i 1 ′ → \overrightarrow{i^{'}_1} i1′向 i 2 ′ → \overrightarrow{i^{'}_2} i2′转动引起 i 1 ′ → \overrightarrow{i^{'}_1} i1′投影的伸长量,第三项线元从 i 1 ′ → \overrightarrow{i^{'}_1} i1′向 i 3 ′ → \overrightarrow{i^{'}_3} i3′转动引起 i 1 ′ → \overrightarrow{i^{'}_1} i1′投影的伸长量。
同理,设B点坐标为 < x 1 ′ + δ x 1 ′ , x 2 ′ + δ x 2 ′ , x 3 ′ + δ x 3 ′ > <x^{'}_1+\delta x^{'}_1,x^{'}_2+\delta x^{'}_2,x^{'}_3+\delta x^{'}_3> <x1′+δx1′,x2′+δx2′,x3′+δx3′>,b点坐标为 < x 1 + δ x 1 , x 2 + δ x 2 , x 3 + δ x 3 > <x_1+\delta x_1,x_2+\delta x_2,x_3+\delta x_3> <x1+δx1,x2+δx2,x3+δx3>,那么有
δ x i = x i ( x j ′ + δ x j ′ , t ) − x i ( x j ′ , t ) = x i ( x j ′ , t ) + ∂ x i ∂ x j ′ δ x j ′ − x i ( x j ′ , t ) = ∂ x i ∂ x j ′ δ x j ′ (2.4) \begin{aligned} \delta x_i&=x_i(x^{'}_j+\delta x^{'}_j,t)-x_i(x^{'}_j,t)\\ &=x_i(x^{'}_j,t)+\frac{\partial {x_i}}{\partial {x^{'}_j}}\delta x^{'}_j-x_i(x^{'}_j,t)\\ &=\frac{\partial {x_i}}{\partial {x^{'}_j}}\delta x^{'}_j \end{aligned}\tag{2.4} δxi=xi(xj′+δxj′,t)−xi(xj′,t)=xi(xj′,t)+∂xj′∂xiδxj′−xi(xj′,t)=∂xj′∂xiδxj′(2.4)
设C点坐标为 < x 1 ′ + Δ x 1 ′ , x 2 ′ + Δ x 2 ′ , x 3 ′ + Δ x 3 ′ > <x^{'}_1+\Delta x^{'}_1,x^{'}_2+\Delta x^{'}_2,x^{'}_3+\Delta x^{'}_3> <x1′+Δx1′,x2′+Δx2′,x3′+Δx3′>,b点坐标为 < x 1 + Δ x 1 , x 2 + Δ x 2 , x 3 + Δ x 3 > <x_1+\Delta x_1,x_2+\Delta x_2,x_3+\Delta x_3> <x1+Δx1,x2+Δx2,x3+Δx3>,那么有
Δ x i = x i ( x j ′ + Δ x j ′ , t ) − x i ( x j ′ , t ) = x i ( x j ′ , t ) + ∂ x i ∂ x j ′ Δ x j ′ − x i ( x j ′ , t ) = ∂ x i ∂ x j ′ Δ x j ′ (2.5) \begin{aligned} \Delta x_i&=x_i(x^{'}_j+\Delta x^{'}_j,t)-x_i(x^{'}_j,t)\\ &=x_i(x^{'}_j,t)+\frac{\partial {x_i}}{\partial {x^{'}_j}}\Delta x^{'}_j-x_i(x^{'}_j,t)\\ &=\frac{\partial {x_i}}{\partial {x^{'}_j}}\Delta x^{'}_j \end{aligned}\tag{2.5} Δxi=xi(xj′+Δxj′,t)−xi(xj′,t)=xi(xj′,t)+∂xj′∂xiΔxj′−xi(xj′,t)=∂xj′∂xiΔxj′(2.5)
2.2 体元的变化
那么,变形后,六面体微元体积变化为
d
V
=
[
O
A
→
,
O
B
→
,
O
C
→
]
=
∣
d
x
1
d
x
2
d
x
3
δ
x
1
δ
x
2
δ
x
3
Δ
x
1
Δ
x
2
Δ
x
3
∣
=
∣
∂
x
1
∂
x
j
′
d
x
j
′
∂
x
2
∂
x
j
′
d
x
j
′
∂
x
3
∂
x
j
′
d
x
j
′
∂
x
1
∂
x
j
′
δ
x
j
′
∂
x
2
∂
x
j
′
δ
x
j
′
∂
x
3
∂
x
j
′
δ
x
j
′
∂
x
1
∂
x
j
′
Δ
x
j
′
∂
x
2
∂
x
j
′
Δ
x
j
′
∂
x
3
∂
x
j
′
Δ
x
j
′
∣
=
∣
d
x
1
′
d
x
2
′
d
x
3
′
δ
x
1
′
δ
x
2
′
δ
x
3
′
Δ
x
1
′
Δ
x
2
′
Δ
x
3
′
∣
⋅
∣
∂
x
1
∂
x
1
′
∂
x
2
∂
x
1
′
∂
x
3
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
2
∂
x
2
′
∂
x
3
∂
x
2
′
∂
x
1
∂
x
3
′
∂
x
2
∂
x
3
′
∂
x
3
∂
x
3
′
∣
(2.6)
dV = [\overrightarrow{OA} , \overrightarrow{OB},\overrightarrow{OC}]= \begin{vmatrix} dx_1 & dx_2 & dx_3\\ \delta x_1 & \delta x_2 & \delta x_3\\ \Delta x_1 & \Delta x_2 & \Delta x_3 \end{vmatrix}\\ =\begin{vmatrix} \frac{\partial {x_1}}{\partial {x^{'}_j}}dx^{'}_j & \frac{\partial {x_2}}{\partial {x^{'}_j}}dx^{'}_j & \frac{\partial {x_3}}{\partial {x^{'}_j}}dx^{'}_j\\ \frac{\partial {x_1}}{\partial {x^{'}_j}}\delta x^{'}_j & \frac{\partial {x_2}}{\partial {x^{'}_j}}\delta x^{'}_j & \frac{\partial {x_3}}{\partial {x^{'}_j}}\delta x^{'}_j\\ \frac{\partial {x_1}}{\partial {x^{'}_j}}\Delta x^{'}_j & \frac{\partial {x_2}}{\partial {x^{'}_j}}\Delta x^{'}_j & \frac{\partial {x_3}}{\partial {x^{'}_j}}\Delta x^{'}_j \end{vmatrix}\\ =\begin{vmatrix} dx^{'}_1 & dx^{'}_2 & dx^{'}_3\\ \delta x^{'}_1 & \delta x^{'}_2 & \delta x^{'}_3\\ \Delta x^{'}_1 & \Delta x^{'}_2 & \Delta x^{'}_3 \end{vmatrix}\cdot \begin{vmatrix} \frac{\partial {x_1}}{\partial {x^{'}_1}} & \frac{\partial {x_2}}{\partial {x^{'}_1}} & \frac{\partial {x_3}}{\partial {x^{'}_1}}\\ \frac{\partial {x_1}}{\partial {x^{'}_2}} & \frac{\partial {x_2}}{\partial {x^{'}_2}} & \frac{\partial {x_3}}{\partial {x^{'}_2}}\\ \frac{\partial {x_1}}{\partial {x^{'}_3}} & \frac{\partial {x_2}}{\partial {x^{'}_3}} & \frac{\partial {x_3}}{\partial {x^{'}_3}} \end{vmatrix}\tag{2.6}
dV=[OA,OB,OC]=
dx1δx1Δx1dx2δx2Δx2dx3δx3Δx3
=
∂xj′∂x1dxj′∂xj′∂x1δxj′∂xj′∂x1Δxj′∂xj′∂x2dxj′∂xj′∂x2δxj′∂xj′∂x2Δxj′∂xj′∂x3dxj′∂xj′∂x3δxj′∂xj′∂x3Δxj′
=
dx1′δx1′Δx1′dx2′δx2′Δx2′dx3′δx3′Δx3′
⋅
∂x1′∂x1∂x2′∂x1∂x3′∂x1∂x1′∂x2∂x2′∂x2∂x3′∂x2∂x1′∂x3∂x2′∂x3∂x3′∂x3
(2.6)
(体积为
O
A
→
\overrightarrow{OA}
OA、
O
B
→
\overrightarrow{OB}
OB、
O
C
→
\overrightarrow{OC}
OC混合积)
我们定义变形梯度矩阵为
F
=
[
∂
x
1
∂
x
1
′
∂
x
2
∂
x
1
′
∂
x
3
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
2
∂
x
2
′
∂
x
3
∂
x
2
′
∂
x
1
∂
x
3
′
∂
x
2
∂
x
3
′
∂
x
3
∂
x
3
′
]
T
(2.7)
F=\begin{bmatrix} \frac{\partial {x_1}}{\partial {x^{'}_1}} & \frac{\partial {x_2}}{\partial {x^{'}_1}} & \frac{\partial {x_3}}{\partial {x^{'}_1}}\\ \frac{\partial {x_1}}{\partial {x^{'}_2}} & \frac{\partial {x_2}}{\partial {x^{'}_2}} & \frac{\partial {x_3}}{\partial {x^{'}_2}}\\ \frac{\partial {x_1}}{\partial {x^{'}_3}} & \frac{\partial {x_2}}{\partial {x^{'}_3}} & \frac{\partial {x_3}}{\partial {x^{'}_3}} \end{bmatrix}^T\tag{2.7}
F=
∂x1′∂x1∂x2′∂x1∂x3′∂x1∂x1′∂x2∂x2′∂x2∂x3′∂x2∂x1′∂x3∂x2′∂x3∂x3′∂x3
T(2.7)
变形梯度类似小变形假设下的应变矩阵,包含了线元伸长和转动等信息。
高等数学的知识,不难得出变形梯度行列式为Jaccobi行列式,即
J
=
∣
∂
x
1
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
1
∂
x
3
′
∂
x
2
∂
x
1
′
∂
x
2
∂
x
2
′
∂
x
2
∂
x
3
′
∂
x
3
∂
x
1
′
∂
x
3
∂
x
2
′
∂
x
3
∂
x
3
′
∣
=
∣
∂
x
1
∂
x
1
′
∂
x
2
∂
x
1
′
∂
x
3
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
2
∂
x
2
′
∂
x
3
∂
x
2
′
∂
x
1
∂
x
3
′
∂
x
2
∂
x
3
′
∂
x
3
∂
x
3
′
∣
(2.8)
J=\begin{vmatrix} \frac{\partial {x_1}}{\partial {x^{'}_1}} & \frac{\partial {x_1}}{\partial {x^{'}_2}}& \frac{\partial {x_1}}{\partial {x^{'}_3}}\\ \frac{\partial {x_2}}{\partial {x^{'}_1}} & \frac{\partial {x_2}}{\partial {x^{'}_2}} & \frac{\partial {x_2}}{\partial {x^{'}_3}}\\ \frac{\partial {x_3}}{\partial {x^{'}_1}} & \frac{\partial {x_3}}{\partial {x^{'}_2}} & \frac{\partial {x_3}}{\partial {x^{'}_3}} \end{vmatrix}=\begin{vmatrix} \frac{\partial {x_1}}{\partial {x^{'}_1}} & \frac{\partial {x_2}}{\partial {x^{'}_1}} & \frac{\partial {x_3}}{\partial {x^{'}_1}}\\ \frac{\partial {x_1}}{\partial {x^{'}_2}} & \frac{\partial {x_2}}{\partial {x^{'}_2}} & \frac{\partial {x_3}}{\partial {x^{'}_2}}\\ \frac{\partial {x_1}}{\partial {x^{'}_3}} & \frac{\partial {x_2}}{\partial {x^{'}_3}} & \frac{\partial {x_3}}{\partial {x^{'}_3}} \end{vmatrix}\tag{2.8}
J=
∂x1′∂x1∂x1′∂x2∂x1′∂x3∂x2′∂x1∂x2′∂x2∂x2′∂x3∂x3′∂x1∂x3′∂x2∂x3′∂x3
=
∂x1′∂x1∂x2′∂x1∂x3′∂x1∂x1′∂x2∂x2′∂x2∂x3′∂x2∂x1′∂x3∂x2′∂x3∂x3′∂x3
(2.8)
那么上式(2.6)变为
d
V
=
J
d
V
0
(2.9)
dV=JdV_0\tag{2.9}
dV=JdV0(2.9)
2.3 面元的变化
变形后,一个面元变化为下图,其中面元 O A B \fbox{} OAB OAB存在在变形前的变形体中,也就是初始构形中,面元 o a b \fbox{} oab oab存在在变形后的变形体中,也就是即时构形中。
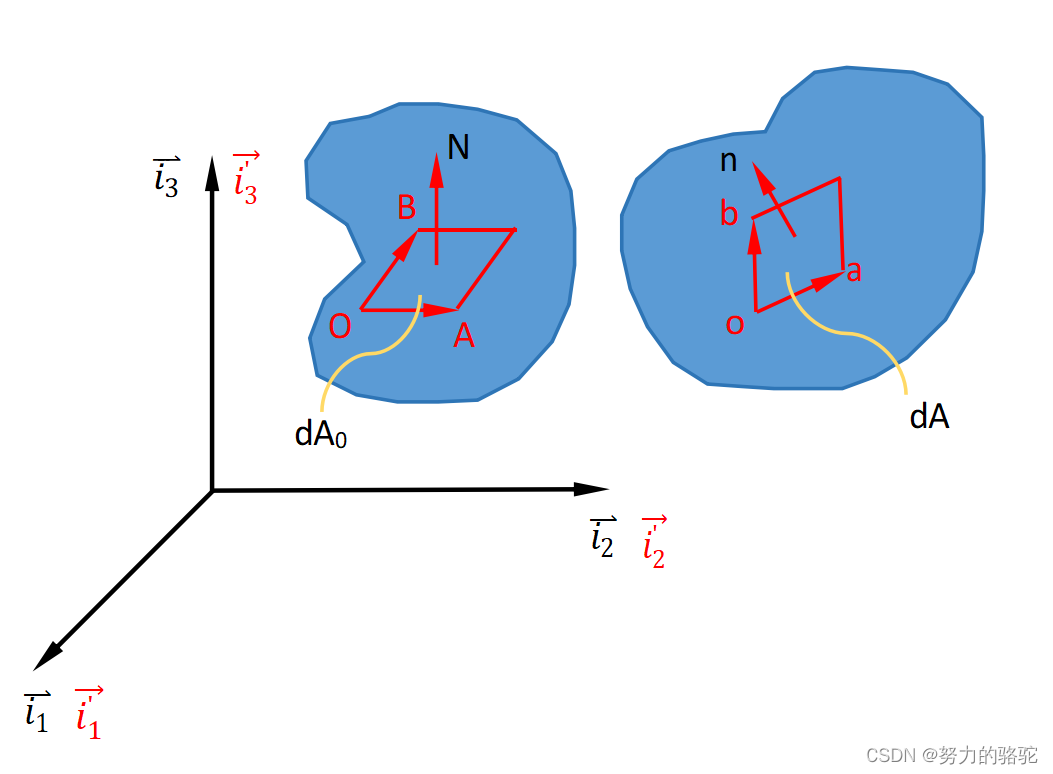
其中对有向面元有下式成立
N
→
d
A
0
=
O
A
→
⊗
O
B
→
=
∣
i
1
→
i
2
→
i
3
→
d
x
1
′
d
x
2
′
d
x
3
′
δ
x
1
′
δ
x
2
′
δ
x
3
′
∣
=
i
1
→
(
d
x
2
′
δ
x
3
′
−
d
x
3
′
δ
x
2
′
)
+
i
2
→
(
d
x
3
′
δ
x
1
′
−
d
x
1
′
δ
x
3
′
)
+
i
3
→
(
d
x
1
′
δ
x
2
′
−
d
x
2
′
δ
x
1
′
)
(2.10)
\begin{aligned} \overrightarrow{N}dA_0&=\overrightarrow{OA}\otimes\overrightarrow{OB}\\ &=\begin{vmatrix} \overrightarrow{i_1}&\overrightarrow{i_2}&\overrightarrow{i_3}\\ dx^{'}_1 & dx^{'}_2 & dx^{'}_3\\ \delta x^{'}_1 & \delta x^{'}_2 & \delta x^{'}_3 \end{vmatrix}\\ &=\overrightarrow{i_1}(dx^{'}_2\delta x^{'}_3-dx^{'}_3\delta x^{'}_2)+\overrightarrow{i_2}(dx^{'}_3\delta x^{'}_1-dx^{'}_1\delta x^{'}_3)+\overrightarrow{i_3}(dx^{'}_1\delta x^{'}_2-dx^{'}_2\delta x^{'}_1) \end{aligned} \tag{2.10}
NdA0=OA⊗OB=
i1dx1′δx1′i2dx2′δx2′i3dx3′δx3′
=i1(dx2′δx3′−dx3′δx2′)+i2(dx3′δx1′−dx1′δx3′)+i3(dx1′δx2′−dx2′δx1′)(2.10)
n
→
d
A
=
o
a
→
⊗
o
b
→
=
∣
i
1
→
i
2
→
i
3
→
d
x
1
d
x
2
d
x
3
δ
x
1
δ
x
2
δ
x
3
∣
=
i
1
→
(
d
x
2
δ
x
3
−
d
x
3
δ
x
2
)
+
i
2
→
(
d
x
3
δ
x
1
−
d
x
1
δ
x
3
)
+
i
3
→
(
d
x
1
δ
x
2
−
d
x
2
δ
x
1
)
(2.11)
\begin{aligned} \overrightarrow{n}dA&=\overrightarrow{oa}\otimes\overrightarrow{ob}\\ &=\begin{vmatrix} \overrightarrow{i_1}&\overrightarrow{i_2}&\overrightarrow{i_3}\\ dx_1 & dx_2 & dx_3\\ \delta x_1 & \delta x_2 & \delta x_3 \end{vmatrix}\\ &=\overrightarrow{i_1}(dx_2\delta x_3-dx_3\delta x_2)+\overrightarrow{i_2}(dx_3\delta x_1-dx_1\delta x_3)+\overrightarrow{i_3}(dx_1\delta x_2-dx_2\delta x_1) \end{aligned} \tag{2.11}
ndA=oa⊗ob=
i1dx1δx1i2dx2δx2i3dx3δx3
=i1(dx2δx3−dx3δx2)+i2(dx3δx1−dx1δx3)+i3(dx1δx2−dx2δx1)(2.11)
当然,上两式可以用Einstein 标记法其分量形式为
N
i
d
A
0
i
i
→
=
e
i
j
k
i
i
→
d
x
j
′
δ
x
k
′
(2.10’)
\begin{aligned} N_idA_0\overrightarrow{i_i}&=e_{ijk}\overrightarrow{i_i}dx^{'}_j\delta x^{'}_k \end{aligned} \tag{2.10'}
NidA0ii=eijkiidxj′δxk′(2.10’)
n
i
d
A
i
i
→
=
e
i
j
k
i
i
→
d
x
j
δ
x
k
(2.11’)
\begin{aligned} n_idA\overrightarrow{i_i}&=e_{ijk}\overrightarrow{i_i}dx_j\delta x_k \end{aligned} \tag{2.11'}
nidAii=eijkiidxjδxk(2.11’)
对于式(2.11‘),有
n
i
d
A
=
e
i
j
k
d
x
j
δ
x
k
=
e
i
j
k
∂
x
j
∂
x
l
′
d
x
l
′
⋅
∂
x
k
∂
x
m
′
δ
x
m
′
=
e
i
j
k
∂
x
j
∂
x
l
′
∂
x
k
∂
x
m
′
d
x
l
′
δ
x
m
′
(2.12)
\begin{aligned} n_idA&=e_{ijk}dx_j\delta x_k\\ &=e_{ijk}\frac{\partial x_j}{\partial x^{'}_l}dx^{'}_l\cdot\frac{\partial x_k}{\partial x^{'}_m}\delta x^{'}_m\\ &=e_{ijk}\frac{\partial x_j}{\partial x^{'}_l}\frac{\partial x_k}{\partial x^{'}_m}dx^{'}_l\delta x^{'}_m \end{aligned} \tag{2.12}
nidA=eijkdxjδxk=eijk∂xl′∂xjdxl′⋅∂xm′∂xkδxm′=eijk∂xl′∂xj∂xm′∂xkdxl′δxm′(2.12)
对上式左乘
∂
x
i
∂
x
p
′
\frac{\partial x_i}{\partial x^{'}_p}
∂xp′∂xi,有
∂
x
i
∂
x
p
′
n
i
d
A
=
e
i
j
k
∂
x
i
∂
x
p
′
∂
x
j
∂
x
l
′
∂
x
k
∂
x
m
′
d
x
l
′
δ
x
m
′
=
J
⋅
e
p
l
m
d
x
l
′
δ
x
m
′
=
J
N
p
d
A
0
(2.13)
\begin{aligned} \frac{\partial x_i}{\partial x^{'}_p}n_idA &=e_{ijk}\frac{\partial x_i}{\partial x^{'}_p}\frac{\partial x_j}{\partial x^{'}_l}\frac{\partial x_k}{\partial x^{'}_m}dx^{'}_l\delta x^{'}_m\\ &=J\cdot e_{plm}dx^{'}_l\delta x^{'}_m\\ &=JN_pdA_0 \end{aligned} \tag{2.13}
∂xp′∂xinidA=eijk∂xp′∂xi∂xl′∂xj∂xm′∂xkdxl′δxm′=J⋅eplmdxl′δxm′=JNpdA0(2.13)
这里需要用到
e
i
j
k
∂
x
i
∂
x
p
′
∂
x
j
∂
x
l
′
∂
x
k
∂
x
m
′
=
J
⋅
e
p
l
m
e_{ijk}\frac{\partial x_i}{\partial x^{'}_p}\frac{\partial x_j}{\partial x^{'}_l}\frac{\partial x_k}{\partial x^{'}_m}=J\cdot e_{plm}
eijk∂xp′∂xi∂xl′∂xj∂xm′∂xk=J⋅eplm
我们先将Jaccobi行列式展开
J
=
+
∂
x
1
∂
x
1
′
∂
x
2
∂
x
2
′
∂
x
3
∂
x
3
′
+
∂
x
2
∂
x
1
′
∂
x
3
∂
x
2
′
∂
x
1
∂
x
3
′
+
∂
x
3
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
2
∂
x
3
′
−
∂
x
1
∂
x
1
′
∂
x
3
∂
x
2
′
∂
x
2
∂
x
3
′
−
∂
x
2
∂
x
1
′
∂
x
1
∂
x
2
′
∂
x
1
∂
x
3
′
−
∂
x
3
∂
x
1
′
∂
x
2
∂
x
2
′
∂
x
1
∂
x
3
′
=
e
i
j
k
∂
x
i
∂
x
1
′
∂
x
j
∂
x
2
′
∂
x
k
∂
x
3
′
J=+\frac{\partial x_1}{\partial x^{'}_1}\frac{\partial x_2}{\partial x^{'}_2}\frac{\partial x_3}{\partial x^{'}_3}+\frac{\partial x_2}{\partial x^{'}_1}\frac{\partial x_3}{\partial x^{'}_2}\frac{\partial x_1}{\partial x^{'}_3}+\frac{\partial x_3}{\partial x^{'}_1}\frac{\partial x_1}{\partial x^{'}_2}\frac{\partial x_2}{\partial x^{'}_3}\\ \quad\\ -\frac{\partial x_1}{\partial x^{'}_1}\frac{\partial x_3}{\partial x^{'}_2}\frac{\partial x_2}{\partial x^{'}_3} -\frac{\partial x_2}{\partial x^{'}_1}\frac{\partial x_1}{\partial x^{'}_2}\frac{\partial x_1}{\partial x^{'}_3} -\frac{\partial x_3}{\partial x^{'}_1}\frac{\partial x_2}{\partial x^{'}_2}\frac{\partial x_1}{\partial x^{'}_3}\\ \quad\\ =e_{ijk}\frac{\partial x_i}{\partial x^{'}_1}\frac{\partial x_j}{\partial x^{'}_2}\frac{\partial x_k}{\partial x^{'}_3}
J=+∂x1′∂x1∂x2′∂x2∂x3′∂x3+∂x1′∂x2∂x2′∂x3∂x3′∂x1+∂x1′∂x3∂x2′∂x1∂x3′∂x2−∂x1′∂x1∂x2′∂x3∂x3′∂x2−∂x1′∂x2∂x2′∂x1∂x3′∂x1−∂x1′∂x3∂x2′∂x2∂x3′∂x1=eijk∂x1′∂xi∂x2′∂xj∂x3′∂xk
J
=
−
∂
x
1
∂
x
1
′
∂
x
2
∂
x
3
′
∂
x
3
∂
x
2
′
−
∂
x
2
∂
x
1
′
∂
x
3
∂
x
3
′
∂
x
1
∂
x
2
′
−
∂
x
3
∂
x
1
′
∂
x
1
∂
x
3
′
∂
x
2
∂
x
2
′
+
∂
x
1
∂
x
1
′
∂
x
3
∂
x
3
′
∂
x
2
∂
x
2
′
+
∂
x
2
∂
x
1
′
∂
x
1
∂
x
3
′
∂
x
1
∂
x
2
′
+
∂
x
3
∂
x
1
′
∂
x
2
∂
x
3
′
∂
x
1
∂
x
2
′
=
−
e
i
j
k
∂
x
i
∂
x
1
′
∂
x
j
∂
x
3
′
∂
x
k
∂
x
2
′
J=-\frac{\partial x_1}{\partial x^{'}_1}\frac{\partial x_2}{\partial x^{'}_3}\frac{\partial x_3}{\partial x^{'}_2}-\frac{\partial x_2}{\partial x^{'}_1}\frac{\partial x_3}{\partial x^{'}_3}\frac{\partial x_1}{\partial x^{'}_2}-\frac{\partial x_3}{\partial x^{'}_1}\frac{\partial x_1}{\partial x^{'}_3}\frac{\partial x_2}{\partial x^{'}_2}\\ \quad\\ +\frac{\partial x_1}{\partial x^{'}_1}\frac{\partial x_3}{\partial x^{'}_3}\frac{\partial x_2}{\partial x^{'}_2} +\frac{\partial x_2}{\partial x^{'}_1}\frac{\partial x_1}{\partial x^{'}_3}\frac{\partial x_1}{\partial x^{'}_2} +\frac{\partial x_3}{\partial x^{'}_1}\frac{\partial x_2}{\partial x^{'}_3}\frac{\partial x_1}{\partial x^{'}_2}\\ \quad\\ =-e_{ijk}\frac{\partial x_i}{\partial x^{'}_1}\frac{\partial x_j}{\partial x^{'}_3}\frac{\partial x_k}{\partial x^{'}_2}
J=−∂x1′∂x1∂x3′∂x2∂x2′∂x3−∂x1′∂x2∂x3′∂x3∂x2′∂x1−∂x1′∂x3∂x3′∂x1∂x2′∂x2+∂x1′∂x1∂x3′∂x3∂x2′∂x2+∂x1′∂x2∂x3′∂x1∂x2′∂x1+∂x1′∂x3∂x3′∂x2∂x2′∂x1=−eijk∂x1′∂xi∂x3′∂xj∂x2′∂xk
不难得出,
J
e
p
l
m
=
e
i
j
k
∂
x
i
∂
x
p
′
∂
x
j
∂
x
l
′
∂
x
k
∂
x
m
′
Je_{plm}=e_{ijk}\frac{\partial x_i}{\partial x^{'}_p}\frac{\partial x_j}{\partial x^{'}_l}\frac{\partial x_k}{\partial x^{'}_m}
Jeplm=eijk∂xp′∂xi∂xl′∂xj∂xm′∂xk
对式(2.13)左乘
∂
x
p
′
∂
x
j
\frac{\partial x^{'}_p}{\partial x_j}
∂xj∂xp′,那么有
∂
x
p
′
∂
x
j
∂
x
i
∂
x
p
′
n
i
d
A
=
∂
x
p
′
∂
x
j
J
N
p
d
A
0
⇒
δ
i
j
n
i
d
A
=
∂
x
p
′
∂
x
j
J
N
p
d
A
0
⇒
n
j
d
A
=
∂
x
p
′
∂
x
j
J
N
p
d
A
0
\begin{aligned} &\frac{\partial x^{'}_p}{\partial x_j}\frac{\partial x_i}{\partial x^{'}_p}n_idA =\frac{\partial x^{'}_p}{\partial x_j}JN_pdA_0\\ \Rightarrow &\delta_{ij}n_idA =\frac{\partial x^{'}_p}{\partial x_j}JN_pdA_0\\ \Rightarrow &n_jdA =\frac{\partial x^{'}_p}{\partial x_j}JN_pdA_0 \end{aligned}
⇒⇒∂xj∂xp′∂xp′∂xinidA=∂xj∂xp′JNpdA0δijnidA=∂xj∂xp′JNpdA0njdA=∂xj∂xp′JNpdA0
上式写成矩阵形式,如下所示
n
⋅
d
A
=
J
⋅
N
⋅
F
−
1
⋅
d
A
0
\begin{aligned} \mathbf {n}\cdot dA =J\cdot \mathbf N\cdot\mathbf {F^{-1}} \cdot dA_0 \end{aligned}
n⋅dA=J⋅N⋅F−1⋅dA0