一。普通电机选型
普通电机选型(一)
三相异步电机
定子:产生旋转磁场
转子:切割磁场,产生洛伦兹力
结构简单,成本低,稳定
效率较低,转速不稳定
N=60f/P
定子旋转速度:1500
转子旋转速度:1450
优点:结构简单,成本低廉
矽钢片和硅钢片是一种东西
同步电机:转子自己励磁或者永磁,转子转速与磁场转速一致,效率高,转速稳定,转速高
普通电机:
三相、单相异步电机
减速电机(电机加减速器)
交流电机和直流电机
微型:直流电机
碳刷电机:普通直流
无刷电机:高转速场合,低噪音场合(寿命是碳刷电机的6倍以上)
永磁电机
励磁电机
调速电机:
降压调速:通过调整电机的输入电压,改变电机转矩
变极调速:有级调速。P越小,转速越高,转速越高,扭矩越小
变频电机:改变电流频率,实现变速
单相异步电机(200W)(用的最多)
同步电机:反复启停,反复正反转,运行平缓,高转速
电磁制动电动机(抱闸电机):可以快速停止,绝对停止
力矩电机:转速随负载变化,恒力矩输出
控制力矩的方法:
1.力矩电机
2.磁粉离合器:配合电机使用,一般用于收卷,可以控制力矩不变
磁粉制动器:单独使用,一般用于放料(卷料、铜线)
3.O型皮带(打滑皮带)
减速电机:德国四大减速机S R F K 四大系列
S系列蜗轮蜗杆减速机
输出转速:0.1-397RPM
输出转矩:70NM-4200NM
功率:0.12KW-252KW
自锁能力
R系列同轴减速机
输出转速:0.05-1829rpm
输出转矩:50-18000NM
功率:0.09kw-160kw
F系列
输出转速:0.1-752rpm
输出转矩:130-18000NM
功率:0.12kw-200kw
K系列
直角伞齿轮
输出转速:0.1-522rpm
输出转矩:200-50000NM
功率:0.12-200kw
IP等级(i 防尘、p 液体防护)
IP68
IP44、IP54 (一般用这两个)
在工厂内:高于IP23
户外使用条件:IP54
防护等级越高,散热越差,成本越高
普通电机选型(二)
国产电机品牌:
1、兰州-兰州电机
2、上海-上海电机
3、重庆-赛力盟
4、湖南-湖南湘电
5、安徽-皖南电机
6、河北-掹牛电机
7、山东-华力电机
8、南阳防爆
9、佳木斯电机
10、台湾-东元、台创、晟邦(城邦)、万鑫
国外电机品牌:
1、瑞典-ABB
2、德国-西门子、力士乐、啸驰、诺德、赛威
3、日本-安川、三菱、三洋、松下、富士
电机选型流程:
一、选择电机类型
1.小负载输送机:单相异步电机,调速电机
2.中大型输送机:三相异步电机,变频电机
3.收料机:力矩电机(堵转) 伺服力矩控制(打螺丝机,拧紧伺服)
4.反复启停、反复正反转:同步电机
5.低转速大扭矩输出:减速电机
6.一般精度一般转速控制:步进电机
7.高精度高转速控制:伺服电机
8.高精度,高扭矩:DD马达
二、工况分析及计算
1.小负载:计算功率
摩擦力 外力 皮带张紧力
2.中大负载:计算扭矩及转速
P=TxN/9550
T:扭矩 N·M
N:转速 r/min rpm
P:功率 KW 千瓦
三、减速比计算
1.皮带带轮
2.丝杆传动:导程
3.齿轮减速:减速比 涡轮
4.同步带、链轮
减速机:通过降低转速,提高扭矩
重力:G=mg
m=质量 kg
g=9.8 10
摩擦力:F=μmg
μ:摩擦系数 钣金(钢板)0.2 滚筒0.1 滚珠丝杆、直线轴承0.05
加速力:F=ma
加速度:a=V/t
功率(P)计算:
直线功率:
P=F·V
F:摩擦力
V:直线运输速度
旋转功率:
P=T·ω
T:扭矩
ω:角速度
扭矩、转矩(T) 计算:
T=F·L
F:顶端输出力
L:力臂长度
T=F·R
齿轮,皮带轮,皮带辊
F传递的力
R半径
除了皮带辊以外,其他的传动均属于减速机构
拓展:
滚珠丝杆匀速力矩
T=Pb·(μmg+F)/2π
μmg:摩擦力(摩擦力不可忽略)
F外力
Pb导程
皮带张紧力:F=0.33μmg
因皮带张紧而导致传动系统所增加的额外负载
匀速直线运动所需要的克服的力(摩擦力、皮带张紧力)
加速扭矩:T=J·β
J:直线惯量+转动惯量
β:角加速度
β=ω/t
t:加速时间
ω=2πN/60
N转速
惯量(电机转动会产生惯量):
空心轴:J=mr^2
均质圆柱体惯量:
计算负载的时候可以放大,不能缩小
滚珠丝杆、皮带辊 全惯性惯量:
J = M(A/2Π)^2
A:电机没转一圈 物体直线运动的距离
丝杆:A=Pb(导程)
皮带辊:A=周长
M:质量
皮带机中的电机选型:
已知条件:
皮带输送机上的负载重量:200kg
皮带输送机所用皮带重量:10kg
皮带与支撑的摩擦系数μ:钣金、型材0.2 滚筒0.1
皮带输送机工况安全系数:K(小负载2-3,大负载4-10) 一般选 4
皮带输送机的传动的效率:0.75(综合考虑,可小不可大)
皮带输送机所用滚筒直径:D=89mm
皮带输送机输送速度:V=0.25m/s
安全系数:计算时省略的越多,安全系数越大
摩檫力计算:
P=F·V
F=摩擦力+皮带张力
F=μmg+0.33μmg
=0.1·210kg·9.8+0.33(0.1·210kg·9.8)
匀速直线运动时克服的力 =273.714N
理论电机功率:
P=F·V
=273.714 x 0.25
=68.42 W
电机实际功率(P)=P·K/效率
效率:传动过程中产生的损耗(驱动传动部分所需要的基础功率)
K:安全系数 (小负载2-3,大负载4-10)
电机实际功率(P) = 68.42 x 4/0.75=364.9 W
实际功率是算出来了,但是电机的转速是1400转/分钟,但是这里没有算减速器。
如果算的更加严格一点,绝对会比364.9W低,但是364.9W绝对是够用的
拓展:如果算的更加严格,还需要算下面的东西
效率:轴承(一对) 0.95
减速机0.9
滚珠丝杆0.98
梯形丝杆0.4-0.6
蜗轮蜗杆0.2-0.4 不确定
同步带:0.9
工况系数:与海拔、工作制、环境温度、启动系数有关
皮带材质:

PVC( 聚氯乙烯) 整体防静电处理 -10-80度 工业 烟草 物流 包装 便宜 缺点:不耐油,有毒
PU 聚氨酯 (优力胶) -20-80度 耐油性好一点 粮食,工业 ,果蔬肉类
PE 聚乙烯 100度 无毒分解后也无毒 食品 医药
橡胶皮带 -15 -130度 户外(但不耐低温) 便宜 强度高 矿山冶金煤炭沙场 重型运输 摩擦力大
硅胶皮带 -70 -280度 航天化工 冶金 电气绝缘 很贵 较软
皮带支撑:
低速轻载 用钣金
低速轻载 用型材
高速重载 成本高 用滚筒
混合支撑 滚筒+钣金 中速中载 性价比
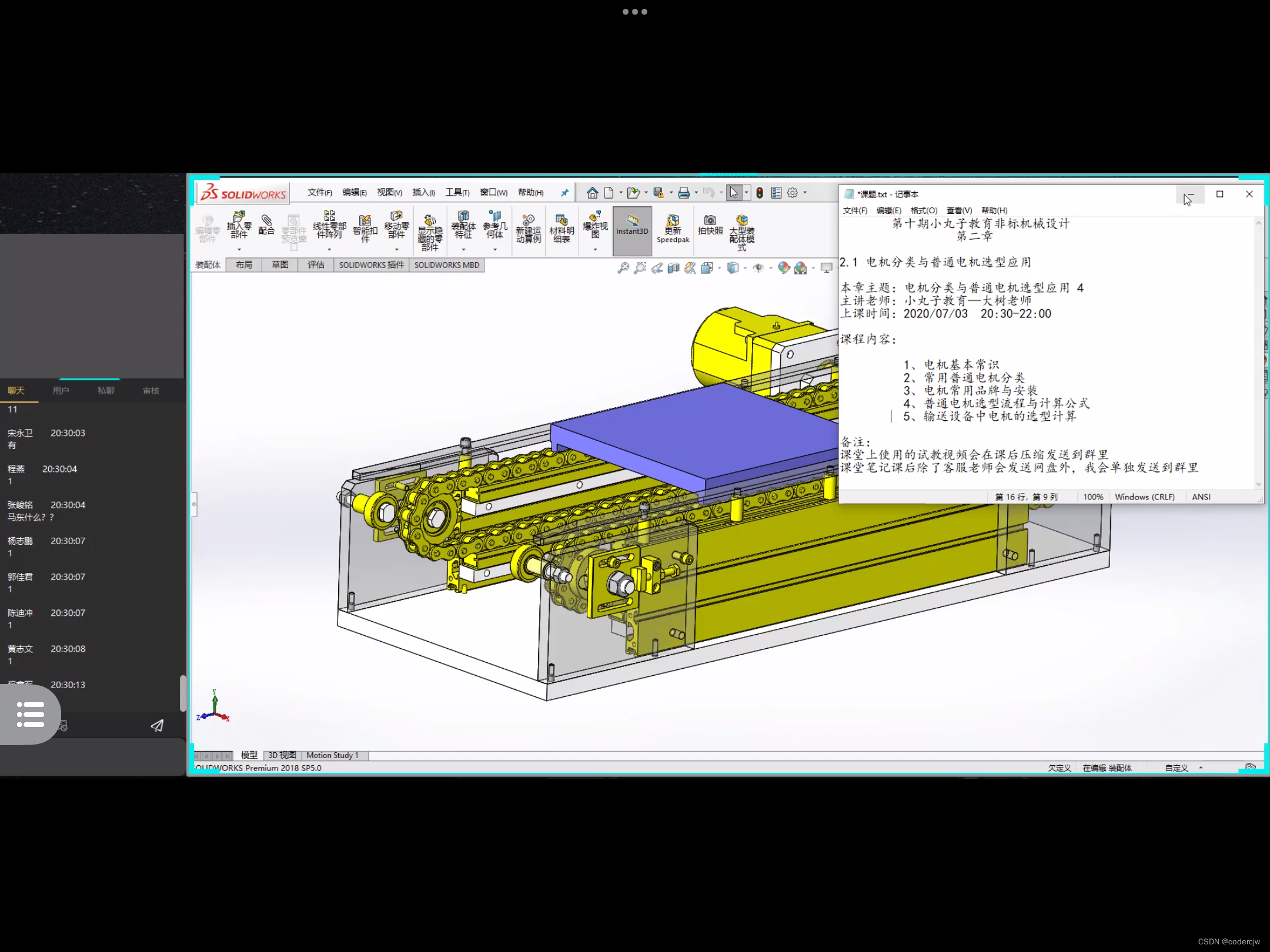
普通电机选型(三)
板链输送机
1.皮带容易撕裂、刺穿、开裂 板链可以快速更换
维护简单
2.板链耐腐蚀优良
3.转弯能力优良

板链输送机中的电机选型 :
已知条件:
板链输送机的滞留部分负载重量 M1=30kg
板链输送机的传送部分负载重量 M2=70kg
板链输送机的滞留部分板链重量 M3=20kg
板链输送机的传送部分板链重量 M4=20kg
板链输送机的回流部分板链重量 M5=40kg
板链输送机所用板链重量M =板链每米重量(kg/m)·长度(m)
板链与负载间的摩擦系数 μ1=0.2
板链与滑轨间的摩擦系数 μ2=0.2
板链输送机工况安全系数 K=2(小负载 2-3、大负载 4-6)
板链输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在板链输送机上速度 V=0.25m/s
板链输送机所用链轮直径 D=142mm
开始选型:
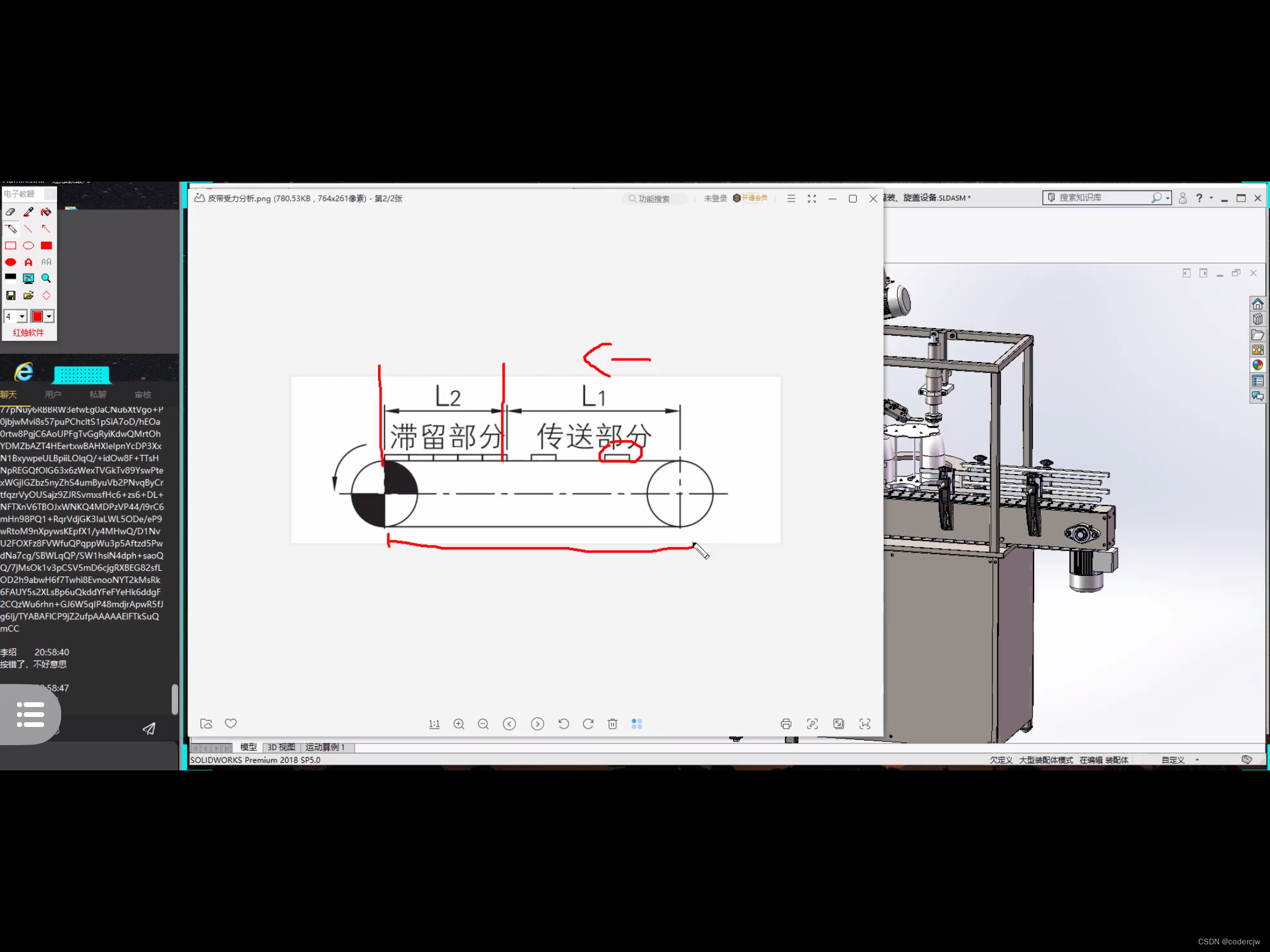
1.滞留部分(被挡板挡住的部分)受力分析(160N)
(板链+负载) 与导轨之间的摩擦力
(M1+M3)·μ2·g
(30kg+20kg)·0.2·10
=100N
板链与负载之间的摩擦力
M1·μ1·g
30·0.2·10
=60N
2.传送部分(板链上还没有被挡住的部分)受力分析(180N)
(板链+负载) 与导轨之间的摩擦力
(M2+M4)·μ2·g
(70+20)·0.2·10
=180N
3.回流部分(板链的下面往回走的部分)受力分析(80N)
空载状态下板链与导轨的摩擦力
M5·μ2·g
40·0.2·10
=80N
总摩檫力:160+180+80=420N
理论上的电机功率:
P=F·V
=420N·0.25m/s
=105W
电机实际功率P = 理论电机功率P ·工况系数K/效率
当(工况系数)K=2时 电机实际功率=280W
当(工况系数)K=4时 电机实际功率=560W
计算减速比:
先求电机转速:
N=V/(πD)
N:电机减速后输出转速 rpm(r/min)
V:板链输送速度 m/s
D: 链轮直径 m
电机减速后输出转速N=0.25 / 3.14 x 0.142
=0.56 转/秒 x 60
=33.7 转/分钟
电机减速比 = 电机转子转速/电机减速后输出转速
1400/33.7 = 41.5
减速比尽可能选小(输送速度大于预定速度)
计算出来41.5 选择减速比40-35
输送机速度高于预定速度一定范围内没关系
但是如果输送机速度低于预定速度,那么电机可能面临重选
变频一般不超过100HZ
在米思米官网输入 卧式齿轮减速电机,选三相电机,输入转速为35(转速选大一点没事),发现能选的只剩四款电机,功率只有400和750w两种,价格相差不大,不需要电磁刹车情况下,最终选750w电机型号,完成选型
倍速链中的电机选型:
倍速链:适用于高负载,高运行速度的输送机

已知条件:
倍速链输送机的滞留部分负载重量 M1=40kg
倍速链输送机的传送部分负载重量 M2=60kg
倍速链输送机的滞留部分链条重量 M3=2kg
倍速链输送机的传送部分链条重量 M4=2kg
倍速链输送机的回流部分链条重量 M5=4kg
倍速链输送机所用链条重量 M =链条每米重量(kg/m)·长度(m)
倍速链输送线长度 L=5m
有滞留时链条与负载间的摩擦系数 μ1=0.1
有滞留时链条与滑轨间的摩擦系数 μ2=0.2
无滞留时链条与滑轨间的摩擦系数 μ3=0.08
倍速链输送机工况安全系数 K=4(小负载 2-3、大负载 4-6)
倍速链输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在倍速链输送机上速度 V=0.25m/s
倍速链输送机所用链轮直径 D=82.2mm
开始选型:
1.滞留部分受力分析
(M1+M3)·μ2·g
(40+2)·0.2·10
=84N
负载与倍速链摩檫力:
M1·μ1·g
40·0.1·10
=40N
2.输送部分受力分析
(M2+M4)·μ3·g
(60+2)·0.08·10
=49.6N
3.回转部分受力分析
M5·μ3·g
4·0.08·10
=3.2N
总摩檫力:84+40+49.6+3.2=176.8N
链条输送速度:
V=物体输送速度/增速比
=0.25/2.5
=0.1 m/s
理论上的电机功率:
P=F·V
=176N·0.1
=17.6W
实际电机功率P = P·K/效率
P=17.6·4/0.75
=94W
计算减速比:
输出轴转速
N=V/πD
=0.1/(3.14·0.082)
=0.38 r/s x 60
=24 rpm
减速比:1400/24 = 58.33
一般选减速比为50就可以了,如果客户要求一定要58.33的减速比,那么就可以用下面的方法:
1.电机调速(调压、变频)
2.改变驱动轮直径(直径越大,速度越快)
拓展:
750W的电机,负载力需求500W,电机实际输出功率为500W
750W的电机,负载力需求1000W,电机过载,并且转速下降,电机开始发热损坏
链条输送机中的电机选型:
已知条件:
链条输送机上的负载重量 M1=50kg
链条输送机输送链条重量 M2=5kg
链条输送机回程链条重量 M3=5kg
链条输送机所用链条重量 M =链条每米重量(kg/m)·长度(m)
链条与滑轨间的摩擦系数 μ=0.2
链条输送机工况安全系数 K=3(小负载 2-3、大负载 4-6)
链条输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在链条输送机上速度 V=0.25m/s
链条输送机所用链轮直径 D=50.1mm
开始选型:
输送面的受力:
链条与导轨之间的摩檫力F=(负载+链条自重)*u*g=(50+5)*0.2*10=110N
回程面的受力:
链条自重 *u*g = 5*0.2*10 = 10N
总摩檫力:110+10 = 120N
理论最低功率:
P = F*v = 120*0.25 = 30W
电机实际功率:
P= P*K/效率
= 30*3/0.75
= 120W
减速比:
N=V/πD
= 0.25m/s / (3.14*0.05)
= 1.59r/s *60 = 95.5 r/min
减速比:1400/95.5 = 14.6
那么电机选型就完成了
拓展:
电源形式选择
普通负载:220V 交流
大负载: 380V 交流
微型电机:24V 直流
AGV小车: 24 / 48V 直流
普通电机启停频率,不得小于15s一次
电机高温 :
80-90度 正常情况
法兰式安装:省安装空间,适合电机自重较轻,负载较小
基座式安装:适合电机自重较重,负载较大
单相定速/调速电机:小负载皮带线
三相定速/变频电机:大负载输送
力矩电机:收料,张力控制场合
阻尼电机:频繁启停/正反转
刹车电机:绝对停止,快速停止
高温电机:适用于高温环境
真空型步进电机:-80到200度
刹车电机:
弹簧式:通电励磁-推开刹车盘-正常运行
弹簧推动刹车片-制动
永磁式:通电励磁-推开刹车盘-正常运行
永磁吸合,产生摩擦制动
永磁式发热小,适合长期使用,10000转,响应速度快,安装较为复杂
弹簧式发热大,5000转,响应速度慢,便宜
二。步进电机选型
步进电机选型(一)
步进电机:可以受控制的一个角度一个角度的转动
开环控制(步进电机):只管下命令,不管是否完成
一步:静止-加速-匀速-减速-停止
过载:加速-匀速-减速-丢步-停止(不会去理丢步)
闭环控制(伺服电机、混合步进电机):下命令以后,确保任务达成
一步:静止-加速-匀速-减速-停止
过载:静止-加速-匀速-减速-丢步-位置调整-相对静止(会及时调整位置)
价格相差不大,所以能选伺服电机就不选步进电机
80-90 摄氏度 正常
超过110-120度的时候,会导致转子消磁,转矩变小。
磁场锁不住转子---丢步
运行时间不超过50%,发热
24H小时:总动作时间不超过12H
设置/控制
严格控制脉冲数量--精确位置控制
严格控制脉冲频率--精确速度控制
怎么让步进电机实现闭环控制,就是外加编码器
外加编码器:反馈位置,反馈速度。当出现误差时,可以自动补偿
增量型(用的多、秒表式,便宜)
没有原位
仅限于单圈脉冲控制,多圈控制需要依靠
绝对值型(贵些)
全行程内,每一个位置都有独立的编码(有范围限定)
最高25位分辨率(2的25次方个脉冲)
精度要求较高
断电要求继续控制
机械式(钟表式)
电池+计数寄存器(设备断电)2-3年
韦根计数(磁极旋转,使线圈切割磁感线,产生脉冲)
闭环步进带编码器,但不仅仅是增加了编码器
旋转编码器:绕线机,绕线长度
40/50
光栅尺:直线电机、机床、高精度、成型工艺
步进电机( 2相 3相 5相)
磁式 一般 2相 步距角7.5°
反应式 一般 3相 步距角1.5° 已经被市场淘汰了
混合式
相数:电机定子的线圈组数
2相 1.8°/0.9° 200/400 脉冲数量 1.8度 200步走一圈 0.9度 400步走一圈
3相 1.5°/0.75° 240/480
4相 0.9°/0.45° 400/800 (可以使用2相驱动器)
5相 0.72°/0.36° 500/1000
2相:运行稳定一般,精度一般
5相:精度要求较高,低速运行平稳性要好
250rpm以下 低速振动、低频振动(与负载无关)
如何解决低频振动:
1.升级成更高相数步进电机
2.升级成伺服电机
3.加减速器:避开低速区
(需求转速输出 200rpm、选择减速比3的减速器,电机600rpm)
4.细分:解决低频振动、提高精度
并没有从根本上大幅度改善步进电机精度
通过步进驱动器控制磁场精确变化
驱动器最大256倍细分
常用 2倍(半步)、4倍(优化低速振动)
4倍是保持精度的极限
4倍以上是无法保证精度
所以我们要么选2相,要么选5相