前言
状态机在实际工作开发中应用非常广泛,在刚进入公司的时候,根据公司产品做流程图的时候,发现自己经常会漏了这样或那样的状态,导致整体流程会有问题,后来知道了状态机这样的东西,发现用这幅图就可以很清晰的表达整个状态的流转。
一口君曾经做过很多网络协议模块,很多协议的开发都必须用到状态机;一个健壮的状态机可以让你的程序,不论发生何种突发事件都不会突然进入一个不可预知的程序分支。
本篇通过C语言实现一个简单的进程5状态模型的状态机,让大家熟悉一下状态机的魅力。
什么是状态机?
定义
状态机是有限状态自动机的简称,是现实事物运行规则抽象而成的一个数学模型。
先来解释什么是“状态”( State )。现实事物是有不同状态的,例如一个LED等,就有 亮 和 灭两种状态。我们通常所说的状态机是有限状态机,也就是被描述的事物的状态的数量是有限个,例如LED灯的状态就是两个 亮和 灭。
状态机,也就是 State Machine ,不是指一台实际机器,而是指一个数学模型。说白了,一般就是指一张状态转换图。
举例
以物理课学的灯泡图为例,就是一个最基本的小型状态机
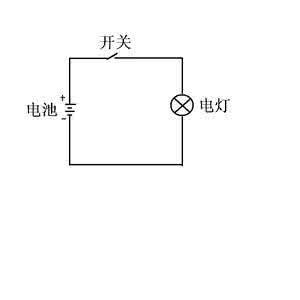
可以画出以下的状态机图
这里就是两个状态:①灯泡亮,②灯泡灭 如果打开开关,那么状态就会切换为 灯泡亮 。灯泡亮 状态下如果关闭开关,状态就会切换为 灯泡灭。
状态机的全称是有限状态自动机,自动两个字也是包含重要含义的。给定一个状态机,同时给定它的当前状态以及输入,那么输出状态时可以明确的运算出来的。例如对于灯泡,给定初始状态灯泡灭 ,给定输入“打开开关”,那么下一个状态时可以运算出来的。
四大概念
下面来给出状态机的四大概念。
State ,状态。一个状态机至少要包含两个状态。例如上面灯泡的例子,有 灯泡亮和 灯泡灭两个状态。
Event ,事件。事件就是执行某个操作的触发条件或者口令。对于灯泡,“打开开关”就是一个事件。
Action ,动作。事件发生以后要执行动作。例如事件是“打开开关”,动作是“开灯”。编程的时候,一个 Action 一般就对应一个函数。
Transition ,变换。也就是从一个状态变化为另一个状态。例如“开灯过程”就是一个变换。
状态机的应用
状态机是一个对真实世界的抽象,而且是逻辑严谨的数学抽象,所以明显非常适合用在数字领域。可以应用到各个层面上,例如硬件设计,编译器设计,以及编程实现各种具体业务逻辑的时候。
进程5状态模型
进程管理是Linux五大子系统之一,非常重要,实际实现起来非常复杂,我们来看下进程是如何切换状态的。
下图是进程的5状态模型:
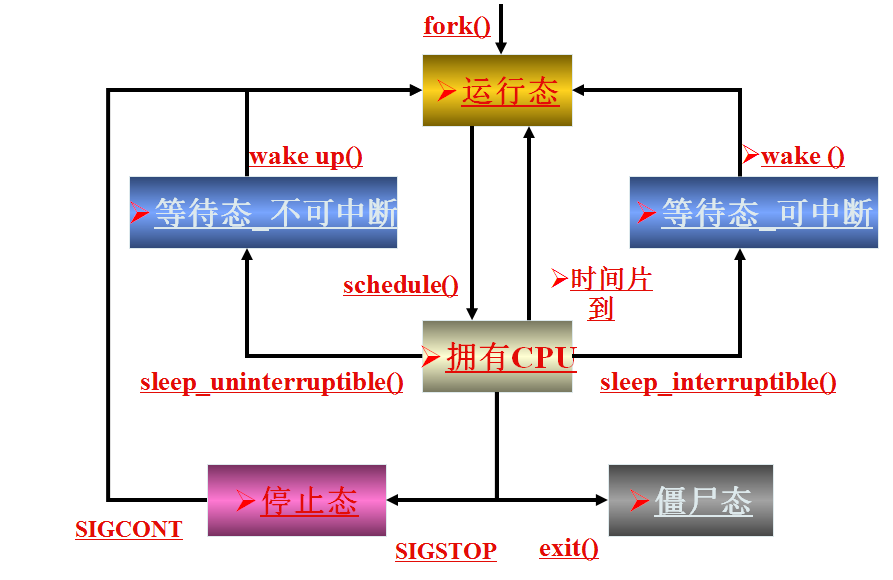
关于该图简单介绍如下:
可运行态:当进程正在被CPU执行,或已经准备就绪随时可由调度程序执行,则称该进程为处于运行状态(running)。进程可以在内核态运行,也可以在用户态运行。当系统资源已经可用时,进程就被唤醒而进入准备运行状态,该状态称为就绪态。
浅度睡眠态(可中断):进程正在睡眠(被阻塞),等待资源到来是唤醒,也可以通过其他进程信号或时钟中断唤醒,进入运行队列。
深度睡眠态(不可中断):其和浅度睡眠基本类似,但有一点就是不可由其他进程信号或时钟中断唤醒。只有被使用wake_up()函数明确唤醒时才能转换到可运行的就绪状态。
暂停状态:当进程收到信号SIGSTOP、SIGTSTP、SIGTTIN或SIGTTOU时就会进入暂停状态。可向其发送SIGCONT信号让进程转换到可运行状态。
僵死状态:当进程已停止运行,但其父进程还没有询问其状态时,未释放PCB,则称该进程处于僵死状态。
进程的状态就是按照这个状态图进行切换的。
该状态流程有点复杂,因为我们目标只是实现一个简单的状态机,所以我们简化一下该状态机如下:

要想实现状态机,首先将该状态机转换成下面的状态迁移表。

简要说明如下:假设当前进程处于running状态下,那么只有schedule事件发生之后,该进程才会产生状态的迁移,迁移到owencpu状态下,如果在此状态下发生了其他的事件,比如wake、wait_event都不会导致状态的迁移。
如上图所示:
每一列表示一个状态,每一行对应一个事件。
该表是实现状态机的最核心的一个图,请读者详细对比该表和状态迁移图的的关系。
实际场景中,进程的切换会远比这个图复杂,好在众多大神都帮我们解决了这些复杂的问题,我们只需要站在巨人的肩膀上就可以了。
实现
根据状态迁移表,定义该状态机的状态如下:
typedef enum { sta_origin=0, sta_running, sta_owencpu, sta_sleep_int, sta_sleep_unint}State;发生的事件如下:
typedef enum{ evt_fork=0, evt_sched, evt_wait, evt_wait_unint, evt_wake_up, evt_wake, }EventID;不论是状态还是事件都可以根据实际情况增加调整。
定义一个结构体用来表示当前状态转换信息:
typedef struct { State curState;//当前状态 EventID eventId;//事件ID State nextState;//下个状态 CallBack action;//回调函数,事件发生后,调用对应的回调函数}StateTransform ; 事件回调函数:实际应用中不同的事件发生需要执行不同的action,就需要定义不同的函数, 为方便起见,本例所有的事件都统一使用同一个回调函数。功能:打印事件发生后进程的前后状态,如果状态发生了变化,就调用对应的回调函数。
void action_callback(void *arg){ StateTransform *statTran = (StateTransform *)arg; if(statename[statTran->curState] == statename[statTran->nextState]) { printf("invalid event,state not change\n"); }else{ printf("call back state from %s --> %s\n", statename[statTran->curState], statename[statTran->nextState]); }}为各个状态定义迁移表数组:
/*origin*/StateTransform stateTran_0[]={ {sta_origin,evt_fork, sta_running,action_callback}, {sta_origin,evt_sched, sta_origin,NULL}, {sta_origin,evt_wait, sta_origin,NULL}, {sta_origin,evt_wait_unint, sta_origin,NULL}, {sta_origin,evt_wake_up, sta_origin,NULL}, {sta_origin,evt_wake, sta_origin,NULL},}; /*running*/StateTransform stateTran_1[]={ {sta_running,evt_fork, sta_running,NULL}, {sta_running,evt_sched, sta_owencpu,action_callback}, {sta_running,evt_wait, sta_running,NULL}, {sta_running,evt_wait_unint, sta_running,NULL}, {sta_running,evt_wake_up, sta_running,NULL}, {sta_running,evt_wake, sta_running,NULL},}; /*owencpu*/StateTransform stateTran_2[]={ {sta_owencpu,evt_fork, sta_owencpu,NULL}, {sta_owencpu,evt_sched, sta_owencpu,NULL}, {sta_owencpu,evt_wait, sta_sleep_int,action_callback}, {sta_owencpu,evt_wait_unint, sta_sleep_unint,action_callback}, {sta_owencpu,evt_wake_up, sta_owencpu,NULL}, {sta_owencpu,evt_wake, sta_owencpu,NULL},}; /*sleep_int*/StateTransform stateTran_3[]={ {sta_sleep_int,evt_fork, sta_sleep_int,NULL}, {sta_sleep_int,evt_sched, sta_sleep_int,NULL}, {sta_sleep_int,evt_wait, sta_sleep_int,NULL}, {sta_sleep_int,evt_wait_unint, sta_sleep_int,NULL}, {sta_sleep_int,evt_wake_up, sta_sleep_int,NULL}, {sta_sleep_int,evt_wake, sta_running,action_callback},}; /*sleep_unint*/StateTransform stateTran_4[]={ {sta_sleep_unint,evt_fork, sta_sleep_unint,NULL}, {sta_sleep_unint,evt_sched, sta_sleep_unint,NULL}, {sta_sleep_unint,evt_wait, sta_sleep_unint,NULL}, {sta_sleep_unint,evt_wait_unint, sta_sleep_unint,NULL}, {sta_sleep_unint,evt_wake_up, sta_running,action_callback}, {sta_sleep_unint,evt_wake, sta_sleep_unint,NULL},}; 实现event发生函数:
void event_happen(unsigned int event)功能: 根据发生的event以及当前的进程state,找到对应的StateTransform 结构体,并调用do_action()void do_action(StateTransform *statTran)功能: 根据结构体变量StateTransform,实现状态迁移,并调用对应的回调函数。#define STATETRANS(n) (stateTran_##n)/*change state & call callback()*/void do_action(StateTransform *statTran){ if(NULL == statTran) { perror("statTran is NULL\n"); return; } //状态迁移 globalState = statTran->nextState; if(statTran->action != NULL) {//调用回调函数 statTran->action((void*)statTran); }else{ printf("invalid event,state not change\n"); }}void event_happen(unsigned int event){ switch(globalState) { case sta_origin: do_action(&STATETRANS(0)[event]); break; case sta_running: do_action(&STATETRANS(1)[event]); break; case sta_owencpu: do_action(&STATETRANS(2)[event]); break; case sta_sleep_int: do_action(&STATETRANS(3)[event]); break; case sta_sleep_unint: do_action(&STATETRANS(4)[event]); break; default: printf("state is invalid\n"); break; }}测试程序:功能:
初始化状态机的初始状态为sta_origin;
创建子线程,每隔一秒钟显示当前进程状态;
事件发生顺序为:evt_fork-->evt_sched-->evt_sched-->evt_wait-->evt_wake。
读者可以跟自己的需要,修改事件发生顺序,观察状态的变化。
main.c
/*显示当前状态*/void *show_stat(void *arg){ int len; char buf[64]={0}; while(1) { sleep(1); printf("cur stat:%s\n",statename[globalState]); } }void main(void){ init_machine(); //创建子线程,子线程主要用于显示当前状态 pthread_create(&pid, NULL,show_stat, NULL); sleep(5); event_happen(evt_fork); sleep(5); event_happen(evt_sched); sleep(5); event_happen(evt_sched); sleep(5); event_happen(evt_wait); sleep(5); event_happen(evt_wake); }运行结果:
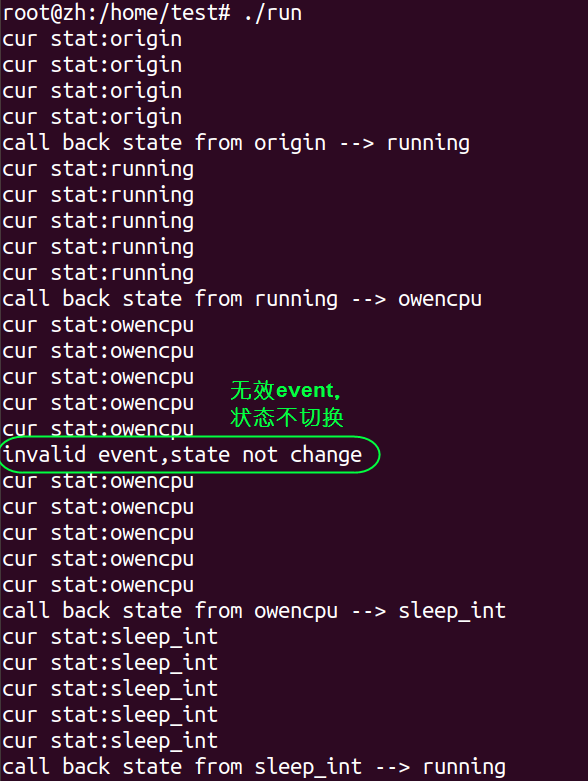
由结果可知:
evt_fork-->evt_sched-->evt_sched-->evt_wait-->evt_wake该事件发生序列对应的状态迁移顺序为:
origen-->running-->owencpu-->owencpu-->sleep_int-->running




![[Python+Django]Web学生信息管理系统数据库设计及系统实现](https://img-blog.csdnimg.cn/b215a17c6c594ff98baac085dc3ba12a.png)