1.图像的读取与显示
1.1 加载并显示一张图片
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace cv;
using namespace std;
int main(int argc,char** argv){
Mat src=imread("sonar.jpg");//读取图像
if(src.empty()){
printf("Could not open or find the image\n");
return -1;
}
namedWindow("test opencv setup",CV_WINDOW_AUTOSIZE);
imshow("test opencv setup",src);//显示图像,窗口命名为test opencv setup
waitKey(0);//显示按键,0表示无限等待
return 0;
}
1.2 窗口大小自由调整
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace cv;
using namespace std;
int main(int argc,char** argv){
Mat src=imread("sonar.jpg");//读取图像
if(src.empty()){
printf("Could not open or find the image\n");
return -1;
}
namedWindow("test opencv setup",WINDOW_FREERATIO);//创建一个窗口,窗口名为“test opencv setup“,窗口属性为自由比例
imshow("test opencv setup",src);//显示图像
waitKey(0);//显示按键,0表示无限等待
destroyAllWindows();
return 0;
}
1.3 图像的读取方式
IMREAD_UNCHANGED:读取原图像,包括alpha通道
IMREAD_GRAYSCALE:以灰度图像读取
IMREAD_COLOR:以彩色图像读取
IMREAD_ANYDEPTH:以原图像深度读取
IMREAD_ANYCOLOR:以原图像颜色格式读取
IMREAD_LOAD_GDAL:使用GDAL读取图像
IMREAD_REDUCED_GRAYSCALE_2:以1/2的灰度图像读取
IMREAD_REDUCED_COLOR_2:以1/2的彩色图像读取
IMREAD_REDUCED_GRAYSCALE_4:以1/4的灰度图像读取
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace cv;
using namespace std;
int main(int argc,char** argv){
Mat src=imread("sonar.jpg",IMREAD_GRAYSCALE);//读取图像
if(src.empty()){
printf("Could not open or find the image\n");
return -1;
}
namedWindow("test opencv setup",WINDOW_AUTOSIZE);//创建一个窗口,窗口名为“test opencv setup“,窗口属性为自由比例
imshow("test opencv setup",src);//显示图像
waitKey(0);//显示按键,0表示无限等待
destroyAllWindows();
return 0;
}
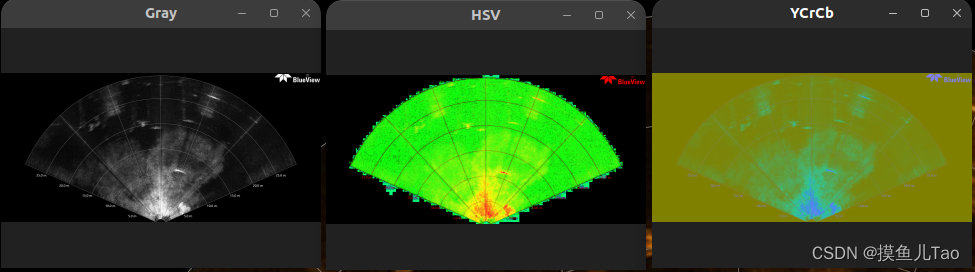
1.4 图像色彩空间转换
Testdemo.cpp
#include"Testdemo.h"
TestDemo::TestDemo()
{}
TestDemo::~TestDemo()
{}
void TestDemo::colorSpace_demo(Mat& image)
{
cv::Mat gray,hsv,ycrcb;
//创建三个窗口,窗口名分别为 “Gray” “HSV” “YCrCb”,窗口属性为自由比例
namedWindow("Gray",WINDOW_FREERATIO);
namedWindow("HSV",WINDOW_FREERATIO);
namedWindow("YCrCb",WINDOW_FREERATIO);
//转换图像颜色空间
cvtColor(image,gray,COLOR_BGR2GRAY);//将图像转换为灰度图
cvtColor(image,hsv,COLOR_BGR2HSV);//将图像转化为HSV图像
cvtColor(image,ycrcb,COLOR_BGR2YCrCb);//将图像转化为YCrCb图像
//显示图像
imshow("Gray",gray);
imshow("HSV",hsv);
imshow("YCrCb",ycrcb);
//保存转换后的图像
imwrite("/home/liutao/Desktop/222/gray.png",gray);
imwrite("/home/liutao/Desktop/222/hsv.png",hsv);
imwrite("/home/liutao/Desktop/222/ycrcb.png",ycrcb);
}
Testdemo.h
#pragma once
#include<opencv2/opencv.hpp>
using namespace cv;
class TestDemo
{
public:
TestDemo();
~TestDemo();
void colorSpace_demo(Mat& image); //颜色空间转换、传入图像
};
main.cpp
#include<iostream>
#include<opencv2/opencv.hpp>
#include"Testdemo.h"
#include"test.h"
using namespace std;
int main(int argc,char** argv){
Mat img =imread("/home/liutao/Desktop/222/sonar.jpg");
if(img.empty())
{
cout<<"could not open or find the image"<<endl;
return -1;
}
namedWindow("Image",WINDOW_AUTOSIZE);
imshow("Image",img);
TestDemo testdemo;
testdemo.colorSpace_demo(img);
waitKey(0);
destroyAllWindows();
return 0;
}
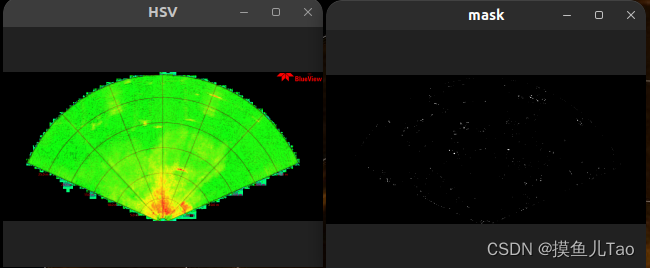
1.5 inrange
Scalar(B,G.R,C) Blue,Green,Red,Channels
Scalar(H,S.V) hue色调,saturation饱和度,value亮度
Scalar lower = Scalar(hmin, smin, vmin); // 效果等同于 Scalar lower = { hmin, smin, vmin}
Scalar upper = Scalar(hmax, smax,vmax);
inRange(imgHSV, lower, upper, mask);
void TestDemo::inrange_colorSpace_demo(Mat& image)
{
cv::Mat hsv;
cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV); // 将图像转换为 HSV 图
namedWindow("hsv", WINDOW_FREERATIO);
imshow("hsv", hsv);
cv::Mat mask;
//提取偏红色区域
inRange(hsv, cv::Scalar(0, 43, 46), cv::Scalar(10, 255, 255), mask);
// 提取指定色彩范围的区域,参数为输入图像、颜色下限、颜色上限、输出图像
cv::namedWindow("mask", cv::WINDOW_FREERATIO);
cv::imshow("mask", mask);
}
1.6 数据访问
void TestDemo::mat_demo()
{
Mat m1 = Mat::zeros(3, 3, CV_8UC3); // 创建一个 3x3 的 3 通道图像,像素值为 0
//输出行数、列数、通道数
std::cout << "m1:\n" << m1 << std::endl;
std::cout << "m1.rows: " << m1.rows << std::endl;
std::cout << "m1.cols: " << m1.cols << std::endl;
std::cout << "m1.channels: " << m1.channels() << std::endl;
}
用Mat创建一个底色为白色图像,通道为RGB
//通过scalar创建一个 255x255 的 3 通道图像,像素值为 255
Mat m3 = Mat(255, 255, CV_8UC3, Scalar(255, 255, 255));
std::cout << "m3:\n" << m3 << std::endl;
imshow("m3", m3);
cv::waitKey(0);
cv::destroyAllWindows();
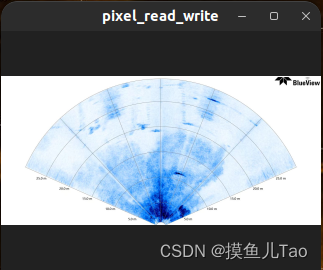
1.7图像像素访问
void TestDemo::pixel_read_write(Mat& image)
{
int width = image.cols; // 获取图像宽度
int height = image.rows; // 获取图像高度
int channels = image.channels(); // 获取图像通道数
//for (int row = 0; row < height; row++)
//{
// for (int col = 0; col < width; col++)
// {
// if (channels == 1) //单通道,图像为灰度
// {
// int pv = image.at<uchar>(row, col); // 获取像素值,at<uchar>表示获取灰度图像的像素值,取值范围为0-255
// image.at<uchar>(row, col) = 255 - pv; // 修改像素值,取反
// }
// if (channels == 3) //三通道图像,彩色图像
// {
// Vec3b pv_bgr = image.at<Vec3b>(row, col); // 获取像素值,at<Vec3b>表示获取彩色图像的像素值,bgr通道
// image.at<Vec3b>(row, col)[0] = 255 - pv_bgr[0]; // 修改像素值,取反,Vec3b[0]表示B通道
// image.at<Vec3b>(row, col)[1] = 255 - pv_bgr[1]; // 修改像素值,取反,G通道
// image.at<Vec3b>(row, col)[2] = 255 - pv_bgr[2]; // 修改像素值,取反,R通道
// }
// }
//}
//通过指针访问像素
//指针访问像素
for (int row = 0; row < height; row++)
{
uchar* data = image.ptr<uchar>(row); // 获取图像第 row 行的指针
for (int col = 0; col < width; col++)
{
if (channels == 1) //单通道,图像为灰度
{
*data++ = 255 - *data; // 修改像素值,取反
}
if (channels == 3) //三通道图像,彩色图像
{
*data++ = 255 - *data; // 修改像素值,取反,B通道
*data++ = 255 - *data; // 修改像素值,取反,G通道
*data++ = 255 - *data; // 修改像素值,取反,R通道
}
}
}
namedWindow("pixel_read_write", WINDOW_FREERATIO);
imshow("pixel_read_write", image);
}
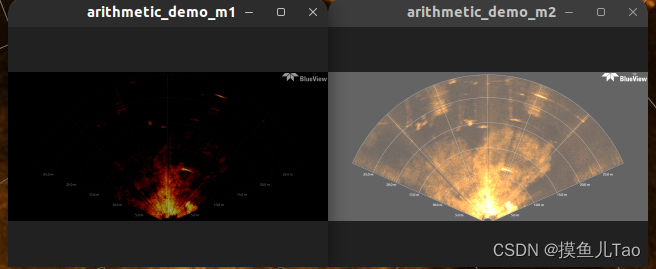
1.8 图像的算数操作
void TestDemo::arithmetic_demo(Mat& image)
{
Mat m1;
Mat m2;
m1 = image - Scalar(100, 100, 100); // 图像减法
m2 = image + Scalar(100, 100, 100); // 图像加法
namedWindow("arithmetic_demo_m1", WINDOW_FREERATIO);
imshow("arithmetic_demo_m1", m1);
namedWindow("arithmetic_demo_m2", WINDOW_FREERATIO);
imshow("arithmetic_demo_m2", m2);
}
当进行像素值操作后,有些值超过了255(对于8位图像,像素值的范围是0到255)时,可以选择进行饱和操作(saturate),将超过范围的值强制截断到合法范围内。OpenCV 中的 cv::saturate_cast 函数可以完成这个任务
img=img * 2;//进行一些操作,可能导致像素值超过255
//将图像像素值饱和到0到255的范围
int height=img.rows;
int width =img.cols;
int channels=img.channels();
for(int row=0;row<height;row++){
uchar* data = img.ptr<uchar>(row);
for(int col = 0;col<width;col++){
*data++=saturate_cast<uchar>(*data);
}
}
namedWindow("SATURATE_CAST",WINDOW_FREERATIO);
imshow("SATURATE_CAST",img);
1.9 图像像素逻辑操作
void TestDemo::bitwise_demo(Mat& image1, Mat& image2)
{
Mat m1 = Mat::zeros(Size(256, 256), CV_8UC3);
Mat m2 = Mat::zeros(Size(256, 256), CV_8UC3);
// image1 image2
//创建矩形
//线宽-1表示填充,线宽>0表示边框宽度
rectangle(m1, Rect(100, 100, 80, 80), Scalar(255, 255, 0), -1, LINE_8, 0);
// 矩形填充,颜色为黄色,线宽为-1,表示填充,线型为8连通,矩形左上角坐标为(100,100),宽高为80
rectangle(m2, Rect(150, 150, 80, 80), Scalar(0, 255, 255), -1, LINE_8, 0);
// 矩形填充,颜色为青色,线宽为-1,表示填充,线型为8连通,矩形左上角坐标为(150,150),宽高为80
imshow("m1", m1);
imshow("m2", m2);
Mat dst_and, dst_or, dst_not, dst_xor;
bitwise_and(m1, m2, dst_and); // 与操作
bitwise_or(m1, m2, dst_or); // 或操作
bitwise_not(m1, dst_not); // 非操作
bitwise_xor(m1, m2, dst_xor); // 异或操作
imshow("dst_and", dst_and);
imshow("dst_or", dst_or);
imshow("dst_not", dst_not);
imshow("dst_xor", dst_xor);
}

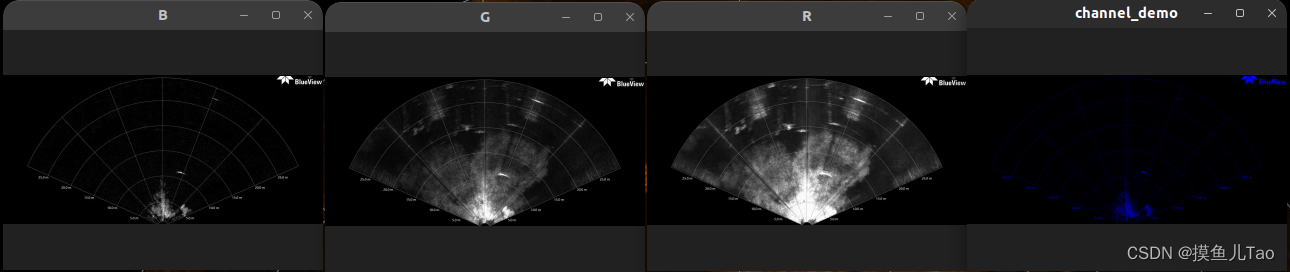
1.10通道分离与合
void TestDemo::channel_demo(Mat& image)
{
Mat bgr[3];
split(image, bgr); // 通道分离
namedWindow("B", WINDOW_FREERATIO);
namedWindow("G", WINDOW_FREERATIO);
namedWindow("R", WINDOW_FREERATIO);
imshow("B", bgr[0]);
imshow("G", bgr[1]);
imshow("R", bgr[2]);
Mat dst;
bgr[1] = 0; // 将 G 通道置为 0
bgr[2] = 0; // 将 R 通道置为 0
merge(bgr, 3, dst); // 通道合并
namedWindow("channel_demo", WINDOW_FREERATIO);
imshow("channel_demo", dst);
}
1.11 混合图像
//混合图像
Mat src1 = image;
Mat src2 = dst;
Mat dst2;
addWeighted(src1, 0.5, src2, 0.5, 0, dst2); // 图像混合
namedWindow("channel_demo2", WINDOW_FREERATIO);
imshow("channel_demo2", dst2);

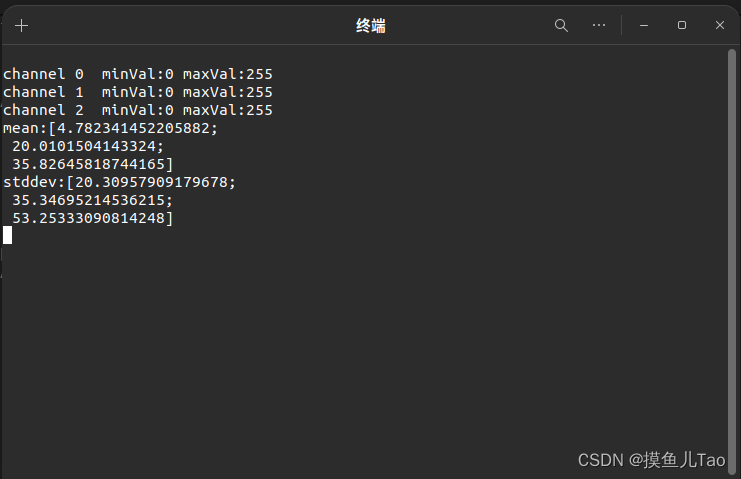
1.12 像素值统计
void TestDemo::pixel_statistics(Mat& image){
double minVal,maxVal;
Point minLoc,maxLoc;
vector<Mat>mv;
split(image,mv);//通道分离
for(int i=0;i<mv.size();i++)
{
minMaxLoc(mv[i],&minVal,&maxVal,&minLoc,&maxLoc);
//src:输入数组或者向量,必须包含至少一个元素。
// minVal:可选的输出参数,用于存储最小值的实际值。如果不需要这个值,可以设为0。
// maxVal:可选的输出参数,用于存储最大值的实际值。如果不需要这个值,可以设为0。
// minLoc:可选的输出参数,用于存储最小值的位置。如果不需要这个值,可以设为0。
// maxLoc:可选的输出参数,用于存储最大值的位置。如果不需要这个值,可以设为0。
// mask:可选的掩码,其大小和类型必须与 src 相同。如果指定了此参数,那么函数只查找具有非零掩码值的元素。
cout<<"channel "<<i<<" minVal:"<<minVal<<" maxVal:"<<maxVal<<endl;
}
Mat mean,stddev;
meanStdDev(image,mean,stddev);
cout<<"mean:"<<mean<<endl<<"stddev:"<<stddev<<endl;
}
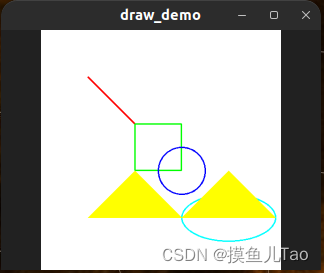
1.13 几何形状绘制
void TestDemo::draw_demo()
{
//创建一个白色底板的图像
Mat image = Mat::zeros(Size(512, 512), CV_8UC3);
image = Scalar(255, 255, 255);
//绘制直线
line(image, Point(100, 100), Point(200, 200), Scalar(0, 0, 255), 2, LINE_8, 0);
// 直线绘制,颜色为红色,线宽为2,线型为8连通,起点坐标为(100,100),终点坐标为(200,200)
//绘制矩形
rectangle(image, Rect(200, 200, 100, 100), Scalar(0, 255, 0), 2, LINE_8, 0);
// 矩形绘制,颜色为绿色,线宽为2,线型为8连通,矩形左上角坐标为(200,200),宽高为100
//绘制圆形
circle(image, Point(300, 300), 50, Scalar(255, 0, 0), 2, LINE_8, 0);
// 圆形绘制,颜色为蓝色,线宽为2,线型为8连通,圆心坐标为(300,300),半径为50
//绘制椭圆
ellipse(image, Point(400, 400), Size(100, 50), 0, 0, 360, Scalar(255, 255, 0), 2, LINE_8, 0);
// 椭圆绘制,颜色为黄色,线宽为2,线型为8连通,椭圆中心坐标为(400,400),长轴宽度为100,短轴宽度为50
//绘制多边形
std::vector<Point> points;
points.push_back(Point(100, 400));
points.push_back(Point(200, 300));
points.push_back(Point(300, 400));
points.push_back(Point(400, 300));
points.push_back(Point(500, 400));
const Point* ppt[1] = { points.data() };
int npt[] = { points.size() };
fillPoly(image, ppt, npt, 1, Scalar(0, 255, 255), LINE_8, 0);
//显示图像
namedWindow("draw_demo", WINDOW_FREERATIO);
imshow("draw_demo", image);
}
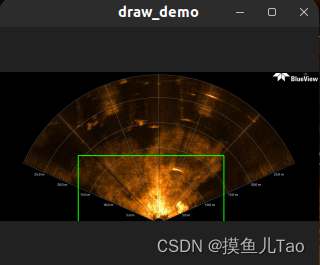
void TestDemo::draw_demo(Mat& image)
{
//在图像的人脸上绘制矩形
Mat img =image.clone();
rectangle(img,Rect(380,400,700,700),Scalar(0,255,0),3,0,0);
//显示图像
namedWindow("draw_demo",WINDOW_FREERATIO);
imshow("draw_demo",img);
//保存图像
imwrite("draw_demo.jpg",img);
}
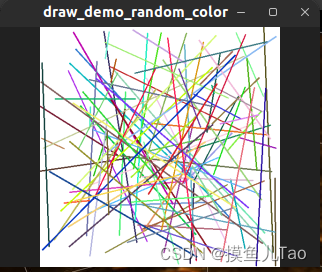
1.14 随机数与随机颜色
void TestDemo::draw_demo_random_color(Mat& image)
{//创建一个白色底板的图像
Mat img = Mat::zeros(Size(512, 512), CV_8UC3);
img = Scalar(255, 255, 255);
//绘制随机颜色的直线
RNG rng(12345);
for (int i = 0; i < 100; i++)
{
Point pt1, pt2;
pt1.x = rng.uniform(0, 512);
pt1.y = rng.uniform(0, 512);
pt2.x = rng.uniform(0, 512);
pt2.y = rng.uniform(0, 512);
line(img, pt1, pt2, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 2, LINE_8, 0);
}
//显示图像
namedWindow("draw_demo_random_color", WINDOW_FREERATIO);
imshow("draw_demo_random_color", img);
//保存图像
imwrite(image_path + "/draw_demo_random_color.jpg", img);
}
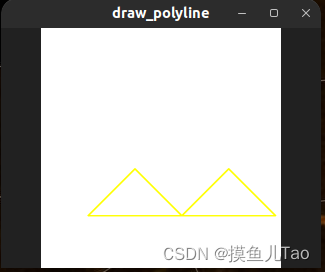
1.15 多边形填充与绘制
void TestDemo::draw_polyline()
{
//创建一个白色底板的图像
Mat img = Mat::zeros(Size(512, 512), CV_8UC3);
img = Scalar(255, 255, 255);
//绘制多边形
std::vector<Point> points;
points.push_back(Point(100, 400));
points.push_back(Point(200, 300));
points.push_back(Point(300, 400));
points.push_back(Point(400, 300));
points.push_back(Point(500, 400));
const Point* ppt[1] = { points.data() };
int npt[] = { points.size() };
polylines(img, ppt, npt, 1, true, Scalar(0, 255, 255), 2, LINE_8, 0);
//显示图像
namedWindow("draw_polyline", WINDOW_FREERATIO);
imshow("draw_polyline", img);
}
1.16 鼠标操作与响应
void on_mouse(int event,int x,int y,int flags,void* data)
{
Mat image= *(Mat*)data;
cout<<"x: "<<x<<"y: "<<y<<endl;
if(event == EVENT_LBUTTONDBLCLK)
{
cout<<"Letf button of the mouse is clicked - position ("<<x<<","<<y<<")"<<endl;
}
if(event == EVENT_RBUTTONDBLCLK)
{
cout<<"Right button of the mouse is clicked - position("<<x<<","<<y<<")"<<endl;
}
}
void TestDemo::mouse_demo(Mat& image)
{
//检测鼠标所在的位置,在图像右下角显示鼠标所在的位置,以及像素值
namedWindow("mouse_demo",WINDOW_FREERATIO);
imshow("mouse_demo",image);
setMouseCallback("mouse_demo",on_mouse,(void*)(&image));
}
鼠标事件函数原型:setMouseCallback(),此函数会在调用之后不断查询回调函数onMouse(),直到窗口销毁
void setMouseCallback(
const String& winname,
MouseCallback onMouse,
void* userdata = 0
)
参数解释:
winname:窗口名称;
onMouse:回调函数;
userdata:传递给回调函数用户自定义的外部数据,userdata是一个 void 类型的指针;
回调函数onMouse(),可随意命名,但是要与 setMouseCallback()函数里的回调函数名称一致
void onMouse(
int event,
int x,
int y,
int flags,
void *userdata
)
参数解释:
event:表示鼠标事件类型的常量(
#define CV_EVENT_MOUSEMOVE 0 //滑动
#define CV_EVENT_LBUTTONDOWN 1 //左键点击
#define CV_EVENT_RBUTTONDOWN 2 //右键点击
#define CV_EVENT_MBUTTONDOWN 3 //中键点击
#define CV_EVENT_LBUTTONUP 4 //左键放开
#define CV_EVENT_RBUTTONUP 5 //右键放开
#define CV_EVENT_MBUTTONUP 6 //中键放开
#define CV_EVENT_LBUTTONDBLCLK 7 //左键双击
#define CV_EVENT_RBUTTONDBLCLK 8 //右键双击
#define CV_EVENT_MBUTTONDBLCLK 9 //中键双击
);
x和y:鼠标指针在图像坐标系的坐标;
flags:鼠标事件标志的常量;
userdata:回调函数接收,用户自定义的外部数据,userdata是一个 void 类型的指针;
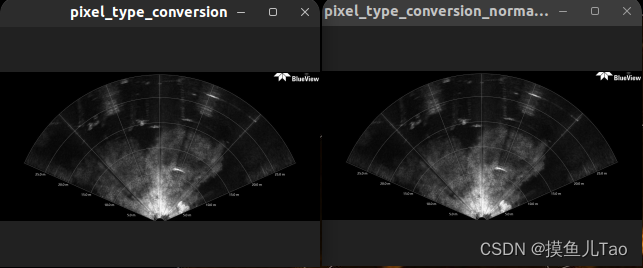
1.7 图像像素类型转化与归一化
void TestDemo:: pixel_type_conversion(Mat& image)
{
namedWindow("pixel_type_conversion",WINDOW_FREERATIO);
namedWindow("pixel_type_conversion_normalize",WINDOW_FREERATIO);
//图像像素类型转化与归一化
Mat gray;
cvtColor(image,gray,COLOR_BGR2GRAY);//将图像转换为灰度图
imshow("pixel_type_conversion",gray);
//像素归一化
Mat dst;
normalize(gray,dst,0,255,NORM_MINMAX,CV_8UC1);
imshow("pixel_type_conversion_normalize",dst);
}
1.8 图像缩放与插值
void TestDemo::resize_demo(Mat& image,int x,int y)
{
Mat dst;
//图像缩放,参数为输入图像、输出图像、目标图像大小、x方向缩放因子、y方向缩放因子、插值方式
resize(image,dst,Size(x,y),0,0,INTER_LINEAR);
imshow("resize_demo",dst);
}
C++ OpenCV中的resize函数用于调整图像的大小。它可以根据指定的尺寸和插值方法对图像进行缩放。函数原型如下:
void cv::resize(InputArray src, OutputArray dst, Size size, double fx = 0, double fy = 0, int interpolation = INTER_LINEAR);
参数说明:
src:输入图像,通常为cv::Mat类型。
dst:输出图像,与输入图像具有相同的类型。
size:目标图像的尺寸,表示为(width, height)。
fx:沿水平轴的缩放因子,默认为0,表示不进行水平缩放。
fy:沿垂直轴的缩放因子,默认为0,表示不进行垂直缩放。
interpolation:插值方法,有以下几种可选:
cv::INTER_NEAREST:最近邻插值,速度最快,但质量最差。
cv::INTER_LINEAR:线性插值,速度较快,质量较好。
cv::INTER_AREA:区域插值,适用于图像缩小,速度较慢,质量最好。
cv::INTER_CUBIC:三次样条插值,速度适中,质量较好。
cv::INTER_LANCZOS4:Lanczos插值,速度适中,质量较好。
1.9 图像翻转
void TestDemo::flip_demo(Mat& image,int flipCode)
{
Mat dst;
//图像翻转,参数为输入图像、输出图像、翻转方式
//flipCode=0表示绕x轴翻转,flipCode>0表示绕y轴翻转,flipCOde<0表示绕x轴和y轴同时翻转
flip(image,dst,flipCode);
namedWindow("flip_demo",WINDOW_FREERATIO);
imshow("flip_demo",dst);
}
1.20 图像旋转
warpAffine函数介绍
warpAffine函数是OpenCV中的一个函数,用于对图像进行仿射变换,包括旋转、缩放、平移等操作。该函数可以对图像进行二维或三维的仿射变换,支持多种插值方法和输出图像格式。
warpAffine是OpenCV中的一个函数,用于对图像进行仿射变换,包括旋转、缩放、平移等操作。该函数可以对图像进行二维或三维的仿射变换,支持多种插值方法和输出图像格式。
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())
Parameters:
src – Source image.
dst – Destination image that has the size dsize and the same type as src .
M – 2\times 3 transformation matrix.
dsize – Size of the destination image.
flags – Combination of interpolation methods (see resize() ) and the optional flag WARP_INVERSE_MAP that means that M is the inverse transformation ( \texttt{dst}\rightarrow\texttt{src} ).
borderMode – Pixel extrapolation method (see borderInterpolate() ). When borderMode=BORDER_TRANSPARENT , it means that the pixels in the destination image corresponding to the “outliers” in the source image are not modified by the function.
borderValue – Value used in case of a constant border. By default, it is 0.
The function warpPerspective transforms the source image using the specified matrix:

getRotationMatrix2D函数介绍
Mat getRotationMatrix2D(Point2f center, double angle, double scale)
Parameters:
center – Center of the rotation in the source image.
angle – Rotation angle in degrees. Positive values mean counter-clockwise rotation (the coordinate origin is assumed to be the top-left corner).
scale – Isotropic scale factor.
mapMatrix – The output affine transformation, 2x3 floating-point matrix.
The function calculates the following matrix:

where
void TestDemo::rotate_demo(Mat& image,double angle,double scale)
{
/*
参数angle表示旋转角度,正值表示逆时针旋转,负值表示顺时针旋转
参数scale表示缩放因子,大于1表示放大,小于1表示缩小
*/
Mat dst,M;
int w = image.cols;
int h = image.rows;
M = getRotationMatrix2D(Point(w/2,h/2),angle,scale);//获取旋转矩阵
double cos=abs(M.at<double>(0,0));
double sin=abs(M.at<double>(0,1));
int nw = cos * w + sin * h;
int nh = sin * w + cos * h;
M.at<double>(0,2) +=(nw-w)/2;
M.at<double>(1,2) +=(nh-h)/2;
warpAffine(image,dst,M,Size(nw,nh));//图像旋转
namedWindow("rotate_demo",WINDOW_FREERATIO);
imshow("rotate_demo",dst);
}

1.21 视频文件/摄像头使用
void TestDemo::video_demo()
{
VideoCapture capture(0);//打开摄像头
if(!capture.isOpened())//摄像头打开失败
{
cout<<"摄像头打开失败"<<endl;
return;
}
Mat frame;
while(1)
{
capture>>frame;//读取摄像头图像
//翻转摄像头显示
flip_demo(frame,1);
imshow("video_demo",frame);//显示摄像头图像
if(waitKey(30)==27)//按下esc键
{
break;
}
}
capture.release();//释放摄像头
destroyAllWindows();//销毁所有窗口
}
1.22 视频处理与保存
void TestDemo::videowriter_demo()
{
//保存视频
VideoWriter writer;
Mat frame;
VideoCapture capture(0);
Size size=Size(capture.get(CAP_PROP_FRAME_WIDTH),capture.get(CAP_PROP_FRAME_HEIGHT));
writer.open("./video_demo.avi",VideoWriter::fourcc('M','J','p','G'),25,size);//fps 25 每秒帧数
while(1)
{
capture>>frame;//读取摄像头图像
writer.write(frame);//写入视频
imshow("videowrite_demo",frame);//显示摄像头图像
if(waitKey(30)==27)//按下ESC键
{
break;
}
}
writer.release();//释放视频
capture.release();
destroyAllWindows();
}