摘要,此专利无可用的关键技术信息,基本都是下面几句话反复说。。。
本发明提供了一种机器人3D快速定位抓取方法及系统, 包括: 通过高速的3D结构光成像对目标物体的表面轮廓进行扫描, 形成点云数据;对所述点云数据进行智能分析处理; 根据智能化技术获取所述目标物体的实时空间坐标和姿态信息, 并引导机器人完成自动抓取任务。 本发明通过3D定位引导机器人抓取物体, 并根据三维特征定点放置通过; 3D视觉实现了三维扫描定位快速建立、 更换数据模型, 能够满足小批量多品种的生产需求, 还能智能分析物体的抓取优先级,引导工业机器人快速精准抓取工件, 有效解决上下层物体相互干扰的问题。
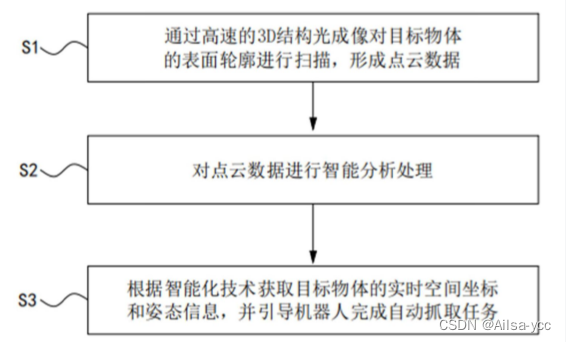
一种机器人3D快速定位抓取方法, 包括:
1)通过高速的3D结构光成像对目标物体的表面轮廓进行扫描, 形成点云数据;
2)对所述点云数据进行智能分析处理;加以AI算法、机器人路径自动规划、自动防碰撞等智能化技术;
3)根据智能化技术获取所述目标物体的实时空间坐标和姿态信息,计算出当前工件实时空间坐标,并引导机器人完成自动抓取任务。