import copy
import random
import matplotlib
import math
def distance_p2l(point, line_point1, line_point2):
if (line_point2[0] - line_point1[0]) == 0:
return abs(point[0] - line_point2[0])
# 计算直线的斜率
m = (line_point2[1] - line_point1[1]) / (line_point2[0] - line_point1[0])
# 计算直线的截距
b = line_point1[1] - m * line_point1[0]
# 计算距离
d = abs(m * point[0] - point[1] + b) / math.sqrt(m ** 2 + 1)
return d
def node_above_line(node, line0, line1,upper_convex=True,left_convex=True):
real_y = node[1]
# y_on_line =(node[0]-line0[0])/(line1[0]-line0[0])*(line1[1]-line0[1])+line0[1]
if (line1[0] - line0[0])!=0:
print(node[1],
node[0] - line0[0] / (line1[0] - line0[0]) * (line1[1] - line0[1]) + line0[
1])
if node[1] > (node[0]-line0[0])/(line1[0]-line0[0])* (line1[1]-line0[1])+line0[1]:
return True
else:
return False
else:
if node[0]<line0[0]:
if upper_convex==True:
if left_convex:
return True
else:
return False
if upper_convex==False:
if left_convex:
return False
else:
return True
else:
if upper_convex == True:
if left_convex:
return False
else:
return True
if upper_convex==False:
if left_convex:
return True
else:
return False
def cal_convex_hull_point(min_x_node, max_x_node, upper_set,upper_convex=True):
if len(upper_set) == 0:
return [min_x_node, max_x_node]
upper_set_distance2line = [distance_p2l(point, max_x_node, min_x_node) for point in upper_set]
max_idx = upper_set_distance2line.index(max(upper_set_distance2line))
farthest_p = upper_set[max_idx]
upper_set_mins = [node for node in upper_set if node != farthest_p]
left_subset_of_upper, right_subset_of_upper = [], []
for node in upper_set_mins:
if node_above_line(node, farthest_p, min_x_node,upper_convex=upper_convex,left_convex=True)==upper_convex:
left_subset_of_upper.append(node)
if node_above_line(node, farthest_p, max_x_node,upper_convex=upper_convex,left_convex=False)==upper_convex:
right_subset_of_upper.append(node)
lu = cal_convex_hull_point(min_x_node,farthest_p,left_subset_of_upper,upper_convex)
ru = cal_convex_hull_point(farthest_p,max_x_node,right_subset_of_upper,upper_convex)
return lu+ru
def divide_conquer(nodes):
sorted_nodes = sorted(nodes, key=lambda x: x[0])
max_x_node = sorted_nodes[-1]
min_x_node = sorted_nodes[0]
upper_set = []
lower_set = []
lu,ru,ll,rl = [],[],[],[]
for node in sorted_nodes[1:-1]:
if node_above_line(node, max_x_node, min_x_node):
upper_set.append(node)
else:
lower_set.append(node)
if len(upper_set)!=0:
upper_set_distance2line = [distance_p2l(point, max_x_node, min_x_node) for point in upper_set]
max_idx = upper_set_distance2line.index(max(upper_set_distance2line))
farthest_p = upper_set[max_idx]
upper_set_mins = [node for node in upper_set if node != farthest_p]
left_subset_of_upper, right_subset_of_upper = [], []
for node in upper_set_mins:
if node_above_line(node, farthest_p, min_x_node,left_convex=True):
left_subset_of_upper.append(node)
if node_above_line(node, farthest_p, max_x_node,left_convex=False):
right_subset_of_upper.append(node)
lu = cal_convex_hull_point(min_x_node, farthest_p, left_subset_of_upper)
ru = cal_convex_hull_point(farthest_p, max_x_node, right_subset_of_upper)
if len(lower_set) != 0:
lower_set_distance2line = [distance_p2l(point, max_x_node, min_x_node) for point in lower_set]
max_idx = lower_set_distance2line.index(max(lower_set_distance2line))
farthest_p = lower_set[max_idx]
lower_set_mins = [node for node in lower_set if node != farthest_p]
left_subset_of_lower, right_subset_of_lower = [], []
for node in lower_set_mins:
if node_above_line(node, farthest_p, min_x_node,upper_convex=False,left_convex=True)==False:
left_subset_of_lower.append(node)
if node_above_line(node, farthest_p, max_x_node,upper_convex=False,left_convex=False)==False:
right_subset_of_lower.append(node)
ll = cal_convex_hull_point(min_x_node, farthest_p, left_subset_of_lower,upper_convex=False)
rl = cal_convex_hull_point(farthest_p, max_x_node, right_subset_of_lower,upper_convex=False)
point_set = list(set(ll + lu + rl + ru))
print("set point",point_set)
convex0 = lu + ru
convex1 = ll + rl
convex0 = [convex0[i] for i in range(len(convex0)) if i==0 or i>0 and convex0[i]!=convex0[(i-1)]]
convex1 = [convex1[i] for i in range(len(convex1)) if i==0 or i>0 and convex1[i] != convex1[i - 1]]
convex1 = [convex1[i] for i in range(len(convex1) - 1, -1, -1)]
convex = convex0 +convex1
convex = convex + [convex[0]]
print("lines are ", convex)
return convex
def draw_points(points, convex_p=None):
import matplotlib.pyplot as plt
plt.ion()
# 输入点的坐标
# points = [(0, 55), (40, 93), (20, 70), (10, 60)] # 示例坐标
# 分离 x 和 y 坐标
x_coords = [point[0] for point in points]
y_coords = [point[1] for point in points]
# 绘制点
plt.scatter(x_coords, y_coords, color='blue')
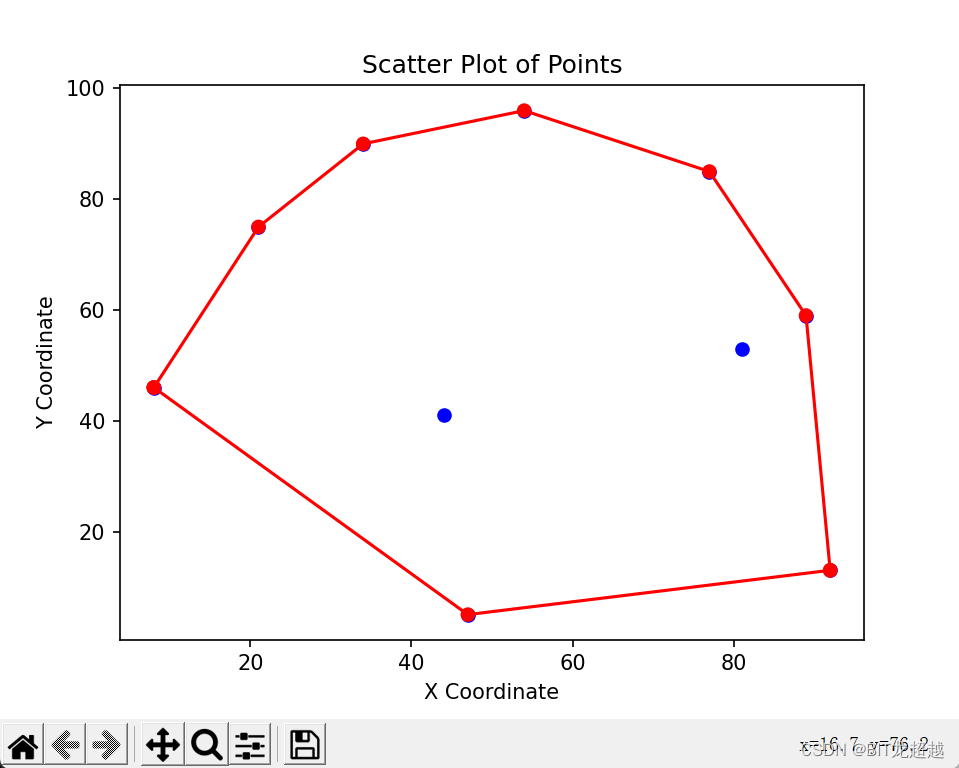
if convex_p != None:
c_x = [p[0] for p in convex_p]
c_y = [p[1] for p in convex_p]
colors = ['red'] * len(c_y)
plt.scatter(c_x, c_y, color=colors)
plt.plot(c_x, c_y, color='red')
# 添加标题和坐标轴标签
plt.title('Scatter Plot of Points')
plt.xlabel('X Coordinate')
plt.ylabel('Y Coordinate')
plt.pause(5)
plt.ioff()
plt.clf()
def pnpoly(vertices, testp):
n = len(vertices)
j = n - 1
res = False
for i in range(n):
if (vertices[i][1] > testp[1]) != (vertices[j][1] > testp[1]) and \
testp[0] < (vertices[j][0] - vertices[i][0]) * (testp[1] - vertices[i][1]) / (
vertices[j][1] - vertices[i][1]) + vertices[i][0]:
res = not res
j = i
return res
for i in range(38,100):
print('seed',i)
random.seed(i)
nodes = [(random.randint(0, 100), random.randint(0, 100)) for i in range(10)]
print(nodes)
draw_points(nodes)
convex_p = divide_conquer(nodes)
draw_points(nodes, convex_p)