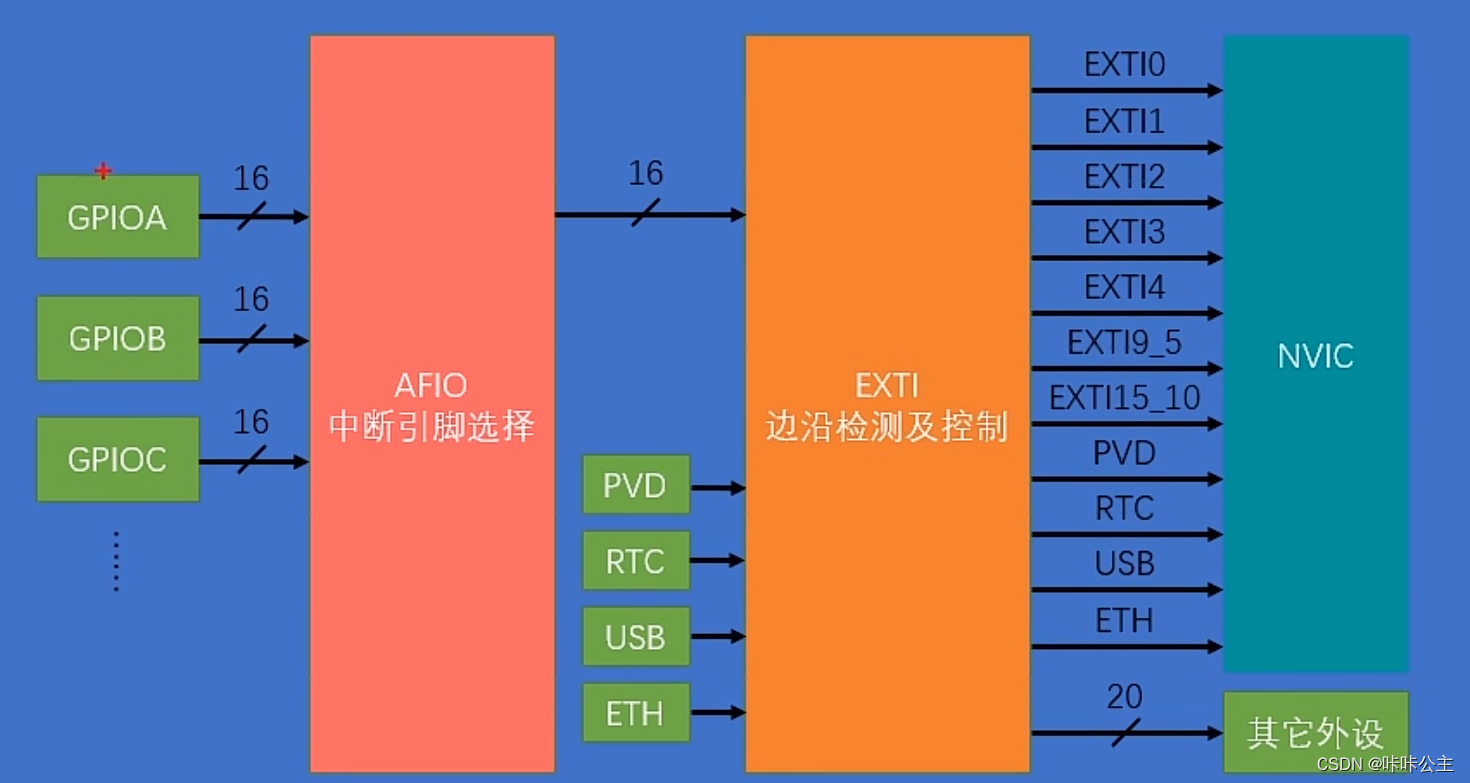
一.对射式红外传感器计次
1.原理
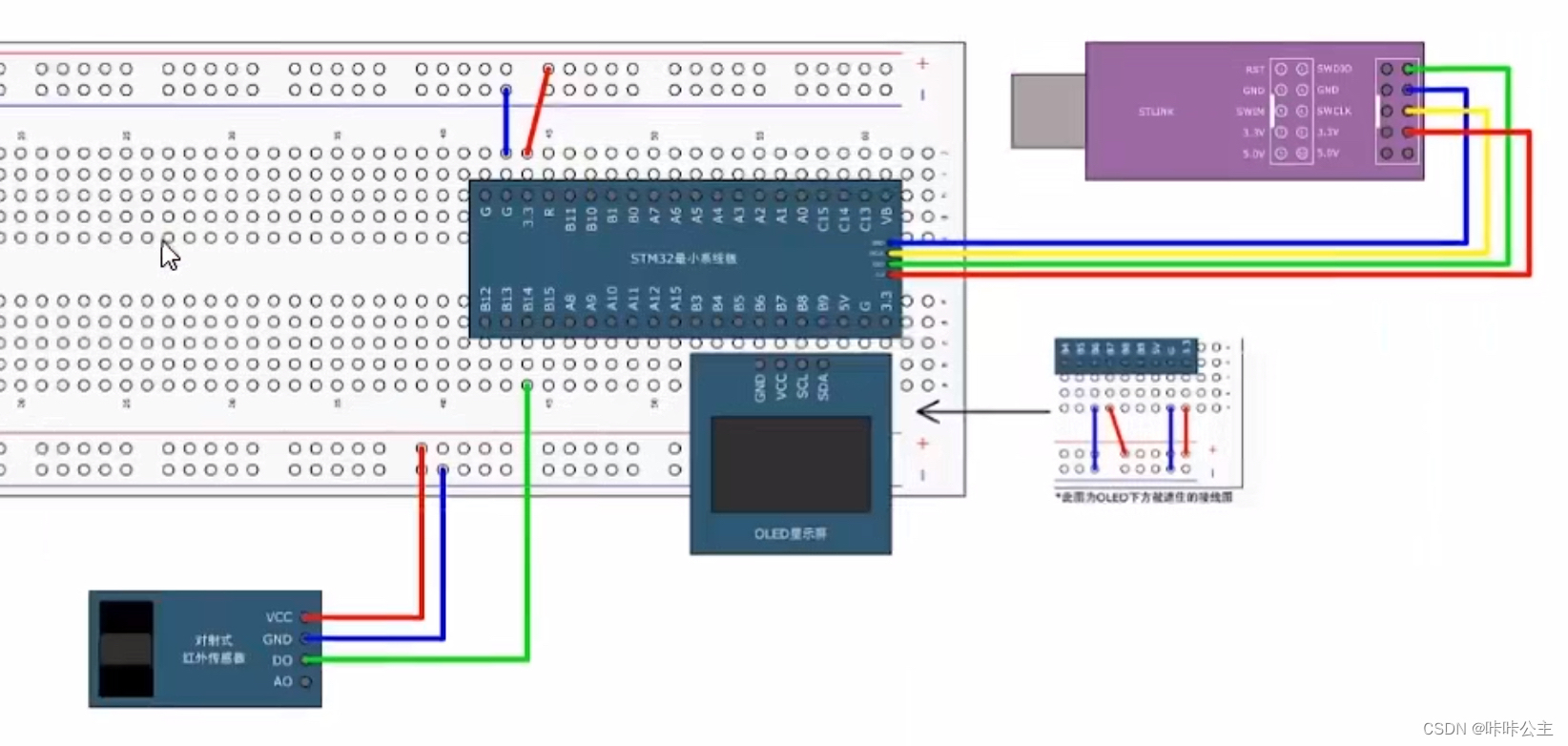
2.硬件连接
3.程序
CountSensor.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
uint16_t CountSensor_Count;
void CountSensor_Init(void)
{
//配置RCC时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//EXTI和NVIC时钟一直是打开的
//配置GPIO,端口为输入模式:
GPIO_InitTypeDef GPIO_InitStruture;
GPIO_InitStruture.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,可参考手册建议选择
GPIO_InitStruture.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStruture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruture);
//配置AFIO,选择用上一步的GPIO,连接到后面的EXTI:
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//配置AFIO的数据选择器
//将PB14号引脚的电平信号通过AFIO进入到EXTI
//配置EXTI(选择边沿触发方式,选择触发响应方式):
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_InitStructure);
//配置NVIC(选择优先级):
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//2 bits for pre-emption priority,2 bits for subpriority
//pre-emption抢占优先级 subpriority响应优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
uint16_t CountSensor_Get(void)
{
return CountSensor_Count;
}
void EXTI15_10_IRQHandler(void)//中断函数
{
if(EXTI_GetITStatus(EXTI_Line14)==SET)//进行中断标志位的判断
{
Delay_ms(300);//消抖
//开始中断函数:
CountSensor_Count ++;
EXTI_ClearITPendingBit(EXTI_Line14);//将中断标志位清除,以防无限中断
}
}
CountSensor.h:
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_H
void CountSensor_Init(void);
uint16_t CountSensor_Get(void);
#endif
main.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "CountSensor.h"
int main(void)
{
OLED_Init();
CountSensor_Init();
OLED_ShowString(1,1,"Count:");//显示字符串
while(1)
{
OLED_ShowNum(1,7,CountSensor_Get(),5);
}
}
二.旋转编码计次
1.硬件连接

2.程序
Encoder.c:
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void Encoder_Init(void)
{
//配置RCC时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//EXTI和NVIC时钟一直是打开的
//配置GPIO,端口为输入模式:
GPIO_InitTypeDef GPIO_InitStruture;
GPIO_InitStruture.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,可参考手册建议选择
GPIO_InitStruture.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStruture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruture);
//配置AFIO,选择用上一步的GPIO,连接到后面的EXTI:
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);//配置AFIO的数据选择器
//将PB0号引脚的电平信号通过AFIO进入到EXTI
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);//配置AFIO的数据选择器
//将PB1号引脚的电平信号通过AFIO进入到EXTI
//配置EXTI(选择边沿触发方式,选择触发响应方式):
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_InitStructure);
//配置NVIC(选择优先级):
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//2 bits for pre-emption priority,2 bits for subpriority
//pre-emption抢占优先级 subpriority响应优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStructure);
}
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
void EXTI0_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line0) == SET)
{
//防止抖动
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)//是的话就是反转
{
Encoder_Count --;
}
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) == SET)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0)//是的话就是反转
{
Encoder_Count ++;
}
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
Encoder.h:
#ifndef __ENCODER_H
#define __ENCODER_H
void Encoder_Init(void);
int16_t Encoder_Get(void);
#endif
main.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1,1,"Num:");//显示字符串
while(1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1,5,Num,5);
}
}
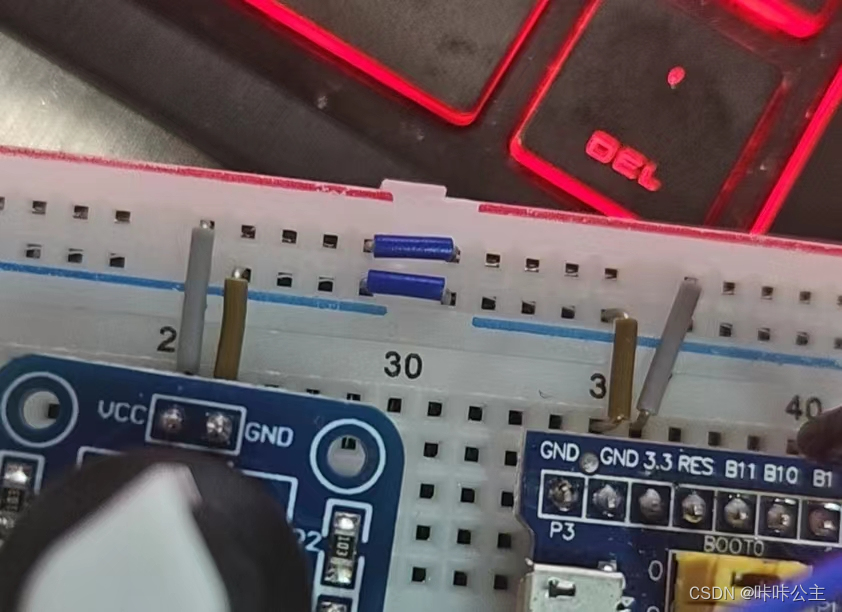
四.调试
出现了两个问题:
1.旋转无反应,调试发现因为有的面包板中间不相连,所以要用跳线相连。
2.旋转太慢时记不上数,最后在中断代码那里加了一个if语句防抖