参考:单目vo中的深度确定方法--三角测量_单目相机三角测量-CSDN博客
方法一:直接法
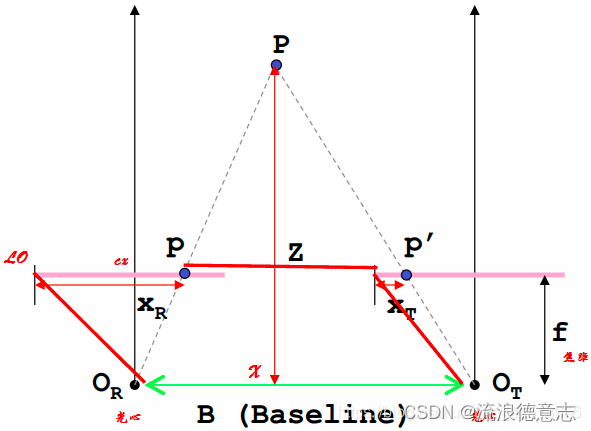
由于我们已经通过本质矩阵分解或者单应矩阵分解获得了R与t,此时想求的是两个特征点的深度
bool depthFromTriangulation(
const SE3& T_search_ref,
const Vector3d& f_ref,
const Vector3d& f_cur,
double& depth)
{
Matrix<double,3,2> A;
A << T_search_ref.rotation_matrix()*f_ref, f_cur;
const Matrix2d AtA = A.transpose()*A;
if(AtA.determinant() < 0.000001)
return false;
const Vector2d depth2 = - AtA.inverse()*A.transpose()*T_search_ref.translation();
depth = fabs(depth2[0]);
return true;
}方法二:Cramer法则
// 方程
// d_ref * f_ref = d_cur * ( R_RC * f_cur ) + t_RC
// => [ f_ref^T f_ref, -f_ref^T f_cur ] [d_ref] = [f_ref^T t]
// [ f_cur^T f_ref, -f_cur^T f_cur ] [d_cur] = [f_cur^T t]
// 二阶方程用克莱默法则求解并解之
Vector3d t = T_R_C.translation();
Vector3d f2 = T_R_C.rotation_matrix() * f_curr;
Vector2d b = Vector2d ( t.dot ( f_ref ), t.dot ( f2 ) );
// 此处计算出系数矩阵A
double A[4];
A[0] = f_ref.dot ( f_ref );
A[2] = f_ref.dot ( f2 );
A[1] = -A[2];
A[3] = - f2.dot ( f2 );
// 此处计算A的行列式
double d = A[0]*A[3]-A[1]*A[2];
Vector2d lambdavec =
Vector2d ( A[3] * b ( 0,0 ) - A[1] * b ( 1,0 ),
-A[2] * b ( 0,0 ) + A[0] * b ( 1,0 )) /d;
Vector3d xm = lambdavec ( 0,0 ) * f_ref;
Vector3d xn = t + lambdavec ( 1,0 ) * f2;
Vector3d d_esti = ( xm+xn ) / 2.0; // 三角化算得的深度向量
double depth_estimation = d_esti.norm(); // 深度值方法三:OpenCV接口 同方法二
void triangulation (
const vector< KeyPoint >& keypoint_1,
const vector< KeyPoint >& keypoint_2,
const std::vector< DMatch >& matches,
const Mat& R, const Mat& t,
vector< Point3d >& points )
{
//相机第一个位置处的位姿
Mat T1 = (Mat_<float> (3,4) <<
1,0,0,0,
0,1,0,0,
0,0,1,0);
//相机第二个位置处的位姿
Mat T2 = (Mat_<float> (3,4) <<
R.at<double>(0,0), R.at<double>(0,1), R.at<double>(0,2), t.at<double>(0,0),
R.at<double>(1,0), R.at<double>(1,1), R.at<double>(1,2), t.at<double>(1,0),
R.at<double>(2,0), R.at<double>(2,1), R.at<double>(2,2), t.at<double>(2,0)
);
// 相机内参
Mat K = ( Mat_<double> ( 3,3 ) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1 );
vector<Point2f> pts_1, pts_2;
for ( DMatch m:matches )
{
// 将像素坐标转换至相机平面坐标,为什么要这一步,上面推导中有讲
pts_1.push_back ( pixel2cam( keypoint_1[m.queryIdx].pt, K) );
pts_2.push_back ( pixel2cam( keypoint_2[m.trainIdx].pt, K) );
}
Mat pts_4d;
//opencv提供的三角测量函数
cv::triangulatePoints( T1, T2, pts_1, pts_2, pts_4d );
// 转换成非齐次坐标
for ( int i=0; i<pts_4d.cols; i++ )
{
Mat x = pts_4d.col(i);
x /= x.at<float>(3,0); // 归一化
Point3d p (
x.at<float>(0,0),
x.at<float>(1,0),
x.at<float>(2,0)
);
points.push_back( p );
}
}
Point2f pixel2cam ( const Point2d& p, const Mat& K )
{
return Point2f
(
( p.x - K.at<double>(0,2) ) / K.at<double>(0,0),
( p.y - K.at<double>(1,2) ) / K.at<double>(1,1)
);
}方法四:最小二乘法
// vins中初始化sfm时根据一个三维点在两帧中的投影位置确定三维点位置
void GlobalSFM::triangulatePoint(Eigen::Matrix<double, 3, 4> &Pose0, Eigen::Matrix<double, 3, 4> &Pose1,
Vector2d &point0, Vector2d &point1, Vector3d &point_3d)
{
Matrix4d design_matrix = Matrix4d::Zero();
design_matrix.row(0) = point0[0] * Pose0.row(2) - Pose0.row(0);
design_matrix.row(1) = point0[1] * Pose0.row(2) - Pose0.row(1);
design_matrix.row(2) = point1[0] * Pose1.row(2) - Pose1.row(0);
design_matrix.row(3) = point1[1] * Pose1.row(2) - Pose1.row(1);
Vector4d triangulated_point;
triangulated_point =
design_matrix.jacobiSvd(Eigen::ComputeFullV).matrixV().rightCols<1>();
point_3d(0) = triangulated_point(0) / triangulated_point(3);
point_3d(1) = triangulated_point(1) / triangulated_point(3);
point_3d(2) = triangulated_point(2) / triangulated_point(3);
}方法五:概率法
测量值是符合正态分布的,噪声符合均匀分布,此时我们可以通过一些概率的方法对多次测量结果进行融合,得到更鲁棒的结果。
-
在SVO中,使用贝叶斯方法(最大后验概率)进行更新
-
在LSD中,使用卡尔曼滤波进行深度测量值的滤波
参考:lsd-slam深度滤波器-CSDN博客