AXI4 相对复杂,但 SOC 开发者必须掌握。AXI 协议的具体内容可参考 Xilinx UG761 AXI Reference Guide。
在这里我们简单了解一下。
AXI4 所采用的是一种 READY,VALID 握手通信机制,即主从模块进行数据通信前,先根
据操作对各所用到的数据、地址通道进行握手。主要操作包括传输发送者 A 等到传输接受者 B
的 READY 信号后,A 将数据与 VALID 信号同时发送给 B,这是一种典型的握手机制。

AXI 总线分为五个通道:
读地址通道,包含 ARVALID, ARADDR, ARREADY 信号;
写地址通道,包含 AWVALID,AWADDR, AWREADY 信号;
读数据通道,包含 RVALID, RDATA, RREADY, RRESP 信号;
写数据通道,包含 WVALID, WDATA,WSTRB, WREADY 信号;
写应答通道,包含 BVALID, BRESP, BREADY 信号;
系统通道,包含:ACLK,ARESETN 信号;
其中 ACLK 为 axi 总线时钟,ARESETN 是 axi 总线复位信号,低电平有效;读写数据与读
写地址类信号宽度都为 32bit;READY 与 VALID 是对应的通道握手信号;WSTRB 信号为 1 的
bit 对应 WDATA 有效数据字节,WSTRB 宽度是 32bit/8=4bit;BRESP 与 RRESP 分别为写回
应信号,读回应信号,宽度都为 2bit,‘h0 代表成功,其他为错误。
读操作顺序为主与从进行读地址通道握手并传输地址内容,然后在读数据通道握手并传输
所读内容以及读取操作的回应,时钟上升沿有效。如图所示:

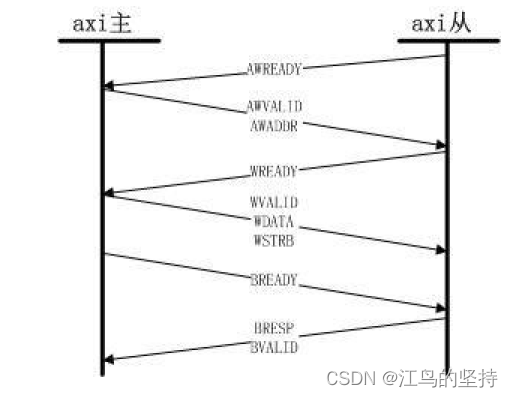
写操作顺序为主与从进行写地址通道握手并传输地址内容,然后在写数据通道握手并传输
所读内容,最后再写回应通道握手,并传输写回应数据,时钟上升沿有效。如图所示:
在我们不擅长写 FPGA 的一些代码时我们往往要借鉴别人的代码或者使用 IP core。在这里
笔者从 github 上找到一个 AXI master 的代码,地址是
https://github.com/aquaxis/IPCORE/tree/master/aq_axi_vdma。这个工程是一个自己写的
VDMA,里面包含了大量可参考的代码。笔者这里主要使用了 aq_axi_master.v 这个代码用于
AXI master 读写操作。借鉴别人代码有时会节省很多时间,但如果不能理解的去借鉴,出现问
题了很难解决。aq_axi_master.v 代码如下,有部分修改。
/*
* Copyright (C)2014-2015 AQUAXIS TECHNOLOGY.
* Don't remove this header.
* When you use this source, there is a need to inherit this header.
*
* License
* For no commercial -
* License: The Open Software License 3.0
* License URI: http://www.opensource.org/licenses/OSL-3.0
*
* For commmercial -
* License: AQUAXIS License 1.0
* License URI: http://www.aquaxis.com/licenses
*
* For further information please contact.
* URI: http://www.aquaxis.com/
* E-Mail: info(at)aquaxis.com
*/
//
// Company:
// Engineer:
//
// Create Date: 2016/11/17 10:27:06
// Design Name:
// Module Name: mem_test
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//
module aq_axi_master(
// Reset, Clock
input ARESETN,
input ACLK,
// Master Write Address
output[0:0] M_AXI_AWID,
output[31:0] M_AXI_AWADDR,
output[7:0] M_AXI_AWLEN,// Burst Length: 0-255
output[2:0] M_AXI_AWSIZE,// Burst Size: Fixed 2'b011
output[1:0] M_AXI_AWBURST,// Burst Type: Fixed 2'b01(Incremental Burst)
output M_AXI_AWLOCK,// Lock: Fixed 2'b00
output[3:0] M_AXI_AWCACHE,// Cache: Fiex 2'b0011
output[2:0] M_AXI_AWPROT,// Protect: Fixed 2'b000
output[3:0] M_AXI_AWQOS,// QoS: Fixed 2'b0000
output[0:0] M_AXI_AWUSER,// User: Fixed 32'd0
output M_AXI_AWVALID,
input M_AXI_AWREADY,
// Master Write Data
output[63:0] M_AXI_WDATA,
output[7:0] M_AXI_WSTRB,
output M_AXI_WLAST,
output[0:0] M_AXI_WUSER,
output M_AXI_WVALID,
input M_AXI_WREADY,
// Master Write Response
input[0:0] M_AXI_BID,
input[1:0] M_AXI_BRESP,
input[0:0] M_AXI_BUSER,
input M_AXI_BVALID,
output M_AXI_BREADY,
// Master Read Address
output[0:0] M_AXI_ARID,
output[31:0] M_AXI_ARADDR,
output[7:0] M_AXI_ARLEN,
output[2:0] M_AXI_ARSIZE,
output[1:0] M_AXI_ARBURST,
output[1:0] M_AXI_ARLOCK,
output[3:0] M_AXI_ARCACHE,
output[2:0] M_AXI_ARPROT,
output[3:0] M_AXI_ARQOS,
output[0:0] M_AXI_ARUSER,
output M_AXI_ARVALID,
input M_AXI_ARREADY,
// Master Read Data
input[0:0] M_AXI_RID,
input[63:0] M_AXI_RDATA,
input[1:0] M_AXI_RRESP,
input M_AXI_RLAST,
input[0:0] M_AXI_RUSER,
input M_AXI_RVALID,
output M_AXI_RREADY,
// Local Bus
input MASTER_RST,
input WR_START,
input[31:0] WR_ADRS,
input[31:0] WR_LEN,
output WR_READY,
output WR_FIFO_RE,
input WR_FIFO_EMPTY,
input WR_FIFO_AEMPTY,
input[63:0] WR_FIFO_DATA,
output WR_DONE,
input RD_START,
input[31:0] RD_ADRS,
input[31:0] RD_LEN,
output RD_READY,
output RD_FIFO_WE,
input RD_FIFO_FULL,
input RD_FIFO_AFULL,
output[63:0] RD_FIFO_DATA,
output RD_DONE,
output[31:0] DEBUG
);
localparam S_WR_IDLE =3'd0;
localparam S_WA_WAIT =3'd1;
localparam S_WA_START =3'd2;
localparam S_WD_WAIT =3'd3;
localparam S_WD_PROC =3'd4;
localparam S_WR_WAIT =3'd5;
localparam S_WR_DONE =3'd6;
reg[2:0] wr_state;
reg[31:0] reg_wr_adrs;
reg[31:0] reg_wr_len;
reg reg_awvalid, reg_wvalid, reg_w_last;
reg[7:0] reg_w_len;
reg[7:0] reg_w_stb;
reg[1:0] reg_wr_status;
reg[3:0] reg_w_count, reg_r_count;
reg[7:0] rd_chkdata, wr_chkdata;
reg[1:0] resp;
reg rd_first_data;
reg rd_fifo_enable;
reg[31:0] rd_fifo_cnt;
assign WR_DONE =(wr_state == S_WR_DONE);
assign WR_FIFO_RE = rd_first_data |(reg_wvalid &~WR_FIFO_EMPTY &
M_AXI_WREADY & rd_fifo_enable);
//assign WR_FIFO_RE = reg_wvalid & ~WR_FIFO_EMPTY & M_AXI_WREADY;
always@(posedge ACLK ornegedge ARESETN)
begin
if(!ARESETN)
rd_fifo_cnt <=32'd0;
elseif(WR_FIFO_RE)
rd_fifo_cnt <= rd_fifo_cnt +32'd1;
elseif(wr_state == S_WR_IDLE)
rd_fifo_cnt <=32'd0;
end
always@(posedge ACLK ornegedge ARESETN)
begin
if(!ARESETN)
rd_fifo_enable <=1'b0;
elseif(wr_state == S_WR_IDLE && WR_START)
rd_fifo_enable <=1'b1;
elseif(WR_FIFO_RE &&(rd_fifo_cnt == RD_LEN[31:3]-32'd1))
rd_fifo_enable <=1'b0;
end
// Write State
always@(posedge ACLK ornegedge ARESETN)begin
if(!ARESETN)begin
wr_state <= S_WR_IDLE;
reg_wr_adrs[31:0]<=32'd0;
reg_wr_len[31:0]<=32'd0;
reg_awvalid <=1'b0;
reg_wvalid <=1'b0;
reg_w_last <=1'b0;
reg_w_len[7:0]<=8'd0;
reg_w_stb[7:0]<=8'd0;
reg_wr_status[1:0]<=2'd0;
reg_w_count[3:0]<=4'd0;
reg_r_count[3:0]<=4'd0;
wr_chkdata <=8'd0;
rd_chkdata <=8'd0;
resp <=2'd0;
rd_first_data <=1'b0;
endelsebegin
if(MASTER_RST)begin
wr_state <= S_WR_IDLE;
endelsebegin
case(wr_state)
S_WR_IDLE:begin
if(WR_START)begin
wr_state <= S_WA_WAIT;
reg_wr_adrs[31:0]<= WR_ADRS[31:0];
reg_wr_len[31:0]<= WR_LEN[31:0]-32'd1;
rd_first_data <=1'b1;
end
reg_awvalid <=1'b0;
reg_wvalid <=1'b0;
reg_w_last <=1'b0;
reg_w_len[7:0]<=8'd0;
reg_w_stb[7:0]<=8'd0;
reg_wr_status[1:0]<=2'd0;
end
S_WA_WAIT:begin
if(!WR_FIFO_AEMPTY |(reg_wr_len[31:11]==21'd0))begin
wr_state <= S_WA_START;
end
rd_first_data <=1'b0;
end
S_WA_START:begin
wr_state <= S_WD_WAIT;
reg_awvalid <=1'b1;
reg_wr_len[31:11]<= reg_wr_len[31:11]-21'd1;
if(reg_wr_len[31:11]!=21'd0)begin
reg_w_len[7:0]<=8'hFF;
reg_w_last <=1'b0;
reg_w_stb[7:0]<=8'hFF;
endelsebegin
reg_w_len[7:0]<= reg_wr_len[10:3];
reg_w_last <=1'b1;
reg_w_stb[7:0]<=8'hFF;
/*
case(reg_wr_len[2:0]) begin
case 3'd0: reg_w_stb[7:0] <= 8'b0000_0000;
case 3'd1: reg_w_stb[7:0] <= 8'b0000_0001;
case 3'd2: reg_w_stb[7:0] <= 8'b0000_0011;
case 3'd3: reg_w_stb[7:0] <= 8'b0000_0111;
case 3'd4: reg_w_stb[7:0] <= 8'b0000_1111;
case 3'd5: reg_w_stb[7:0] <= 8'b0001_1111;
case 3'd6: reg_w_stb[7:0] <= 8'b0011_1111;
case 3'd7: reg_w_stb[7:0] <= 8'b0111_1111;
default: reg_w_stb[7:0] <= 8'b1111_1111;
endcase
*/
end
end
S_WD_WAIT:begin
if(M_AXI_AWREADY)begin
wr_state <= S_WD_PROC;
reg_awvalid <=1'b0;
reg_wvalid <=1'b1;
end
end
S_WD_PROC:begin
if(M_AXI_WREADY &~WR_FIFO_EMPTY)begin
if(reg_w_len[7:0]==8'd0)begin
wr_state <= S_WR_WAIT;
reg_wvalid <=1'b0;
reg_w_stb[7:0]<=8'h00;
endelsebegin
reg_w_len[7:0]<= reg_w_len[7:0]-8'd1;
end
end
end
S_WR_WAIT:begin
if(M_AXI_BVALID)begin
reg_wr_status[1:0]<= reg_wr_status[1:0]| M_AXI_BRESP[1:0];
if(reg_w_last)begin
wr_state <= S_WR_DONE;
endelsebegin
wr_state <= S_WA_WAIT;
reg_wr_adrs[31:0]<= reg_wr_adrs[31:0]+32'd2048;
end
end
end
S_WR_DONE:begin
wr_state <= S_WR_IDLE;
end
default:begin
wr_state <= S_WR_IDLE;
end
endcase
/*
if(WR_FIFO_RE) begin
reg_w_count[3:0] <= reg_w_count[3:0] + 4'd1;
end
if(RD_FIFO_WE)begin
reg_r_count[3:0] <= reg_r_count[3:0] + 4'd1;
end
if(M_AXI_AWREADY & M_AXI_AWVALID) begin
wr_chkdata <= 8'hEE;
end else if(M_AXI_WSTRB[7] & M_AXI_WVALID) begin
wr_chkdata <= WR_FIFO_DATA[63:56];
end
if(M_AXI_AWREADY & M_AXI_AWVALID) begin
rd_chkdata <= 8'hDD;
end else if(M_AXI_WSTRB[7] & M_AXI_WREADY) begin
rd_chkdata <= WR_FIFO_DATA[63:56];
end
if(M_AXI_BVALID & M_AXI_BREADY) begin
resp <= M_AXI_BRESP;
end
*/
end
end
end
assign M_AXI_AWID =1'b0;
assign M_AXI_AWADDR[31:0]= reg_wr_adrs[31:0];
assign M_AXI_AWLEN[7:0]= reg_w_len[7:0];
assign M_AXI_AWSIZE[2:0]=2'b011;
assign M_AXI_AWBURST[1:0]=2'b01;
assign M_AXI_AWLOCK =1'b0;
assign M_AXI_AWCACHE[3:0]=4'b0011;
assign M_AXI_AWPROT[2:0]=3'b000;
assign M_AXI_AWQOS[3:0]=4'b0000;
assign M_AXI_AWUSER[0]=1'b1;
assign M_AXI_AWVALID = reg_awvalid;
assign M_AXI_WDATA[63:0]= WR_FIFO_DATA[63:0];
// assign M_AXI_WSTRB[7:0] = (reg_w_len[7:0] ==
8'd0)?reg_w_stb[7:0]:8'hFF;
// assign M_AXI_WSTRB[7:0] = (wr_state == S_WD_PROC)?8'hFF:8'h00;
assign M_AXI_WSTRB[7:0]=(reg_wvalid &~WR_FIFO_EMPTY)?8'hFF:8'h00;
assign M_AXI_WLAST =(reg_w_len[7:0]==8'd0)?1'b1:1'b0;
assign M_AXI_WUSER =1;
assign M_AXI_WVALID = reg_wvalid &~WR_FIFO_EMPTY;
// assign M_AXI_WVALID = (wr_state == S_WD_PROC)?1'b1:1'b0;
assign M_AXI_BREADY = M_AXI_BVALID;
assign WR_READY =(wr_state == S_WR_IDLE)?1'b1:1'b0;
// assign WR_FIFO_RE = (wr_state == S_WD_PROC)?M_AXI_WREADY:1'b0;
localparam S_RD_IDLE =3'd0;
localparam S_RA_WAIT =3'd1;
localparam S_RA_START =3'd2;
localparam S_RD_WAIT =3'd3;
localparam S_RD_PROC =3'd4;
localparam S_RD_DONE =3'd5;
reg[2:0] rd_state;
reg[31:0] reg_rd_adrs;
reg[31:0] reg_rd_len;
reg reg_arvalid, reg_r_last;
reg[7:0] reg_r_len;
assign RD_DONE =(rd_state == S_RD_DONE);
// Read State
always@(posedge ACLK ornegedge ARESETN)begin
if(!ARESETN)begin
rd_state <= S_RD_IDLE;
reg_rd_adrs[31:0]<=32'd0;
reg_rd_len[31:0]<=32'd0;
reg_arvalid <=1'b0;
reg_r_len[7:0]<=8'd0;
endelsebegin
case(rd_state)
S_RD_IDLE:begin
if(RD_START)begin
rd_state <= S_RA_WAIT;
reg_rd_adrs[31:0]<= RD_ADRS[31:0];
reg_rd_len[31:0]<= RD_LEN[31:0]-32'd1;
end
reg_arvalid <=1'b0;
reg_r_len[7:0]<=8'd0;
end
S_RA_WAIT:begin
if(~RD_FIFO_AFULL)begin
rd_state <= S_RA_START;
end
end
S_RA_START:begin
rd_state <= S_RD_WAIT;
reg_arvalid <=1'b1;
reg_rd_len[31:11]<= reg_rd_len[31:11]-21'd1;
if(reg_rd_len[31:11]!=21'd0)begin
reg_r_last <=1'b0;
reg_r_len[7:0]<=8'd255;
endelsebegin
reg_r_last <=1'b1;
reg_r_len[7:0]<= reg_rd_len[10:3];
end
end
S_RD_WAIT:begin
if(M_AXI_ARREADY)begin
rd_state <= S_RD_PROC;
reg_arvalid <=1'b0;
end
end
S_RD_PROC:begin
if(M_AXI_RVALID)begin
if(M_AXI_RLAST)begin
if(reg_r_last)begin
rd_state <= S_RD_DONE;
endelsebegin
rd_state <= S_RA_WAIT;
reg_rd_adrs[31:0]<= reg_rd_adrs[31:0]+32'd2048;
end
endelsebegin
reg_r_len[7:0]<= reg_r_len[7:0]-8'd1;
end
end
end
S_RD_DONE:begin
rd_state <= S_RD_IDLE;
end
endcase
end
end
// Master Read Address
assign M_AXI_ARID =1'b0;
assign M_AXI_ARADDR[31:0]= reg_rd_adrs[31:0];
assign M_AXI_ARLEN[7:0]= reg_r_len[7:0];
assign M_AXI_ARSIZE[2:0]=3'b011;
assign M_AXI_ARBURST[1:0]=2'b01;
assign M_AXI_ARLOCK =1'b0;
assign M_AXI_ARCACHE[3:0]=4'b0011;
assign M_AXI_ARPROT[2:0]=3'b000;
assign M_AXI_ARQOS[3:0]=4'b0000;
assign M_AXI_ARUSER[0]=1'b1;
assign M_AXI_ARVALID = reg_arvalid;
assign M_AXI_RREADY = M_AXI_RVALID &~RD_FIFO_FULL;
assign RD_READY =(rd_state == S_RD_IDLE)?1'b1:1'b0;
assign RD_FIFO_WE = M_AXI_RVALID;
assign RD_FIFO_DATA[63:0]= M_AXI_RDATA[63:0];
assign DEBUG[31:0]={reg_wr_len[31:8],
1'd0, wr_state[2:0],1'd0, rd_state[2:0]};
endmodule