手边有一套正点原子linux开发板imax6ul,一直在吃灰,周末业余时间无聊,把EtherCAT的开源IGH主站移植到开发板上玩玩儿,搞点事情做。顺便学习研究下EtherCAT总线协议及其对伺服驱动器的运动控制过程。实验很有意思,这里总结下实验过程,分享给有需要的小伙伴。
前言
igh EtherCAT Master是一个用于控制EtherCAT网络的软件模块,它提供了主站功能。主站负责与从站进行通信和同步,控制从站的操作。igh EtherCAT Master具有丰富的功能和灵活的配置选项,可以满足不同应用场景的需求。它提供了一系列的API和工具,使得开发者可以方便地进行EtherCAT网络的开发和调试。
igh EtherCAT Master是用的最多且实时性最好的 EtherCAT 开源主站。很多公司项目软件主站都是用的它,有很多软件专利可以挖掘。一些公司的机器人主控四肢电机驱动器通信和运动板卡,采用的也是IgH 。基于IgH作产品开发,基本能满足大部分使用场景。
关于EtherCAT主站协议栈,目前有两大主流开源代码为SOEM(即支持Linux,又支持windows )和IgH EtherCAT Master只支持Linux )。
本文以IgH最新稳定版本1.6来移植,简单记录下IgH EtherCAT Master在嵌入式系统中的移植过程及主从站伺服驱动器通信测试。( [Linux 内核版本:Linux-4.1.15] )。
IgH官方介绍:
EtherCAT-Master | EtherLab
整个交叉编译过程很顺利,没遇到一点儿报错。本次移植仅是测试,简单起见使用通用的网卡驱动,性能上肯定不是最好。要想高性能一方面需要给内核打实时性补丁,一方面还需对特定的网卡驱动进行优化适配。源码里自带了一些网卡驱动,如8139和e1000网卡驱动,Igb(Intel Gigabit )以太网驱动程序。
8139和e1000是两种常见的网卡芯片,分别由Realtek和Intel生产。Realtek 8139(也称为RTL8139)是Realtek生产的一款常用的乙太网网卡芯片,广泛应用于早期的计算机和嵌入式系统中。Intel e1000系列是Intel生产的一组高性能千兆位乙太网控制器芯片,包括e1000、e1000e和82574等型号,适用于桌面计算机、服务器和嵌入式系统。这两种网卡芯片均具有集成的MAC(Media Access Control)功能,用于管理数据链路层的访问和控制,以及PHY(Physical Layer)功能,用于处理物理层的信号传输和解调。它们同时具备MAC和PHY功能。
移植准备
IGH最新稳定版1.6源码下载地址:
https://gitlab.com/etherlab.org/ethercat/-/archive/stable-1.6/ethercat-stable-1.6.tar.gz
准备Linux-4.1.15内核源码,(编译驱动模块需要) 我的路径:
/root/test/imax6ul/linux开发板提供的gcc交叉编译工具链:
/opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi如果还想要给内核打上实时性补丁包,可以在这找到:Index of /pub/linux/kernel/projects/rt/4.14/
#为内核源码打上实时补丁
cd linux
patch -p 1 -i ../patch-4.10.199-rt97.patch至此,准备工作完成。
源码编译过程
先加载编译环境变量,直接执行以下指令即可。
source /opt/fsl-imx-x11/4.1.15-2.1.0/environment-setup-cortexa7hf-neon-poky-linux-gnueabi执行完成后, arm-poky-linux-gnueabi-gcc已经加入到环境变量中了。可以在命令行输出echo $CC试试看,输出了arm-poky-linux-gnueabi-gcc,说明环境已经生效了。

编译主站程序和协议栈
# EtherCAT 源码存放目录为:/root/test/ethercat/ethercat-stable-1.6
# Linux-4.1.15 源码存放目录为:/root/test/imax6ul/linux/ linux-4.1.15
tar -zxvf ethercat-stable-1.6.tar.gz # 解压源码 /root/test/ethercat/ethercat-stable-1.6
cd ethercat-stable-1.6
# --prefix是指定你下面make install时的安装目录,--with-linux-dir是指定你的linux内核目录
./configure --prefix=/root/test/ethercat/output --with-linux-dir=/root/test/imax6ul/linux --enable-8139too=no --enable-generic=yes --host=arm-poky-linux-gnueabi
make # 编译主站和协议栈源码
make install #安装到指定目录
经过上面的交叉编译,只是编译出了主站协议栈库和自带主站工具及程序,但是这还不算完。
ethercat:可执行程序是用于配置和管理 EtherCAT 主站(IGH 主站)的命令行工具。
ethercatctl:是一个用于控制 EtherCAT Master 运行状态的命令行工具。它提供了启动、停止、重启 EtherCAT Master 等操作的命令,用于管理 EtherCAT Master 的运行。
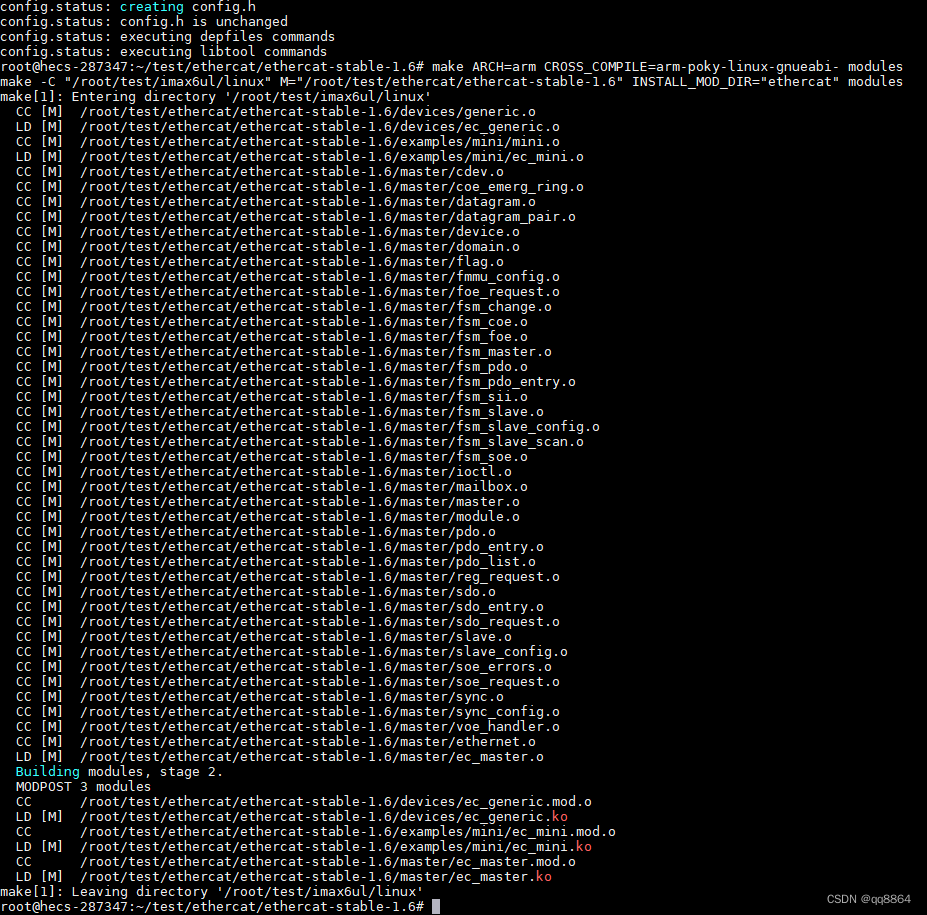
经过上面的编译,编译出来的内容如下图所示:


库和头文件:


linux内核驱动模块还没出来,所以直接是运行不起来的,还需要编译出内核网络驱动模块。
编译内核驱动模块
#编译网卡驱动模块
# 指定交叉编译工具,编译modules
make ARCH=arm CROSS_COMPILE=arm-poky-linux-gnueabi- modules # 编译通过会对应生成ethercat-stable-1.6/devices/ec_generic.ko和ethercat-stable-1.6/master/ec_master.ko
sudo make install # 在该目录下生成output目录
成功编译出了ec_master.ko 和 ec_generic.ko的linux驱动模块。
ec_master.ko:用于支持 EtherCAT 主站运行的 Linux 内核模块。它实现了 EtherCAT 主站协议栈,允许在 Linux 系统上与 EtherCAT 从站设备进行实时通信和数据交换。主要负责存储一些ethercat从站信息,管理domains域,管理从站配置等有关于ethercat系统的资源,在/etc/sysconfig/ethercat中配置的MASTER0_DEVICE会作为该模块参数传入主站模块,最终成为主站模块的mac使用网络地址,即master->macs;
ec_generic.ko,经由系统网络栈利用标准以太网 (Ethernet) 的网络驱动程序。
ec_generic,这个通用的驱动文件是在TCP/IP协议栈接口之上进行调用的,所以会走TCP/IP协议栈,会影响实时性。正式用应优化网卡驱动,在网卡驱动上直接支持IgH接口。
放到板子上运行
复制ec_generic.ko和ec_master.ko到/lib/modules/内核版本号,复制ethercat到usr/local/bin目录下。安装通用网卡驱动,配置rules,创建设备号。
操作步骤
# 在/root/test/ethercat目录下创建modules文件夹,并复制ec_generic.ko和ec_master.ko到modules下
mkdir -p output/modules
cp devices/ec_generic.ko output/modules/
cp master/ec_master.ko output/modules/
# 将output文件夹打包,传输到开发板(nfs/tftp/scp)
tar -cjf output.tar.bz2 output/
-------------------------------------------------------------------------------------------------------------------------------------
# 开发板上执行
tar -jxvf output.tar.bz2
cp output/modules/ec_generic.ko /lib/modules/4.1.15
# 复制ec_master.ko到/lib/modules/内核版本号/
cp output/modules/ec_master.ko /lib/modules/4.1.15 # 内核版本可以通过uname -r 查看
depmod
ln -fs output/etc/init.d/ethercat /etc/init.d/ # 创建链接,相比于复制节省内存空间
ln -fs output/bin/ethercat /usr/local/bin/
mkdir /etc/sysconfig
ln -fs output/etc/sysconfig/ethercat /etc/sysconfig/
# 配置rules,创建设备号
echo KERNEL==\"EtherCAT[0-9]*\", MODE=\"0664\" > /etc/udev/rules.d/99-EtherCAT.rules
# 获取板子MAC地址
ifconfig
# eth2 Link encap:以太网 硬件地址 00:0c:29:01:69:aa
-------------------------------------------------------------------------------------------------------------------------------------
# 启动EtherCAT
# 配置主站的MAC地址
modprobe ec_master main_devices=1E:ED:19:27:1A:B3
# 启动ethercat
/etc/init.d/ethercat start
# 安装通用网卡驱动
insmod output/modules/ec_generic.ko
# 通过ethercat查看信息
Ethercat --help
运行测试
通过网线直连ethercat主从站,从站启动完成后,启动ethercat。
/etc/init.d/ethercat start下面就可以使用 ethercat 工具来进行一些操作了。
sudo ethercat cstructethercat 命令行
EtherCAT 命令行在 《EtherCAT IGH 1.52.pdf》中的 <7.1 Command-line Tool> 也有很详细的一个介绍。在编译和安装IGH的时候,如果不修改默认的编译参数,那么就是会提供 EtherCAT 命令行工具的。每个主站的实例都有生成一个字符设备,名字为:/dev/EtherCATx, 其中 x ∈ {0 . . . n}为主站实例的索引。
常用命令介绍
ethercat master
该命令行用来显示主站和以太网设备信息。
列出主站状态:
ethercat slaves列出连接的从站:
ethercat cstructethercat sdos
该命令行用来输出当前驱动器支持的所有的SDO信息。
举例:
@:~$ ethercat upload 0x2001 0x0000
0x03e8 1000
解析:读取从站0中索引号为 0x2001(16位),子索引号为00(8位)的SDO条目。返回的参数值为 1000。
注意:必须有从站连接才能使用此命令,不运行应用程序也可以使用。
ethercat download
该命令行用以向指定的从站 SDO 中的子索引中写入相应的参数值。
例子:
向从站0的索引号为0x6060(16位),子索引号为00(8位)的地址写入参数值"0x08"。
@:~$ sudo ethercat download -t int16 -p 0 0x6060 00 08
有的SDO 可能是由于厂家的限制,不能写入参数。
@:~$ sudo ethercat download -t uint16 0x2008 0x0000 0x000f
SDO transfer aborted with code 0x08000021: Data cannot be transferred or stored to the application because of local control注意:必须有从站连接才能使用此命令,不运行应用程序也可以使用。
@:~$ ethercat sdos
SDO 0x1000, "Device type"
0x1000:00, r-r-r-, uint32, 32 bit, "Device type"
SDO 0x1001, "Error register"
0x1001:00, r-r-r-, uint8, 8 bit, "Error register"
SDO 0x1008, "Device name"
0x1008:00, r-r-r-, string, 72 bit, "Device name"
SDO 0x1009, "Hardware version"
0x1009:00, r-r-r-, string, 24 bit, "Hardware version"
SDO 0x100a, "Software version"
0x100a:00, r-r-r-, string, 32 bit, "Software version"
SDO 0x1010, "store parameters"
0x1010:00, r-r-r-, uint8, 8 bit, "SubIndex 000"
0x1010:01, rwrwrw, uint32, 32 bit, "save all parameters"
0x1010:02, rwrwrw, uint32, 32 bit, "save communication parameters"
0x1010:03, rwrwrw, uint32, 32 bit, "save application parameters"
0x1010:04, rwrwrw, uint32, 32 bit, "save manufacturer defined parameters"
..............
SDO 0x6007, "Abort_connection_option_code"
0x6007:00, rwrwrw, int16, 16 bit, "Abort_connection_option_code"
SDO 0x603f, "errorcode"
0x603f:00, r-r-r-, uint16, 16 bit, "errorcode"
SDO 0x6040, "controlword"
0x6040:00, rwrwrw, uint16, 16 bit, "controlword"
SDO 0x6041, "statusword"
0x6041:00, r-r-r-, uint16, 16 bit, "statusword"
..............
ethercat pdos
该命令行用来显示出同步管理器的参数和PDO分配和映射信息。
ethercat upload
该命令行用以读取指定从站相应PDO设定的参数值。
其他一些命令,参考:EtherCAT IGH 命令行介绍_igh ethercat-CSDN博客
@:~$ ethercat --help
alias Write alias addresses.
config Show slave configurations.
crc CRC error register diagnosis.
cstruct Generate slave PDO information in C language.
data Output binary domain process data.
debug Set the master's debug level.
domains Show configured domains.
download Write an SDO entry to a slave.
eoe Display Ethernet over EtherCAT statictics.
foe_read Read a file from a slave via FoE.
foe_write Store a file on a slave via FoE.
graph Output the bus topology as a graph.
ip Set EoE IP parameters.
master Show master and Ethernet device information.
pdos List Sync managers, PDO assignment and mapping.
reg_read Output a slave's register contents.
reg_write Write data to a slave's registers.
rescan Rescan the bus.
sdos List SDO dictionaries.
sii_read Output a slave's SII contents.
sii_write Write SII contents to a slave.
slaves Display slaves on the bus.
soe_read Read an SoE IDN from a slave.
soe_write Write an SoE IDN to a slave.
states Request application-layer states.
upload Read an SDO entry from a slave.
version Show version information.
xml Generate slave information XML.
Global options:
--master -m <master> Comma separated list of masters
to select, ranges are allowed.
Examples: '1,3', '5-7,9', '-3'.
Default: '-' (all).
--force -f Force a command.
--quiet -q Output less information.
--verbose -v Output more information.
--help -h Show this help.
Numerical values can be specified either with decimal (no
prefix), octal (prefix '0') or hexadecimal (prefix '0x') base.
Call 'ethercat <COMMAND> --help' for command-specific help.
测试效果
网上有一组测试效果,连接五个从站,主站单次收发数据的平均耗时以及实时性。测试主站单次收发数据的平均耗时的程序每隔 100 μs 发送并接收一次过程数据,如此每循环 10000 次记录一下当前时间,相邻两次记录的时间间隔减去其间空闲时间 100 μs × 10000 = 1 s 再除以收发次数 10000 便得到单次收发数据的平均耗时,使用三种不同的网卡驱动,三种情形下的大致结果如下表:

主站测试代码
#include <errno.h>
#include <signal.h>
#include <stdio.h>
#include <string.h>
#include <sys/resource.h>
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
/****************************************************************************/
#include "ecrt.h"
/****************************************************************************/
// Application parameters
#define FREQUENCY 100
#define PRIORITY 1
// Optional features
#define CONFIGURE_PDOS 1
/****************************************************************************/
// EtherCAT
static ec_master_t *master = NULL;
static ec_master_state_t master_state = {};
static ec_domain_t *domain1 = NULL;
static ec_domain_state_t domain1_state = {};
static ec_domain_t *domain2 = NULL;
static ec_domain_state_t domain2_state = {};
static ec_slave_config_t *sc;
static ec_slave_config_state_t sc_ana_in_state = {};
// Timer
static unsigned int sig_alarms = 0;
static unsigned int user_alarms = 0;
/****************************************************************************/
// process data
static uint8_t *domain1_pd = NULL;
static uint8_t *domain2_pd = NULL;
#define BusCouplerPos 0, 0
#define TI_AM3359ICE 0xE000059D, 0x54490001
// offsets for PDO entries
static unsigned int off_dig_out2;
static unsigned int off_dig_in2;
static unsigned int counter = 0;
static unsigned int blink = 0x00;
/*****************************************************************************/
#if CONFIGURE_PDOS
ec_pdo_entry_info_t slave_0_pdo_entries[] = {
{0x7010, 0x00, 32},
{0x6000, 0x00, 4*8},
};
ec_pdo_info_t slave_0_pdos[] = {
{0x1601, 1, slave_0_pdo_entries + 0},
{0x1a00, 1, slave_0_pdo_entries + 1},
};
static ec_sync_info_t slave_0_pdo_syncs[] = {
{2, EC_DIR_OUTPUT, 1, slave_0_pdos + 0},
{3, EC_DIR_INPUT, 1, slave_0_pdos + 1},
{0xff}
};
#endif
/*****************************************************************************/
void check_domain1_state(void)
{
ec_domain_state_t ds;
ecrt_domain_state(domain1, &ds);
if (ds.working_counter != domain1_state.working_counter)
printf("Domain1: WC %u.\n", ds.working_counter);
if (ds.wc_state != domain1_state.wc_state)
printf("Domain1: State %u.\n", ds.wc_state);
domain1_state = ds;
}
/*****************************************************************************/
void check_domain2_state(void)
{
ec_domain_state_t ds;
ecrt_domain_state(domain2, &ds);
if (ds.working_counter != domain2_state.working_counter)
printf("Domain2: WC %u.\n", ds.working_counter);
if (ds.wc_state != domain2_state.wc_state)
printf("Domain2: State %u.\n", ds.wc_state);
domain2_state = ds;
}
/*****************************************************************************/
void check_master_state(void)
{
ec_master_state_t ms;
ecrt_master_state(master, &ms);
if (ms.slaves_responding != master_state.slaves_responding)
printf("%u slave(s).\n", ms.slaves_responding);
if (ms.al_states != master_state.al_states)
printf("AL states: 0x%02X.\n", ms.al_states);
if (ms.link_up != master_state.link_up)
printf("Link is %s.\n", ms.link_up ? "up" : "down");
master_state = ms;
}
/*****************************************************************************/
void check_slave_config_states(void)
{
ec_slave_config_state_t s;
ecrt_slave_config_state(sc, &s);
if (s.al_state != sc_ana_in_state.al_state)
printf("AnaIn: State 0x%02X.\n", s.al_state);
if (s.online != sc_ana_in_state.online)
printf("AnaIn: %s.\n", s.online ? "online" : "offline");
if (s.operational != sc_ana_in_state.operational)
printf("AnaIn: %soperational.\n",
s.operational ? "" : "Not ");
sc_ana_in_state = s;
}
/*****************************************************************************/
void cyclic_task()
{
// receive process data
ecrt_master_receive(master);
ecrt_domain_process(domain1);
ecrt_domain_process(domain2);
// check process data state (optional)
check_domain1_state();
check_domain2_state();
// if (counter) {
// counter--;
// } else { // do this at 1 Hz
counter = FREQUENCY;
// calculate new process data
blink ++;
// check for master state (optional)
check_master_state();
// check for islave configuration state(s) (optional)
check_slave_config_states();
// printf("AnaIn: value=0x%x\n", EC_READ_U32(domain2_pd + off_dig_in2));
printf("AnaIn: value=0x%x\n", EC_READ_U32(domain2_pd + off_dig_in2));
//printf("AnaIn: value=0x%x\n", EC_READ_U32(domain2_pd + off_dig_in2 + 4));
EC_WRITE_U32(domain1_pd + off_dig_out2, blink);
// printf("AnaIn: value=0x%x\n", EC_READ_U32(domain1_pd + off_dig_out2));
// }
// send process data
ecrt_domain_queue(domain1);
ecrt_domain_queue(domain2);
ecrt_master_send(master);
}
/****************************************************************************/
void signal_handler(int signum) {
switch (signum) {
case SIGALRM:
sig_alarms++;
break;
}
}
/****************************************************************************/
int main(int argc, char **argv)
{
struct sigaction sa;
struct itimerval tv;
master = ecrt_request_master(0);
if (!master)
return -1;
domain1 = ecrt_master_create_domain(master);
if (!domain1)
return -1;
domain2 = ecrt_master_create_domain(master);
if (!domain2)
return -1;
#if CONFIGURE_PDOS
if (!(sc = ecrt_master_slave_config(
master, BusCouplerPos, TI_AM3359ICE))) {
fprintf(stderr, "Failed to get slave configuration.\n");
return -1;
}
if (ecrt_slave_config_pdos(sc, EC_END, slave_0_pdo_syncs)) {
fprintf(stderr, "Failed to configure PDOs.\n");
return -1;
}
printf("Configuring PDOs...\n");
// Create configuration for bus coupler
off_dig_out2 = ecrt_slave_config_reg_pdo_entry(sc,
0x7010, 0, domain1, NULL);
if (off_dig_out2 < 0)
return -1;
off_dig_in2 = ecrt_slave_config_reg_pdo_entry(sc,
0x6000, 0, domain2, NULL);
if (off_dig_in2 < 0)
return -1;
#endif
printf("Activating master...\n");
if (ecrt_master_activate(master))
return -1;
if (!(domain1_pd = ecrt_domain_data(domain1))) {
return -1;
}
if (!(domain2_pd = ecrt_domain_data(domain2))) {
return -1;
}
sa.sa_handler = signal_handler;
sigemptyset(&sa.sa_mask);
sa.sa_flags = 0;
if (sigaction(SIGALRM, &sa, 0)) {
fprintf(stderr, "Failed to install signal handler!\n");
return -1;
}
printf("Starting timer...\n");
tv.it_interval.tv_sec = 0;
tv.it_interval.tv_usec = 1000000 / FREQUENCY;
tv.it_value.tv_sec = 0;
tv.it_value.tv_usec = 2000;
if (setitimer(ITIMER_REAL, &tv, NULL)) {
fprintf(stderr, "Failed to start timer: %s\n", strerror(errno));
return 1;
}
printf("Started.\n");
while (1) {
pause();
while (sig_alarms != user_alarms) {
cyclic_task();
user_alarms++;
}
}
return 0;
}
/****************************************************************************/
/***********IGH demo编译*****************/
arm-linux-gnueabi-gcc main.c -o ethercat_test -I../../ethercat/include/ -L../..ethercat/lib -lethercatIGH在Linux应用空间的其他使用
参考EtherCAT源码下的example。
git clone https://gitee.com/wllw7176/MyEthercat-IGH-1.5.2.git参考EtherCAT二次开发的源代码
其他资源
EtherCAT使用与解析-ethercat系统内核模块加载与初始化操作_ec_generic.ko-CSDN博客
https://www.cnblogs.com/wujingcqu/p/16295570.html
https://blog.51cto.com/u_15858333/6406909
IgH详解 一、概述-CSDN博客
EtherCAT设备协议详解二、EtherCAT状态机及配置流程-CSDN博客
在x86-64和arm64 Linux上调试IgH EtherCAT主站软件以及实现星形走线连接多从站 - 知乎
ethercatpack/mytest/test_ethercat.c · wllw7176_gitee/MyEthercat-IGH 1.5.2 - Gitee.com
https://pwl999.blog.csdn.net/article/details/109397917
IgH EtherCAT主站开发案例分享——基于NXP i.MX 8M Mini - 知乎
开源工业以太网现场总线协议栈汇总_soes从站模拟器-CSDN博客
raspberry pi RT-Linux平台搭建IgH环境_一种用于igh的网络驱动系统及方法与流程-CSDN博客
EtherCAT主站IgH解析(一)--主站初始化、状态机与EtherCAT报文_igh ethercat-CSDN博客
EtherCAT IGH 命令行介绍_igh ethercat-CSDN博客
LinuxCNC搭配Igh EtherCat Master开源Ethercat主站通讯控制测试_linuxcnc igh-CSDN博客
【虹科干货】使用Profishark进行EtherCAT主站性能测试 – 宏网络安全信息门户网站2
基于Zynq平台的igh EtherCAT主站的配置和使用方法,包括Preempt RT和Xenomai两种实时内核的介绍和配置示例_ethercat1.5.2中文-CSDN博客
https://www.cnblogs.com/tdyizhen1314/p/17628400.html