目录
maya打开脚本编辑器
运行打开bvh脚本
maya导出bvh脚本
maya打开脚本编辑器
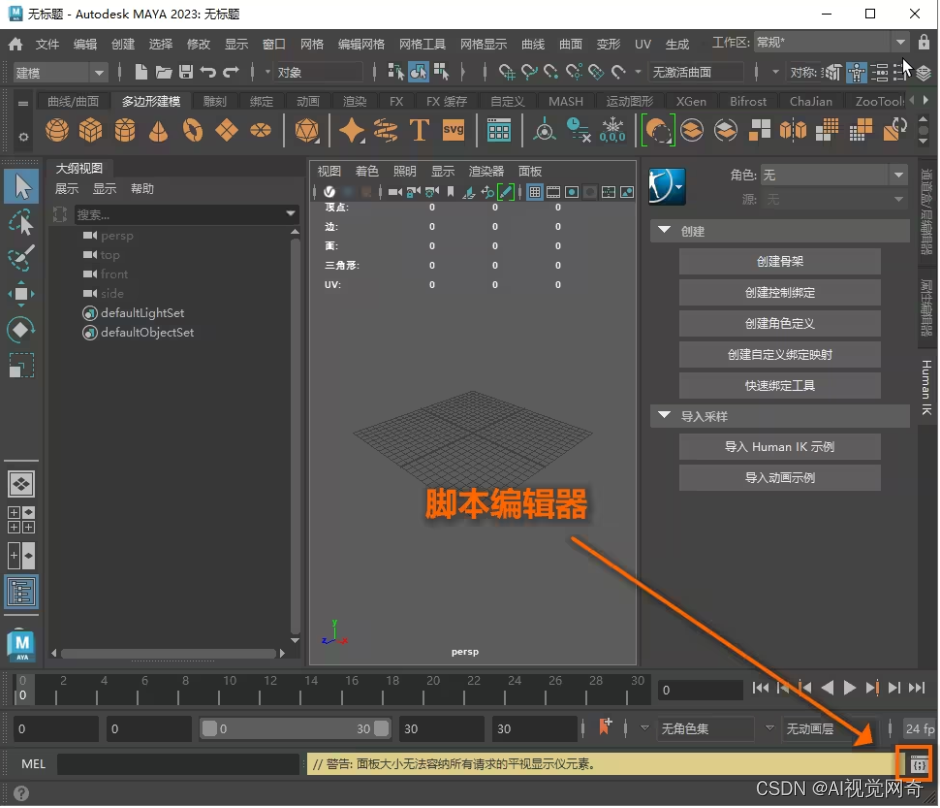
打开Maya软件,点击右下角 “脚本编辑器”
运行打开bvh脚本
https://github.com/jhoolmans/mayaImporterBVH/blob/master/bvh_importer.py
import os
import re
from typing import Optional
import maya.cmds as mc
space_re = re.compile(r"\s+")
# This maps the BVH naming convention to Maya
translationDict = {
"Xposition": "translateX",
"Yposition": "translateY",
"Zposition": "translateZ",
"Xrotation": "rotateX",
"Yrotation": "rotateY",
"Zrotation": "rotateZ"
}
class TinyDAG(object):
"""
Tiny DAG class for storing the hierarchy of the BVH file.
"""
def __init__(self, obj: str, parent: Optional["TinyDAG"] = None):
"""Constructor"""
self.obj = obj
self.__parent = parent
@property
def parent(self):
"""Returns the parent of the object"""
return self.__parent
def __str__(self) -> str:
"""String representation of the object"""
return str(self.obj)
def full_path(self) -> str:
"""Returns the full path of the object"""
if self.parent is not None:
return "%s|%s" % (self.parent.full_path(), str(self))
return str(self.obj)
class BVHImporterDialog(object):
"""
BVH Importer Dialog
This class is the main dialog for the BVH importer.
"""
def __init__(self, debug=False):
self._name = "bvhImportDialog"
self._title = "BVH Importer v2.0"
if debug:
print("Debug is deprecated.")
# UI related
self._textfield = ""
self._scale_field = ""
self._frame_field = ""
self._rotation_order = ""
self._reload = ""
# Other
self._root_node = None # Used for targeting
# BVH specific stuff
self._filename = ""
self._channels = []
self.setup_ui()
def setup_ui(self):
"""
Builds the UI
"""
win = self._name
if mc.window(win, ex=True):
mc.deleteUI(win)
# Non sizeable dialog
win = mc.window(self._name, title=self._title, w=200, rtf=True,
sizeable=False)
mc.columnLayout(adj=1, rs=5)
mc.separator()
mc.text("Options")
mc.separator()
mc.rowColumnLayout(numberOfColumns=2,
columnWidth=[(1, 80), (2, 150)],
cal=[(1, "right"), (2, "center")],
cs=[(1, 5), (2, 5)],
rs=[(1, 5), (2, 5)])
mc.text("Rig scale")
self._scale_field = mc.floatField(minValue=0.01, maxValue=2, value=1)
mc.text("Frame offset")
self._frame_field = mc.intField(minValue=0)
mc.text("Rotation Order")
self._rotation_order = mc.optionMenu()
mc.menuItem(label='XYZ')
mc.menuItem(label='YZX')
mc.menuItem(label='ZXY')
mc.menuItem(label='XZY')
mc.menuItem(label='YXZ')
mc.menuItem(label='ZYX')
mc.setParent("..")
mc.separator()
# Targeting UI
mc.text("Skeleton Targeting")
mc.text("(Select the hips)")
mc.separator()
mc.rowColumnLayout(numberOfColumns=2,
columnWidth=[(1, 150), (2, 80)],
cs=[(1, 5), (2, 5)],
rs=[(1, 5), (2, 5)])
self._textfield = mc.textField(editable=False)
mc.button("Select/Clear", c=self._on_select_root)
mc.setParent("..")
mc.separator()
mc.button("Import..", c=self._on_select_file)
self._reload = mc.button("Reload", enable=False, c=self._read_bvh)
# Footer
mc.text("by Jeroen Hoolmans")
mc.window(win, e=True, rtf=True, sizeable=False)
mc.showWindow(win)
def _on_select_file(self, e):
"""
Callback for the import button.
"""
file_filter = "All Files (*.*);;Motion Capture (*.bvh)"
result = mc.fileDialog2(fileFilter=file_filter, dialogStyle=1, fm=1)
if result is None or not len(result):
return
self._filename = result[0]
mc.button(self._reload, e=True, enable=True)
# Action!
self._read_bvh()
def load_bvh(self, filename):
self._filename = filename
self._read_bvh()
def _read_bvh(self, *_args):
# Safe close is needed for End Site part to keep from setting new
# parent.
safe_close = False
# Once motion is active, animate.
motion = False
# Clear channels before appending
self._channels = []
# Scale the entire rig and animation
rig_scale = mc.floatField(self._scale_field, q=True, value=True)
frame = mc.intField(self._frame_field, q=True, value=True)
rot_order = mc.optionMenu(self._rotation_order, q=True, select=True) - 1
with open(self._filename) as f:
# Check to see if the file is valid (sort of)
if not f.readline().startswith("HIERARCHY"):
mc.error("No valid .bvh file selected.")
return False
if self._root_node is None:
# Create a group for the rig, easier to scale.
# (Freeze transform when ungrouping please..)
mocap_name = os.path.basename(self._filename)
grp = mc.group(em=True, name="_mocap_%s_grp" % mocap_name)
mc.setAttr("%s.scale" % grp, rig_scale, rig_scale, rig_scale)
# The group is now the 'root'
my_parent = TinyDAG(grp, None)
else:
my_parent = TinyDAG(self._root_node, None)
self._clear_animation()
for line in f:
line = line.replace(" ", " ") # force spaces
if not motion:
# root joint
if line.startswith("ROOT"):
# Set the Hip joint as root
if self._root_node:
my_parent = TinyDAG(str(self._root_node), None)
else:
my_parent = TinyDAG(line[5:].rstrip(), my_parent)
# Update root node in case we want to reload.
self._root_node = my_parent
mc.textField(self._textfield,
e=True,
text=my_parent.full_path())
if "JOINT" in line:
jnt = space_re.split(line.strip())
# Create the joint
my_parent = TinyDAG(jnt[1], my_parent)
if "End Site" in line:
# Finish up a hierarchy and ignore a closing bracket
safe_close = True
if "}" in line:
# Ignore when safeClose is on
if safe_close:
safe_close = False
continue
# Go up one level
if my_parent is not None:
my_parent = my_parent.parent
if my_parent is not None:
mc.select(my_parent.full_path())
if "CHANNELS" in line:
chan = line.strip()
chan = space_re.split(chan)
# Append the channels that are animated
for i in range(int(chan[1])):
self._channels.append("%s.%s" % (
my_parent.full_path(),
translationDict[chan[2 + i]]
))
if "OFFSET" in line:
offset = line.strip()
offset = space_re.split(offset)
jnt_name = str(my_parent)
# When End Site is reached, name it "_tip"
if safe_close:
jnt_name += "_tip"
# skip if exists
if mc.objExists(my_parent.full_path()):
jnt = my_parent.full_path()
else:
# Build a new joint
jnt = mc.joint(name=jnt_name, p=(0, 0, 0))
mc.setAttr(jnt + ".rotateOrder", rot_order)
mc.setAttr(
jnt + ".translate",
float(offset[1]),
float(offset[2]),
float(offset[3])
)
if "MOTION" in line:
# Animate!
motion = True
else:
# We don't really need to use Frame count and time
# (since Python handles file reads nicely)
if "Frame" not in line:
data = space_re.split(line.strip())
# Set the values to channels
for index, value in enumerate(data):
mc.setKeyframe(self._channels[index],
time=frame,
value=float(value))
frame = frame + 1
def _clear_animation(self):
if self._root_node is None:
mc.error("Could not find root node to clear animation.")
return
# Select hierarchy
mc.select(str(self._root_node), hi=True)
nodes = mc.ls(sl=True)
trans_attrs = ["translateX", "translateY", "translateZ"]
rot_attrs = ["rotateX", "rotateY", "rotateZ"]
for node in nodes:
for attr in trans_attrs + rot_attrs:
# Delete input connections
connections = mc.listConnections("%s.%s" % (node, attr),
s=True,
d=False)
if connections is not None:
mc.delete(connections)
for attr in rot_attrs:
# Reset rotation
mc.setAttr("%s.%s" % (node, attr), 0)
def _on_select_root(self, *_args):
# When targeting, set the root joint (Hips)
selection = mc.ls(sl=True, type="joint", l=True)
if len(selection) == 0:
self._root_node = None
mc.textField(self._textfield, e=True, text="")
else:
self._root_node = selection[0]
mc.textField(self._textfield, e=True, text=self._root_node)
if __name__ == "__main__":
dialog = BVHImporterDialog()maya导出bvh脚本
https://github.com/zhaozigu/maya-export-bvh/blob/main/export_bvh.py
import os
import math
import maya.cmds as cmds
import maya.api.OpenMaya as om
def get_bone_rotation(bone):
cur_mat = om.MMatrix(cmds.xform(bone, q=True, ws=True, m=True))
parent = cmds.listRelatives(bone, p=True)[0]
parent_mat = om.MMatrix(cmds.xform(parent, q=True, ws=True, m=True))
local_mat = cur_mat * parent_mat.inverse()
cur_xfo_mat = om.MTransformationMatrix(local_mat)
rotation = [math.degrees(x) for x in cur_xfo_mat.rotation().asVector()]
return rotation
def export_motion(joints, start_frame, end_frame, rot_order: tuple):
motion_str = ""
root_joint = joints[0]
for frame in range(start_frame, end_frame + 1):
cmds.currentTime(frame)
for joint in joints:
joint_name = cmds.ls(joint, long=True)[0]
rot = get_bone_rotation(joint_name)
if joint == root_joint:
loc = cmds.xform(joint_name, q=True, translation=True)
motion_str += "%.6f %.6f %.6f " % (loc[0], loc[1], loc[2])
motion_str += "%.6f %.6f %.6f " % (
rot[rot_order[0]], rot[rot_order[1]], rot[rot_order[2]])
motion_str += "\n"
return motion_str
def export_hierarchy(joints, rot_order: str):
hierarchy_str = "HIERARCHY\n"
def _process_joint(joint, indent):
nonlocal hierarchy_str
joint_name_raw = cmds.ls(joint, long=True)[0]
joint_name = joint_name_raw.split("|")[-1].split(":")[-1]
if indent == 0:
hierarchy_str += "{}ROOT {}\n".format('\t' * indent, joint_name)
else:
hierarchy_str += "{}JOINT {}\n".format('\t' * indent, joint_name)
loc = cmds.xform(joint_name_raw, q=True, translation=True)
hierarchy_str += "{}{{\n".format('\t' * indent)
hierarchy_str += "{}OFFSET {:.6f} {:.6f} {:.6f}\n".format(
'\t' * (indent + 1), loc[0], loc[1], loc[2])
if indent == 0:
hierarchy_str += "{}CHANNELS 6 Xposition Yposition Zposition {}rotation {}rotation {}rotation\n".format(
'\t' * (indent + 1), rot_order[0], rot_order[1], rot_order[2])
else:
hierarchy_str += "{}CHANNELS 3 {}rotation {}rotation {}rotation\n".format(
'\t' * (indent + 1), rot_order[0], rot_order[1], rot_order[2])
children = cmds.listRelatives(joint, children=True, type="joint")
if children:
for child in children:
_process_joint(child, indent + 1)
else:
hierarchy_str += "{}End Site\n".format('\t' * (indent + 1))
hierarchy_str += "{}{{\n".format('\t' * (indent + 1))
hierarchy_str += "{}OFFSET 0.0 0.0 0.0\n".format(
'\t' * (indent + 2))
hierarchy_str += "{}}}\n".format('\t' * (indent + 1))
hierarchy_str += "{}}}\n".format('\t' * indent)
root_joint = joints[0]
_process_joint(root_joint, 0)
return hierarchy_str
def export_bvh(joints, output_file_path, start_frame, end_frame, rot_order="ZXY"):
_order = {
"XYZ": (0, 1, 2),
"XZY": (0, 2, 1),
"YXZ": (1, 0, 2),
"YZX": (1, 2, 0),
"ZXY": (2, 0, 1),
"ZYX": (2, 1, 0),
}
assert rot_order in _order, "The parameters of the rotation order are incorrect"
hierarchy = export_hierarchy(joints, rot_order)
motion = export_motion(joints, start_frame, end_frame, _order[rot_order])
num_frames = end_frame - start_frame + 1
frame_rate = cmds.playbackOptions(query=True, framesPerSecond=True)
if frame_rate == 0:
frame_rate = 24.0
frame_time = 1.0 / frame_rate
with open(output_file_path, "w") as output_file:
output_file.write(hierarchy)
output_file.write(
f"MOTION\nFrames: {num_frames}\nFrame Time: {frame_time:.6f}\n")
output_file.write(motion)
def get_ordered_joints(joint):
ordered_joints = [joint]
children = cmds.listRelatives(joint, children=True, type="joint")
if children:
for child in children:
ordered_joints.extend(get_ordered_joints(child))
return ordered_joints
if __name__ == "__main__":
root_joint_name = "root"
root_joint = None
children = cmds.listRelatives(
root_joint_name, children=True, type="joint")
if children:
root_joint = children[0]
else:
raise ValueError(f"No joint found under {root_joint_name}")
joints = get_ordered_joints(root_joint)
print(joints)
start_frame = int(cmds.playbackOptions(query=True, minTime=True))
end_frame = int(cmds.playbackOptions(query=True, maxTime=True))
# Set the output file path
output_file_path = os.path.join(
os.path.expanduser("~"), "maya_body_test.bvh")
export_bvh(joints, output_file_path, start_frame, end_frame, "ZYX")