简介:介绍 RS-LiDAR-16 16线激光雷达 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,如何打开使用RVIZ 查看点云数据,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。关于测试硬件EHub_tx1_tx2_E100载板请查看:EdgeBox_EHub_tx1_tx2_E100 开发板评测_机器人虎哥的博客-CSDN博客
大家好,我是虎哥,之前使用了很多单线激光雷达,这几年,3D激光雷达国产化后,逐步已经降价很多,3D激光雷达对于大环境导航,无人驾驶辅助导航,都有很多优势。经过逐步的删选,目前对于低速机器人小车类性价比,稳定性上来说,速腾的 RS-LiDAR-16 都算是标杆产品了,有感于网上对于上手就可以简单玩起来的说明比较少,所以总结一下自己的简单测试经验,分享给大家。当然,这款雷达已经停产,市面上还能找到一些,官方是推荐使用太阳神系列做全线替代。
目录
一、RS-LiDAR-16 16线激光雷达介绍
1.1 主要参数
1.2 设备电源
二、WIN端测试配置
2.1 获取WIN端的工具软件
2.2 RS_View上位机
2.3 链接雷达至测试电脑
2.4 RS_View上位机链接测试
2.5 RS_View 修改雷达网络参数
三、ROS下查看点云
3.1 建立工作空间
3.2 克隆代码
3.3 编译源码包(Compile with ROS catkin tools)
1、在 rslidar_sdk 包内 CMakeLists.txt ,设置变量 COMPILE_METHOD 为 CATKIN.
2、 在rslidar_sdk目录下复制 package_ros1.xml 为 package.xml
3、 编译工程
3.4 将板子IP修改到和雷达同一个网段
3.4 配置启动参数
3.4 启动驱动
一、RS-LiDAR-16 16线激光雷达介绍
1.1 主要参数
RS-LiDAR-16 采用混合固态激光雷达方式,集合了 16 个激光收发组件,测量距离高达150 米,测量精度+/- 2cm 以内,出点数高达 320,000 点/秒,水平测角 360°,垂直测角-15°~15°。RS-LiDAR-16 通过 16 个激光发射组件快速旋转的同时发射高频率激光束对外界环境进行持续性的扫描,经过测距算法提供三维空间点云数据及物体反射率,可以让机器看到周围的世界,为定位、导航、避障等提供有力的保障。

| 线数 | 16 | 激光波长 | 905nm |
|---|---|---|---|
| 激光安全等级 | Class 1 人眼安全 | 盲区 | ≤0.4m |
| 测距能力 | 150m(80m@10% NIST) | 精度(典型值) | Up to ±2cm |
| 水平视场角 | 360° | 垂直视场角 | 30° |
| 水平角分辨率 | 0.1°/0.2°/0.4° | 垂直角分辨率 | 2.0° |
| 帧率 | 5Hz/10Hz/20 Hz | 转速 | 300/600/1200rpm (5/10/20Hz) |
| 出点数 | ~300,000pts/s(单回波模式) ~600,000pts/s(双回波模式) | UDP数据包内容 | 三维空间坐标、反射强度、时间戳等 |
|---|---|---|---|
| 以太网输出 | 100 Mbps | 输出数据协议 | UDP packets over Ethernet |
| 工作电压 | 9V - 32V | 工作温度 | -30°C ~ +60°C |
|---|---|---|---|
| 产品功率 | 12W | 存储温度 | -40°C~ +85°C |
| 防护等级 | IP67 | 时间同步 | $GPRMC with 1PPS |
| 尺寸 | φ109mm * H80.7 mm | 重量 (不包含数据线) | ~0.87 kg |
1.2 设备电源
设备供电要求电压范围 9-32 VDC,推荐使用 12 VDC。
设备工作状态下功耗约为 9W(典型值)。
二、WIN端测试配置
2.1 获取WIN端的工具软件
网址入口:从它的官网资源中心,或者直接问问厂家要都可以

2.2 RS_View上位机

2.3 链接雷达至测试电脑
-
首先将激光雷达速腾RS-lidar-16与电脑网口相连
-
RS-lidar-16上电(12v)
-
RS-lidar-16官方默认的ip是192.168.1.200
-
通过以太网网口连接电脑

我自己测试的设备之前被改过IP,RS-lidar-16 测试时ip地址是192.168.10.200,工控机默认IP为192.168.10.10。工控机如果改为其它IP地址,则启动驱动程序后无法接收到点云。
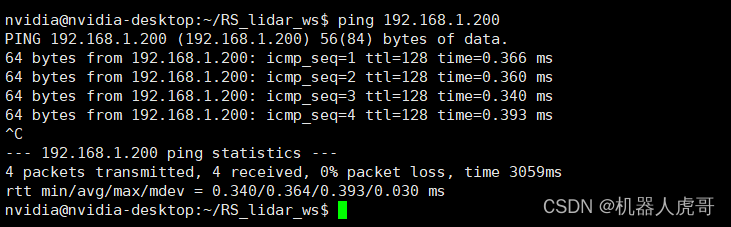
修改测试电脑为:192.168.10.10

可以Ping 通雷达。
2.4 RS_View上位机链接测试
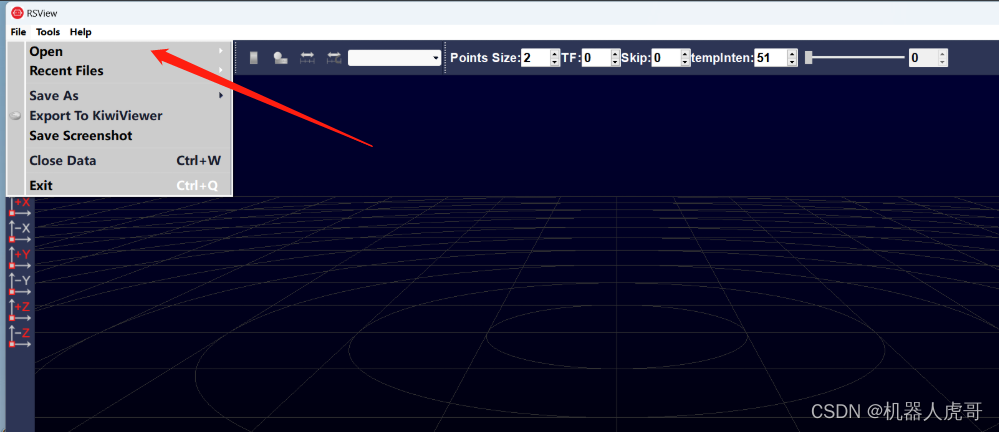


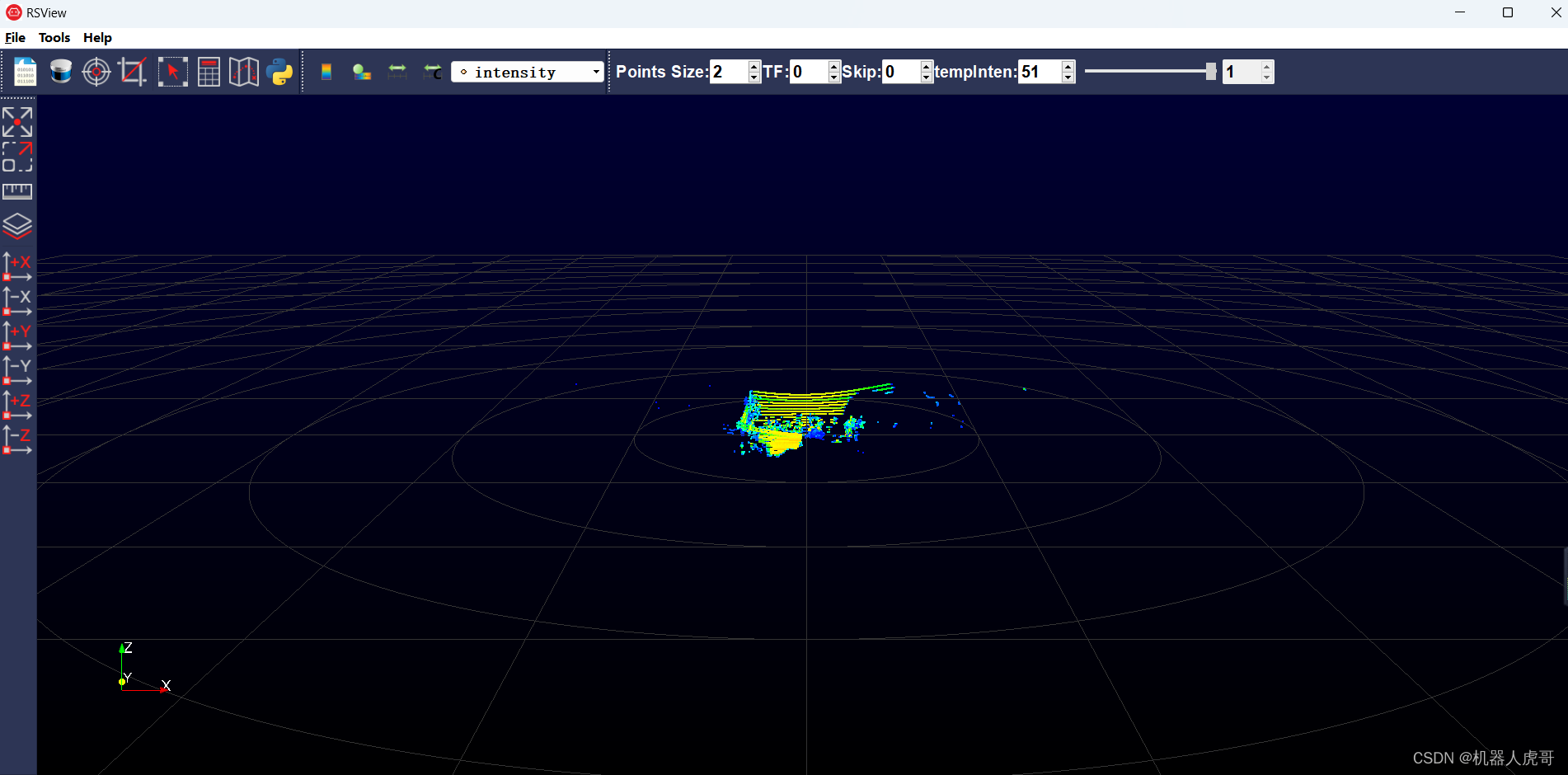
就可以拖动看到点云数据了。
2.5 RS_View 修改雷达网络参数
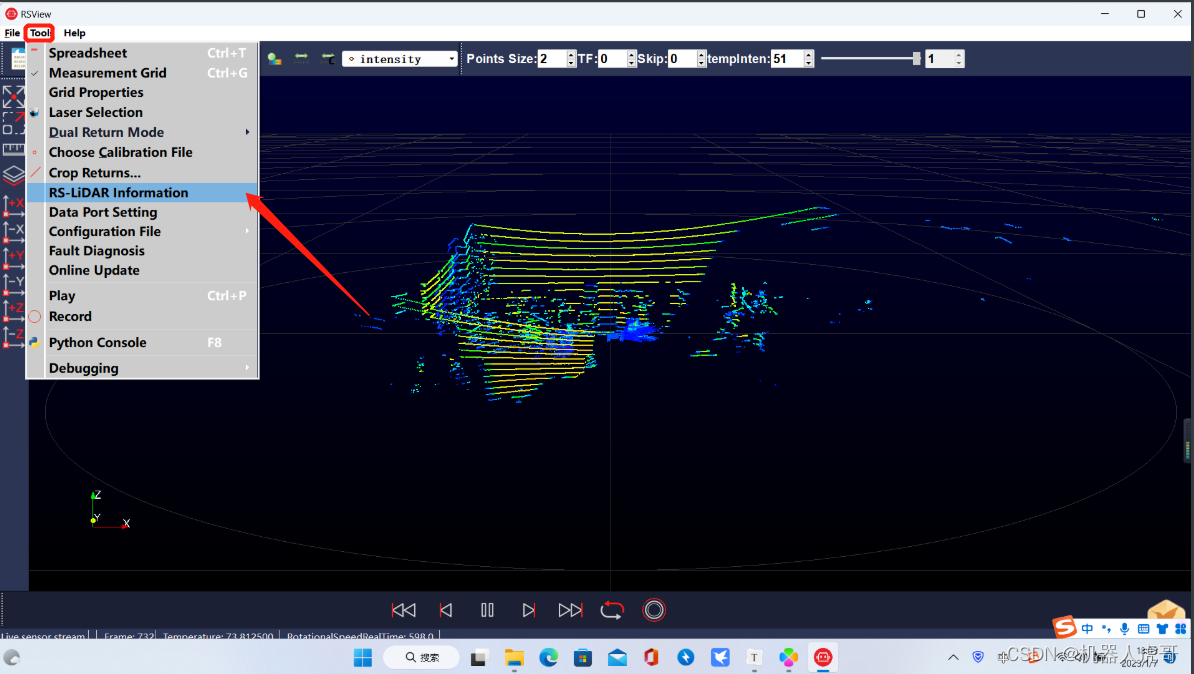
 先获取参数:
先获取参数:

根据需要改变后,在设置:

 等待。
等待。

由于改了IP,此时已经改了,所以需要你对应修改你自己的电脑IP后,再链接。雷达记得重新上电一下。

在打开链接。

三、ROS下查看点云
上面WIN端,我们修改了IP信息,这里将雷达网口和测试主板链接到一起。将主板IP改成雷达要求的192.168.1.102


3.1 建立工作空间
mkdir -p ~/RS_lidar_ws/src
cd ~/RS_lidar_ws/
catkin_make
source devel/setup.bash3.2 克隆代码
cd ~/RS_lidar_ws/src
#将官网地址的代码包放置到这个目录解压
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
sudo apt-get install -y libpcap-dev3.3 编译源码包(Compile with ROS catkin tools)
cd ~/RS_lidar_ws/src/rslidar_sdk
1、在 rslidar_sdk 包内 CMakeLists.txt ,设置变量 COMPILE_METHOD 为 CATKIN.
vim CMakeLists.txt
2、 在rslidar_sdk目录下复制 package_ros1.xml 为 package.xml
cp package_ros1.xml package.xml
3、 编译工程
cd ~/RS_lidar_ws
catkin_make
source devel/setup.bash
编译完成。
3.4 将板子IP修改到和雷达同一个网段
我是将雷达直接连到板子网口的,所以对应网口IP我需要设置一个固定IP。将主板IP改成雷达要求的192.168.1.102,雷达IP已经被我们恢复默认的192.168.1.200

3.4 配置启动参数
cd ~/RS_lidar_ws/src/rslidar_sdk/config
vim config.yaml
#根据对应类型型号参数修改。 RS-LiDAR-16 测距能力:150m 盲区:<=0.4m 角度分辨率:0.1°/0.2°/0.4°

3.4 启动驱动
cd ~/RS_lidar_ws
source devel/setup.bash
#启动驱动 需要显示器支持,我实在nomachine端打开
roslaunch rslidar_sdk start.launch
 会自动打开RVIZ,显示点云。
会自动打开RVIZ,显示点云。

新启动一个终端,我们可以初步看看驱动的一些节点信息:
rosnode list
/rosout
/rslidar_sdk_node
/rviz
rostopic list
/clicked_point
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/rslidar_points
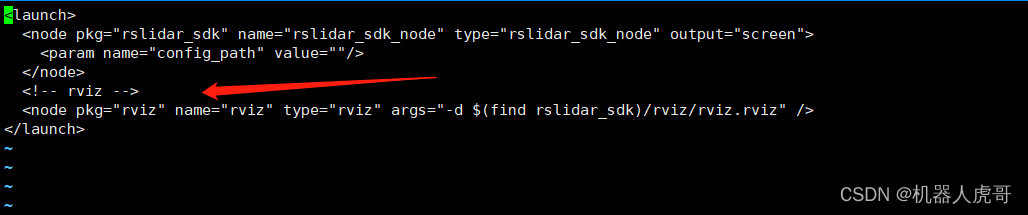
/tf
/tf_static如果后续你自己不需要打开RVIZ,只需要在启动脚本中,将RVIZ打开的内容注释掉即可。
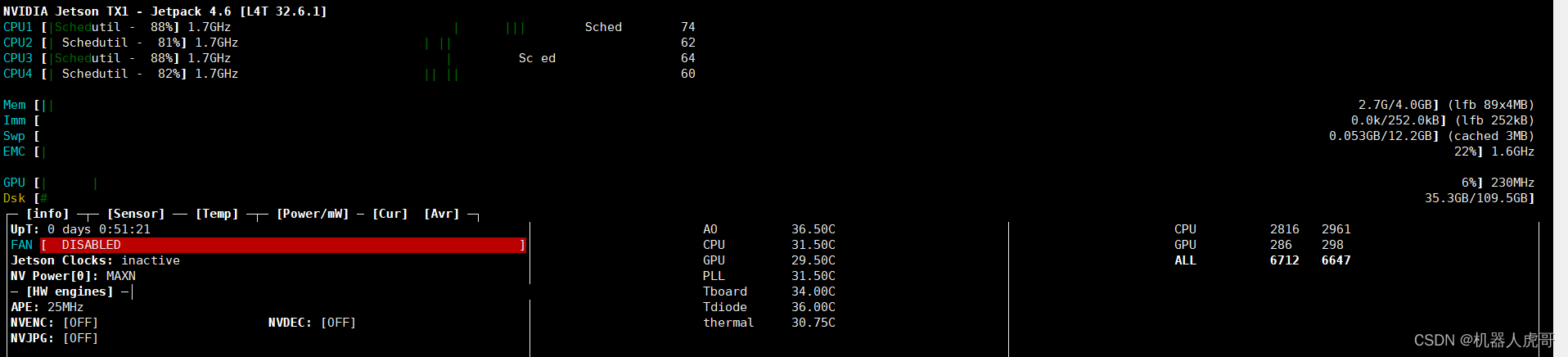
我们在打开雷达的点云同时,也记录一下CPU资源占用:
纠错,疑问,交流: 911946883@qq.com


![[实例讲解]计算机处理任务的方法和原理--线程](https://img-blog.csdnimg.cn/0cfb717a669d4d5bbfec093c7865166e.png#pic_center)