DAC(Digital to Analog Converter)是一种通过电流、电压或电荷的形式将数字信号转换为模拟信号的设备。
DAC模块支持数模转换的开发。它主要用于:
-
作为过程控制计算机系统的输出通道,与执行器相连,实现对生产过程的自动控制。
-
在利用反馈技术的模数转换器设计中,作为重要的功能模块呈现。
基本概念
-
分辨率
分辨率指的是D/A转换器能够转换的二进制位数,位数越多分辨率越高。
-
转换精度
精度是指输入端加有最大数值时,DAC的实际输出值和理论计算值之差,DAC转换器的转换精度与DAC转换器的集成芯片结构和接口电路配置有关。理想情况下,DAC的转换精度越小越好,因此为了获得更高精度的DAC转换结果,首先要保证选择的DAC转换器具备足够高的分辨率。其次,要保证接口电路的器件或电源误差最小或者不存在误差,否则会造成DAC转换的误差,若这些误差超过一定程度,就会导致DAC转换错误。
-
转换速度
转换速度一般由建立时间决定。从输入由全0突变为全1时开始,到输出电压稳定在FSR±½LSB范围(或以FSR±x%FSR指明范围)内为止,这段时间称为建立时间,它是DAC的最大响应时间,所以用它衡量转换速度的快慢。
-
满量程范围FSR(Full Scale Range),是指DAC输出信号幅度的最大范围,不同的DAC有不同的满量程范围,该范围可以用正、负电流或者正、负电压来限制。
-
最低有效位LSB(Least Significant Byte),指的是一个二进制数字中的第0位(即最低位)。
-
运作机制
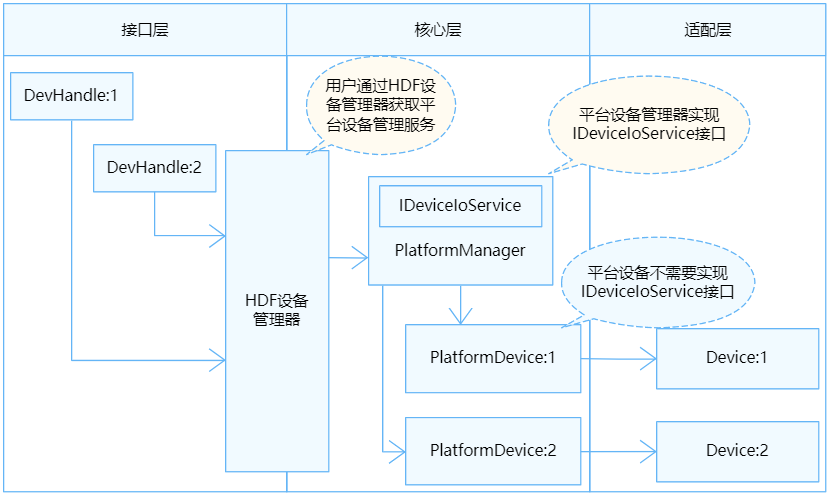
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。DAC模块即采用统一服务模式(如图1所示)。
DAC模块各分层的作用为:
-
接口层:提供打开设备、写入数据和关闭设备接口的能力。
-
核心层:主要提供绑定设备、初始化设备以及释放设备的能力。
-
适配层:由驱动适配者实现与硬件相关的具体功能,如控制器的初始化等。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
说明:
核心层可以调用接口层的函数,也可以通过钩子函数调用适配层函数,从而使得适配层间接的可以调用接口层函数,但是不可逆转接口层调用适配层函数。
约束与限制
DAC模块当前仅支持轻量和小型系统内核(LiteOS-A)。
开发指导
场景介绍
DAC模块主要在设备中数模转换、音频输出和电机控制等设备使用,设置将DAC模块传入的数字信号转换为输出模拟信号时需要用到DAC数模转换驱动。当驱动开发者需要将DAC设备适配到OpenHarmony时,需要进行DAC驱动适配,下文将介绍如何进行DAC驱动适配。
接口说明
为了保证上层在调用DAC接口时能够正确的操作硬件,核心层在//drivers/hdf_core/framework/support/platform/include/dac/dac_core.h中定义了以下钩子函数。驱动适配者需要在适配层实现这些函数的具体功能,并与这些钩子函数挂接,从而完成接口层与核心层的交互。
DacMethod和DacLockMethod定义:
struct DacMethod {
// 写入数据的钩子函数
int32_t (*write)(struct DacDevice *device, uint32_t channel, uint32_t val);
// 启动DAC设备的钩子函数
int32_t (*start)(struct DacDevice *device);
// 停止DAC设备的钩子函数
int32_t (*stop)(struct DacDevice *device);
};
struct DacLockMethod {
int32_t (*lock)(struct DacDevice *device);
void (*unlock)(struct DacDevice *device);
};在适配层中,DacMethod必须被实现,DacLockMethod可根据实际情况考虑是否实现。核心层提供了默认的DacLockMethod,其中使用Spinlock作为保护临界区的锁:
static int32_t DacDeviceLockDefault(struct DacDevice *device)
{
if (device == NULL) {
HDF_LOGE("%s: device is null", __func__);
return HDF_ERR_INVALID_OBJECT;
}
return OsalSpinLock(&device->spin);
}
static void DacDeviceUnlockDefault(struct DacDevice *device)
{
if (device == NULL) {
HDF_LOGE("%s: device is null", __func__);
return;
}
(void)OsalSpinUnlock(&device->spin);
}
static const struct DacLockMethod g_dacLockOpsDefault = {
.lock = DacDeviceLockDefault,
.unlock = DacDeviceUnlockDefault,
};若实际情况不允许使用Spinlock,驱动适配者可以考虑使用其他类型的锁来实现一个自定义的DacLockMethod。一旦实现了自定义的DacLockMethod,默认的DacLockMethod将被覆盖。
表 1 DacMethod结构体成员的钩子函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| write | device:结构体指针,核心层DAC控制器 channel:uint32_t类型,传入的通道号 val:uint32_t类型,要传入的数据 | 无 | HDF_STATUS相关状态 | 写入DA的目标值 |
| start | device:结构体指针,核心层DAC控制器 | 无 | HDF_STATUS相关状态 | 开启DAC设备 |
| stop | device:结构体指针,核心层DAC控制器 | 无 | HDF_STATUS相关状态 | 关闭DAC设备 |
表 2 DacLockMethod结构体成员函数功能说明
| 函数成员 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| lock | device:结构体指针,核心层DAC设备对象。 | 无 | HDF_STATUS相关状态 | 获取临界区锁 |
| unlock | device:结构体指针,核心层DAC设备对象。 | 无 | HDF_STATUS相关状态 | 释放临界区锁 |
开发步骤
DAC模块适配包含以下四个步骤:
-
实例化驱动入口
-
配置属性文件
-
实例化核心层函数
-
驱动调试
开发实例
下方将Hi3516DV300的驱动//device/soc/hisilicon/common/platform/dac/dac_hi35xx.c为例,展示驱动适配者需要提供哪些内容来完整实现设备功能。
-
实例化驱动入口
驱动开发首先需要实例化驱动入口,驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs中保持一致。HDF框架会汇总所有加载的驱动的HdfDriverEntry对象入口,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
static struct HdfDriverEntry g_dacDriverEntry = { .moduleVersion = 1, .Init = VirtualDacInit, .Release = VirtualDacRelease, .moduleName = "virtual_dac_driver", //【必要且与device_info.hcs文件内的模块名匹配】 }; HDF_INIT(g_dacDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 // 核心层dac_core.c管理器服务的驱动入口 struct HdfDriverEntry g_dacManagerEntry = { .moduleVersion = 1, .Bind = DacManagerBind, // DAC不需要实现Bind,本例是一个空实现,驱动适配者可根据自身需要添加相关操作 .Init = DacManagerInit, // 见Init参考 .Release = DacManagerRelease, // 见Release参考 .moduleName = "HDF_PLATFORM_DAC_MANAGER", // 这与device_info.hcs文件中device0对应 }; HDF_INIT(g_dacManagerEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 -
配置属性文件
-
添加//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs器件属性文件。
器件属性值对于驱动适配者的驱动实现以及核心层DacDevice相关成员的默认值或限制范围有密切关系,比如设备通道的个数以及传输速率的最大值,会影响DacDevice相关成员的默认值。
由于采用了统一服务模式,device_info.hcs文件中第一个设备节点必须为DAC管理器,其各项参数如表3所示:
表 3 device_info.hcs节点参数说明
成员名 值 policy 驱动服务发布的策略,DAC管理器具体配置为2,表示驱动对内核态和用户态都发布服务 priority 驱动启动优先级(0-200),值越大优先级越低,优先级相同则不保证device的加载顺序。DAC管理器具体配置为52 permission 驱动创建设备节点权限,DAC管理器具体配置为0664 moduleName 驱动名称,DAC管理器固定为HDF_PLATFORM_DAC_MANAGER serviceName 驱动对外发布服务的名称,DAC管理器服务名设置为HDF_PLATFORM_DAC_MANAGER deviceMatchAttr 驱动私有数据匹配的关键字,DAC管理器没有使用,可忽略 从第二个节点开始配置具体DAC控制器信息,此节点并不表示某一路DAC控制器,而是代表一个资源性质设备,用于描述一类DAC控制器的信息。本例只有一个DAC设备,如有多个设备,则需要在device_info.hcs文件增加deviceNode信息,以及在dac_config.hcs文件中增加对应的器件属性。
-
device_info.hcs配置参考
root { device_dac :: device { // device0是DAC管理器 device0 :: deviceNode { policy = 0; priority = 52; permission = 0644; serviceName = "HDF_PLATFORM_DAC_MANAGER"; moduleName = "HDF_PLATFORM_DAC_MANAGER"; } } // dac_virtual是DAC控制器 dac_virtual :: deviceNode { policy = 0; priority = 56; permission = 0644; moduleName = "virtual_dac_driver"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致。 serviceName = "VIRTUAL_DAC_DRIVER"; // 【必要】驱动对外发布服务的名称,必须唯一。 deviceMatchAttr = "virtual_dac"; // 【必要】用于配置控制器私有数据,要与dac_config.hcs中对应控制器保持一致。 } } -
添加dac_test_config.hcs器件属性文件。
在具体产品对应目录下新增文件用于驱动配置参数(例如hispark_taurus开发板:vendor/hisilicon/hispark_taurus/hdf_config/hdf_test/dac_test_config.hcs),其中配置参数如下:
root { platform { dac_config { match_attr = "virtual_dac"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致 template dac_device { deviceNum = 0; // 设备号 validChannel = 0x1; // 有效通道1 rate = 20000; // 速率 } device_0 :: dac_device { deviceNum = 0; // 设备号 validChannel = 0x2; // 有效通道2 } } } }需要注意的是,新增dac_config.hcs配置文件后,必须在hdf.hcs文件中将其包含,否则配置文件无法生效。
例如:本例中dac_config.hcs所在路径为device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/dac/dac_config.hcs,则必须在产品对应的hdf.hcs中添加如下语句:
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/dac/dac_config.hcs" // 配置文件相对路径
-
-
实例化核心层函数
-
初始化DacDevice成员。
在VirtualDacParseAndInit函数中对DacDevice成员进行初始化操作。
// 虚拟驱动自定义结构体 struct VirtualDacDevice { // DAC设备结构体 struct DacDevice device; // DAC设备号 uint32_t deviceNum; // 有效通道 uint32_t validChannel; // DAC速率 uint32_t rate; }; // 解析并且初始化核心层DacDevice对象 static int32_t VirtualDacParseAndInit(struct HdfDeviceObject *device, const struct DeviceResourceNode *node) { // 定义返回值 int32_t ret; // DAC设备虚拟指针 struct VirtualDacDevice *virtual = NULL; (void)device; // 给virtual指针开辟空间 virtual = (struct VirtualDacDevice *)OsalMemCalloc(sizeof(*virtual)); if (virtual == NULL) { // 为空则返回错误参数 HDF_LOGE("%s: Malloc virtual fail!", __func__); return HDF_ERR_MALLOC_FAIL; } // 读取属性文件配置参数 ret = VirtualDacReadDrs(virtual, node); if (ret != HDF_SUCCESS) { // 读取失败 HDF_LOGE("%s: Read drs fail! ret:%d", __func__, ret); // 释放virtual空间 OsalMemFree(virtual); // 指针置为NULL virtual = NULL; return ret; } // 初始化虚拟指针 VirtualDacDeviceInit(virtual); // 对DacDevice中priv对象初始化 virtual->device.priv = (void *)node; // 对DacDevice中devNum对象初始化 virtual->device.devNum = virtual->deviceNum; // 对DacDevice中ops对象初始化 virtual->device.ops = &g_method; // 添加DAC设备 ret = DacDeviceAdd(&virtual->device); if (ret != HDF_SUCCESS) { // 添加设备失败 HDF_LOGE("%s: add Dac controller failed! ret = %d", __func__, ret); // 释放virtual空间 OsalMemFree(virtual); // 虚拟指针置空 virtual = NULL; return ret; } return HDF_SUCCESS; } -
自定义结构体参考。
通过自定义结构体定义DAC数模转换必要的参数,在定义结构体时需要根据设备的功能参数来实现自定义结构体,从驱动的角度看,自定义结构体是参数和数据的载体,dac_config.hcs文件中传递的参数和数据会被HDF驱动模块的DacTestReadConfig函数读入,通过DeviceResourceIface来初始化结构体成员,其中一些重要数值也会传递给核心层DacDevice对象,例如设备号、总线号等。
struct VirtualDacDevice { struct DacDevice device; //【必要】是核心层控制对象,具体描述见下面 uint32_t deviceNum; //【必要】设备号 uint32_t validChannel; //【必要】有效通道 uint32_t rate; //【必要】采样率 }; // DacDevice是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct DacDevice { const struct DacMethod *ops; OsalSpinlock spin; // 自旋锁 uint32_t devNum; // 设备号 uint32_t chanNum; // 设备通道号 const struct DacLockMethod *lockOps; void *priv; }; -
实例化DacDevice成员DacMethod。
VirtualDacWrite、VirtualDacStop、VirtualDacStart函数会在dac_virtual.c文件中进行模块功能的实例化。
static const struct DacMethod g_method = { .write = VirtualDacWrite, // DAC设备写入值 .stop = VirtualDacStop, // 停止DAC设备 .start = VirtualDacStart, // 开始启动DAC设备 };说明:
DacDevice成员DacMethod的定义和成员说明见接口说明。 -
Init函数开发参考
入参:
HdfDeviceObject这个是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
HDF_STATUS相关状态(表4为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 4 HDF_STATUS相关状态说明
状态(值) 问题描述 HDF_ERR_INVALID_OBJECT 控制器对象非法。 HDF_ERR_INVALID_PARAM 参数非法。 HDF_ERR_MALLOC_FAIL 内存分配失败。 HDF_ERR_IO I/O 错误。 HDF_SUCCESS 传输成功。 HDF_FAILURE 传输失败。 函数说明:
初始化自定义结构体对象,初始化DacDevice成员,并调用核心层DacDeviceAdd函数。
static int32_t VirtualDacParseAndInit(struct HdfDeviceObject *device, const struct DeviceResourceNode *node) { // 定义返回值参数 int32_t ret; // DAC设备的结构体指针 struct VirtualDacDevice *virtual = NULL; (void)device; // 分配指定大小的内存 virtual = (struct VirtualDacDevice *)OsalMemCalloc(sizeof(*virtual)); if (virtual == NULL) { // 分配内存失败 HDF_LOGE("%s: Malloc virtual fail!", __func__); return HDF_ERR_MALLOC_FAIL; } // 读取hcs中的node节点参数,函数定义见下方 ret = VirtualDacReadDrs(virtual, node); if (ret != HDF_SUCCESS) { // 读取节点失败 HDF_LOGE("%s: Read drs fail! ret:%d", __func__, ret); goto __ERR__; } // 初始化DAC设备指针 VirtualDacDeviceInit(virtual); // 节点数据传入私有数据 virtual->device.priv = (void *)node; // 传入设备号 virtual->device.devNum = virtual->deviceNum; // 传入方法 virtual->device.ops = &g_method; // 添加DAC设备 ret = DacDeviceAdd(&virtual->device); if (ret != HDF_SUCCESS) { // 添加DAC设备失败 HDF_LOGE("%s: add Dac controller failed! ret = %d", __func__, ret); goto __ERR__; } // 成功添加DAC设备 return HDF_SUCCESS; __ERR__: // 如果指针为空 if (virtual != NULL) { // 释放内存 OsalMemFree(virtual); // 指针置空 virtual = NULL; } return ret; } static int32_t VirtualDacInit(struct HdfDeviceObject *device) { // 定义返回值参数 int32_t ret; // 设备结构体子节点 const struct DeviceResourceNode *childNode = NULL; // 入参指针进行判断 if (device == NULL || device->property == NULL) { // 入参指针为空 HDF_LOGE("%s: device or property is NULL", __func__); return HDF_ERR_INVALID_OBJECT; } // 入参指针不为空 ret = HDF_SUCCESS; DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) { // 解析子节点 ret = VirtualDacParseAndInit(device, childNode); if (ret != HDF_SUCCESS) { // 解析失败 break; } } // 解析成功 return ret; } static int32_t VirtualDacReadDrs(struct VirtualDacDevice *virtual, const struct DeviceResourceNode *node) { struct DeviceResourceIface *drsOps = NULL; // 获取drsOps方法 drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE); if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetUint16 == NULL) { HDF_LOGE("%s: Invalid drs ops fail!", __func__); return HDF_FAILURE; } // 将配置参数依次读出,并填充至结构体中 if (drsOps->GetUint32(node, "deviceNum", &virtual->deviceNum, 0) != HDF_SUCCESS) { HDF_LOGE("%s: Read deviceNum fail!", __func__); return HDF_ERR_IO; } if (drsOps->GetUint32(node, "validChannel", &virtual->validChannel, 0) != HDF_SUCCESS) { HDF_LOGE("%s: Read validChannel fail!", __func__); return HDF_ERR_IO; } if (drsOps->GetUint32(node, "rate", &virtual->rate, 0) != HDF_SUCCESS) { HDF_LOGE("%s: Read rate fail!", __func__); return HDF_ERR_IO; } return HDF_SUCCESS; } -
Release函数开发参考
入参:
HdfDeviceObject是整个驱动对外提供的接口参数,具备HCS配置文件的信息。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
说明:
所有强制转换获取相应对象的操作前提是在Init函数中具备对应赋值的操作。static void VirtualDacRemoveByNode(const struct DeviceResourceNode *node) { // 定义返回值参数 int32_t ret; // 定义DAC设备号 int16_t devNum; // DAC设备结构体指针 struct DacDevice *device = NULL; // DAC虚拟结构体指针 struct VirtualDacDevice *virtual = NULL; // 设备资源接口结构体指针 struct DeviceResourceIface *drsOps = NULL; // 通过实例入口获取设备资源 drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE); // 入参指判空 if (drsOps == NULL || drsOps->GetUint32 == NULL) { // 指针为空 HDF_LOGE("%s: invalid drs ops fail!", __func__); return; } // 获取devNum节点的数据 ret = drsOps->GetUint16(node, "devNum", (uint16_t *)&devNum, 0); if (ret != HDF_SUCCESS) { // 获取失败 HDF_LOGE("%s: read devNum fail!", __func__); return; } // 获取DAC设备号 device = DacDeviceGet(devNum); // 判断DAC设备号以及数据是否为空 if (device != NULL && device->priv == node) { // 为空释放DAC设备号 DacDevicePut(device); // 移除DAC设备号 DacDeviceRemove(device); virtual = (struct VirtualDacDevice *)device; // 释放虚拟指针 OsalMemFree(virtual); } return; } static void VirtualDacRelease(struct HdfDeviceObject *device) { // 定义设备资源子节点结构体指 const struct DeviceResourceNode *childNode = NULL; // 入参指针判空 if (device == NULL || device->property == NULL) { // 入参指针为空 HDF_LOGE("%s: device or property is NULL", __func__); return; } DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) { // 通过节点移除DAC VirtualDacRemoveByNode(childNode); } }
-
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的测试用例是否成功等。
最后
有很多小伙伴不知道学习哪些鸿蒙开发技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?而且学习时频繁踩坑,最终浪费大量时间。所以有一份实用的鸿蒙(HarmonyOS NEXT)资料用来跟着学习是非常有必要的。
这份鸿蒙(HarmonyOS NEXT)资料包含了鸿蒙开发必掌握的核心知识要点,内容包含了(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、音频、视频、WebGL、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、Harmony南向开发、鸿蒙项目实战等等)鸿蒙(HarmonyOS NEXT)技术知识点。
希望这一份鸿蒙学习资料能够给大家带来帮助,有需要的小伙伴自行领取,限时开源,先到先得~无套路领取!!
获取这份完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
鸿蒙(HarmonyOS NEXT)最新学习路线
-
HarmonOS基础技能
- HarmonOS就业必备技能
- HarmonOS多媒体技术
- 鸿蒙NaPi组件进阶
- HarmonOS高级技能

- 初识HarmonOS内核
- 实战就业级设备开发
有了路线图,怎么能没有学习资料呢,小编也准备了一份联合鸿蒙官方发布笔记整理收纳的一套系统性的鸿蒙(OpenHarmony )学习手册(共计1236页)与鸿蒙(OpenHarmony )开发入门教学视频,内容包含:ArkTS、ArkUI、Web开发、应用模型、资源分类…等知识点。
获取以上完整版高清学习路线,请点击→纯血版全套鸿蒙HarmonyOS学习资料
《鸿蒙 (OpenHarmony)开发入门教学视频》
《鸿蒙生态应用开发V2.0白皮书》
《鸿蒙 (OpenHarmony)开发基础到实战手册》
OpenHarmony北向、南向开发环境搭建
《鸿蒙开发基础》
- ArkTS语言
- 安装DevEco Studio
- 运用你的第一个ArkTS应用
- ArkUI声明式UI开发
- .……
《鸿蒙开发进阶》
- Stage模型入门
- 网络管理
- 数据管理
- 电话服务
- 分布式应用开发
- 通知与窗口管理
- 多媒体技术
- 安全技能
- 任务管理
- WebGL
- 国际化开发
- 应用测试
- DFX面向未来设计
- 鸿蒙系统移植和裁剪定制
- ……
《鸿蒙进阶实战》
- ArkTS实践
- UIAbility应用
- 网络案例
- ……
获取以上完整鸿蒙HarmonyOS学习资料,请点击→纯血版全套鸿蒙HarmonyOS学习资料
总结
总的来说,华为鸿蒙不再兼容安卓,对中年程序员来说是一个挑战,也是一个机会。只有积极应对变化,不断学习和提升自己,他们才能在这个变革的时代中立于不败之地。