一.Docker环境配置
1.简单介绍
–docker容器技术–。
简单理解:Anaconda用于隔离不同的python环境;docker可以理解成在你的机器里面安装了一个独立的系统,因此它可以隔离不同的CUDA环境,还有着独立的文件系统,防止别人删掉你的实验和环境等。
镜像(images)的意思就是静态的镜像文件;
容器(container)就是一个基于镜像的活跃着的系统,可以操作的实例,我们可以进去跑代码。
2.安装nvidia-docker
- 前置条件:你得有一张显卡。
- docker
sudo apt-get install docker。查看是否安装好:docker - Nvidia Driver. NVIDIA驱动官网。查看是否安装好:
nvidia-smi - 接下来安装
nvidia-docker。
distribution=$(. /etc/os-release;echo $ID$VERSION_ID) \
&& curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add - \
&& curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get update
sudo apt-get install -y nvidia-docker2
sudo systemctl restart docker重启一下docker- 接下来你就可以愉快的使用nvidia-docker了
3.拉取环境镜像
在此之前,我们需要了解一下docker hub的一些仓库地址。在下方给出:
Nvidia/cuda官方docker hub
PyTorch官方docker hub
基于此,我们可以去拉取官方仓库,可以在tag当中搜索我们所需要的版本,一般是选择devel版本,其中包含了C++/CUDA编译环境、视频解码、渲染等,会比较全面些。然后在docker镜像去配置我们的深度学习环境。就像下面这样:(因为DSP-SLAM的github上要求的cuda版本为11.3,所以最好跟官方一致)
sudo docker pull nvidia/cuda:11.3.1-cudnn8-devel-ubuntu18.04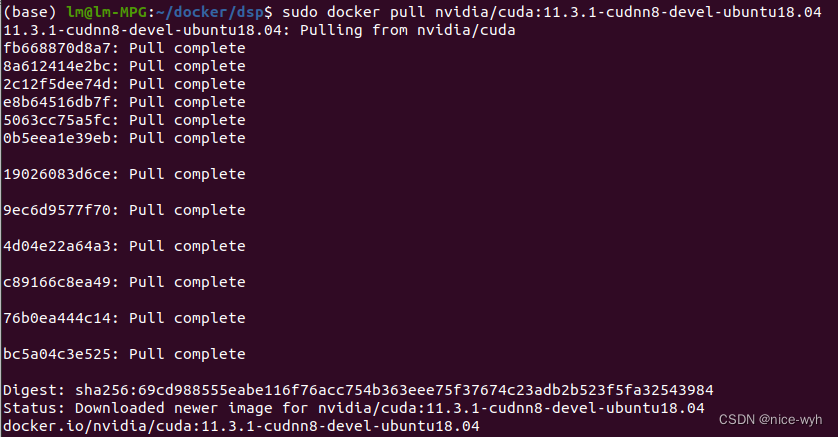
如果想删除多余的docker image,可以使用指令
sudo docker rmi -f <id>2.创建容器
sudo docker run -itd --runtime=nvidia --gpus all --name dspslam -v /home/lm/docker/dspslam:/home/lm/docker/dspslam --net=host --env="DISPLAY" --volume="$HOME/.Xauthority:/root/.Xauthority:rw" -e NVIDIA_DRIVER_CAPABILITIES=compute,utility,graphics -e NVIDIA_VISIBLE_DEVICES=all --privileged=true 9ac63d269265 /bin/bash这个参数有点多,依次解释一下:
- -it必备 d表示在背景里运行;
- -v 磁盘挂载 本地绝对路径:容器的绝对路径;
- --name 给你的container取个响亮的芳名;
- --runtime 表示启用nvidia
- --gpus 表示可以使用gpu,且为all
- -e NVIDIA_DRIVER_CAPABILITIES=compute,utility,graphics,标红的三个缺一不可,我当初就是因为缺了第三个graphics,导致Pangolin的X11报错,OpenGL服务用不了
- 其他参数有的是开启GUI的,有的是支持英伟达的,大家可以自行搜索,总之按照上面的指令,就会构建好一个可以使用nvidia的容器
基于ubuntu18.04建立容器,并开启GUI功能。
进入容器后,会在root命令下,到此我们便得到了一个纯净的ubuntu环境。
可以使用sudo docker ps查看正在运行的容器,sudo docker ps -a查看所有容器
当我想要退出时,输入exit退出容器,然后使用sudo docker stop dspslam来停止容器,当我想再次进入容器时,使用sudo docker start dspslam启动容器,再使用sudo docker exec -it dspslam bash进入容器
验证显卡是否可用
nvidia-smi
至此,你就获得了一个具有nvidia driver和cuda支持的docker.
查看当前cuda版本
cd /usr/local
ls
可以看到版本确为11.3
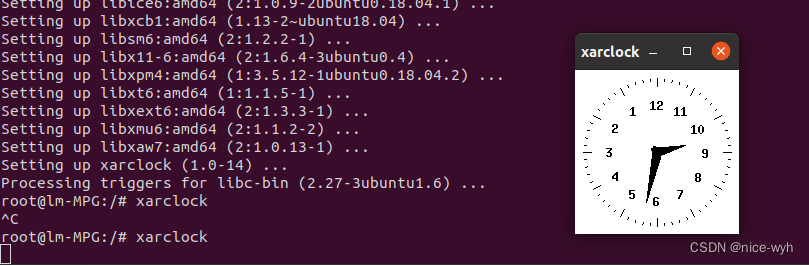
主机在每次开机之后都需要运行下面的指令,来指定允许连接的主机。
xhost +运行之后,在docker容器内安装xarclock,运行指令
apt-get install xarclock
xarclock运行后,会出现一个小时钟,表明docker内可以开启GUI服务。
二.Dsp-slam环境配置
1.准备代码
下载开源代码
git clone --recursive https://github.com/JingwenWang95/DSP-SLAM.git
安装基础包
apt-get install gcc g++ cmake git
安装eigen3.4.0
因为要求版本为3.4.0,所以不建议用apt安装,这里选择源码编译安装,使用以下指令下载源码
git_clone "git clone --branch=3.4.0 --depth=1 https://gitlab.com/libeigen/eigen.git"
之后开始编译
cd eigen && mkdir build && cd build
cmake ..
make
make install进入到/usr/local/include下,查看是否安装成功
2.安装Anaconda
提前准备好安装包
sh Anaconda3-5.3.1-Linux-x86_64.sh按照步骤安装即可

之后退出docker重新进入,即可自动进入base环境
3.安装Pangolin v0.6
安装依赖
apt-get install libglew-dev libgtk2.0-dev pkg-config libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
apt-get install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev
apt-get install libpng-dev配置并编译
cd Pangolin-0.6
mkdir build && cd build
cmake -DCPP11_NO_BOOST=1 ..
make -j
make install4.安装OpenCV3.4.1
接下来去opencv官网找到opencv3.4.1的源码包
下载下来后,进行编译安装,首先需要安装一些依赖和工具
apt-get install build-essential libgtk2.0-dev libgtk-3-dev libjpeg-dev libpng-dev libvtk7-dev libtiff5-dev libjasper-dev libopenexr-dev libtbb-dev
其中安装libjasper-dev时会报错,找不到软件包
因此,首先
vi /etc/apt/sources.list在最后一行加上
deb http://security.ubuntu.com/ubuntu xenial-security main然后
apt-get update
apt-get install libjasper-dev即可
依赖安装好后,进行正式编译安装
mkdir build && cd buildcmake --DCMAKE_BUILD_TYPE=Release -DWITH_CUDA=OFF -DBUILD_DOCS=OFF -DBUILD_PACKAGE=OFF -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF -DBUILD_opencv_apps=OFF -DBUILD_opencv_calib3d=ON -DBUILD_opencv_cudaoptflow=OFF -DBUILD_opencv_dnn=OFF -DBUILD_opencv_dnn_BUILD_TORCH_IMPORTER=OFF -DBUILD_opencv_features2d=ON -DBUILD_opencv_flann=ON -DBUILD_opencv_java=ON -DBUILD_opencv_objdetect=ON -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF -DBUILD_opencv_photo=ON -DBUILD_opencv_stitching=ON -DBUILD_opencv_superres=ON -DBUILD_opencv_shape=ON -DBUILD_opencv_videostab=OFF -DBUILD_PROTOBUF=OFF -DWITH_1394=OFF -DWITH_GSTREAMER=OFF -DWITH_GPHOTO2=OFF -DWITH_MATLAB=OFF -DWITH_NVCUVID=OFF -DWITH_OPENCL=OFF -DWITH_OPENCLAMDBLAS=OFF -DWITH_OPENCLAMDFFT=OFF -DWITH_TIFF=OFF -DWITH_VTK=OFF -DWITH_WEBP=OFF ..make -j6
make install查看是否安装成功
pkg-config --modversion opencv

5.安装g2o、DBoW2
进入到/dspslam/DSP-SLAM-master/Thirdparty文件夹下,找到g2o、DBoW2的文件夹,分别进行安装
安装g2o
cd g2o
mkdir build && cd build
cmake -DEigen3_DIR="$/usr/local/share/eigen3/cmake" ..
make -j6安装DBoW2
cd DBoW2
mkdir build && cd build
cmake ..
make -j66.创建python虚拟环境
按照常规来说,应该是按照build_cuda113.sh的内容来以此执行的,但是我遇到了网络连接的问题,因此我修改了coda的下载地址,更改为清华源了
参考链接
接着创建一个虚拟环境,命名为dspslam
conda create --name=dspslam python=3.7接着按照environment_cuda113.yml文件的内容,挨个安装(使用conda install 安装dependencies, pip insatll pip部分),但是安装到pytorch时,遇到问题,因此果断选择采用离线安装包的方式进行安装,根据版本要求,分别下载以下三个(因为其他都能正常装),地址为
torch.whl地址
torchvision.whl地址
cudatoolkit地址

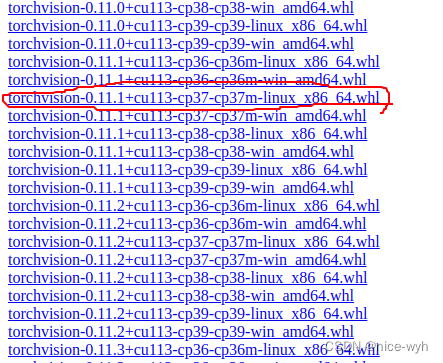

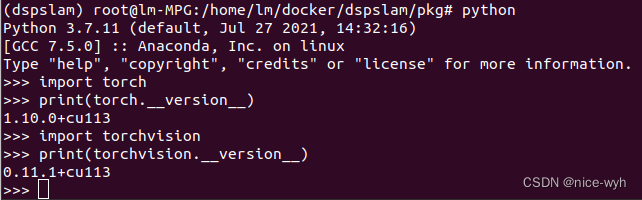
之后直接pip install xxx.whl和 conda install --offline xxx.tar.bz2即可,进行验证
7.安装mmdetection and mmdetection3d
pip install pycocotools==2.0.1
pip install mmcv-full==1.4.0 -f https://download.openmmlab.com/mmcv/dist/cu113/torch1.10.0/index.html
pip install mmdet==2.14.0
pip install mmsegmentation==0.14.1然后进入DSP-SLAM/Thirdparty/下,运行指令
git clone https://github.com/JingwenWang95/mmdetection3d.git
然后
cd mmdetection3d
pip install -v -e .
中间会频繁出现几个warning警告,但是无妨,最终成功安装!
8.编译DSP-SLAM
编译DSP-SLAM
按照build_cuda113.sh的内容,首先进入DSP-SLAM目录下
mkdir build && cd buildsh文件里说要运行下面两条命令,是有关pybind11的,我仔细查了一下,发现他的意思就是获得当前conda虚拟环境的路径,因此我对他进行了修改(不需要执行下面两句,而是修改cmake..的参数)
conda_python_bin='which python'
conda_env_dir="$(dirname "$(dirname "$conda_python_bin")")"
编译DSP-SLAM(修改后的conda_env_dir我直接索引到他的路径)
cmake -DEigen3_DIR="/usr/local/share/eigen3/cmake" -DPYTHON_LIBRARIES="/root/anaconda3/envs/dspslam/lib/libpython3.7m.so" -DPYTHON_INCLUDE_DIRS="/root/anaconda3/envs/dspslam/include/python3.7m" ..会出现warning,应该不会出现问题,继续make
准备weights和data
新建weights和data文件夹,并下载相关weights
下载链接

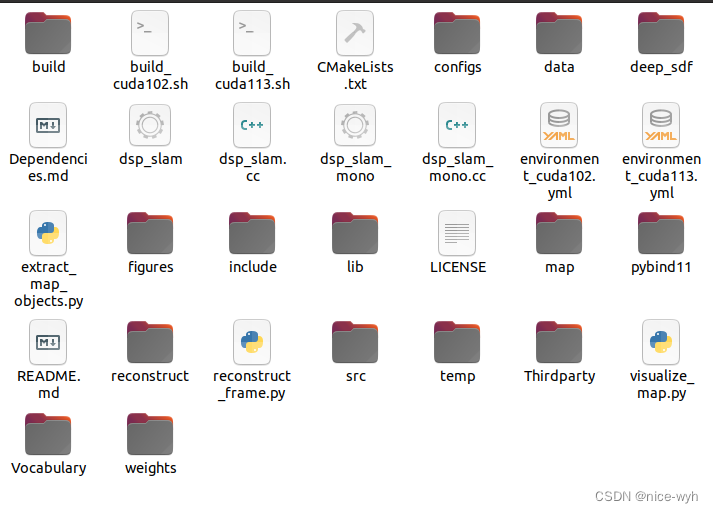
最后的DSP-SLAM文件结构如下
尝试运行代码
./dsp_slam Vocabulary/ORBvoc.bin configs/KITTI04-12.yaml data/kitti/07 map/kitti/
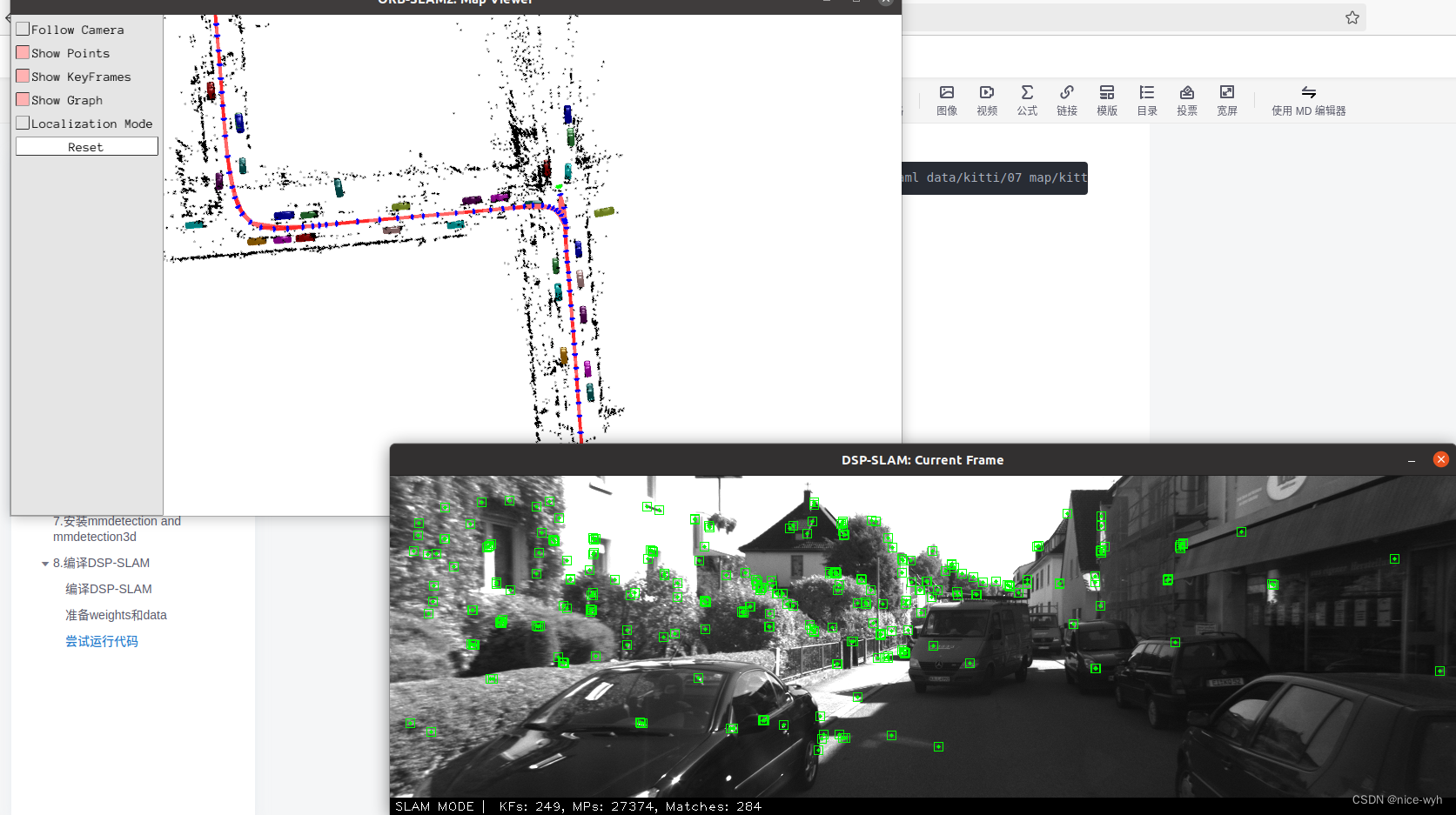
成功运行!!!
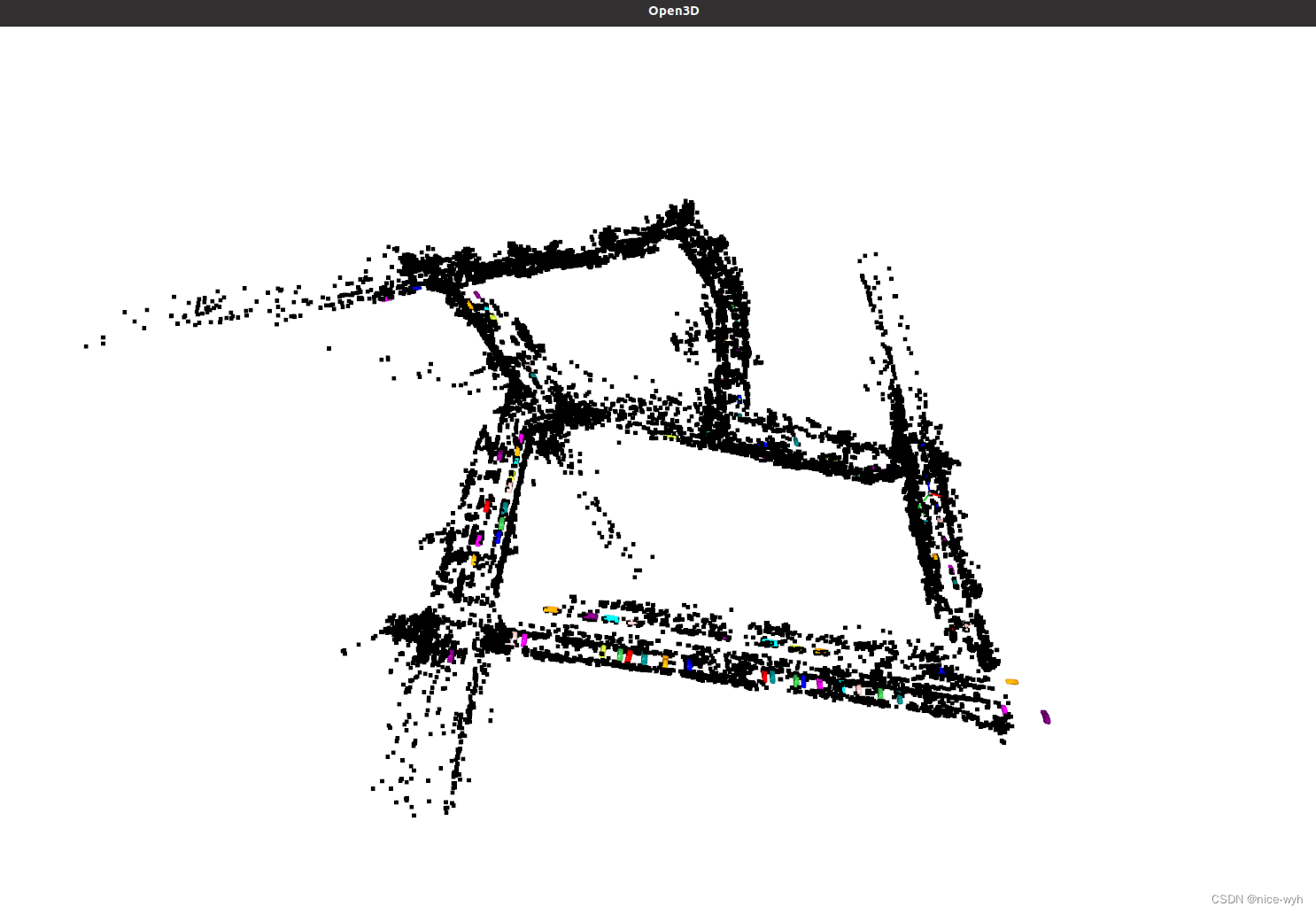
Save and visualize map
会得到三个文件
之后,根据脚本可视化
python3 extract_map_objects.py --config configs/config_kitti.json --map_dir map/kitti --voxels_dim 64
它将在map/kitti下创建一个新的目录,并将所有的网格和物体姿态存储在那里。然后,你可以通过运行以下命令来可视化重建的关节地图:
python3 visualize_map.py --config configs/config_kitti.json --map_dir map/kitti