🌈个人主页:Sarapines Programmer
🔥 系列专栏:《机组 | 模块单元实验》
⏰诗赋清音:云生高巅梦远游, 星光点缀碧海愁。 山川深邃情难晤, 剑气凌云志自修。


目录
1. 综合实验的调试
1.1 实验目的
1.2 实验连线
1.3 指令系统
1.4 微指令表
1.5 程序调试
实验一:实现普通的加、减法指令
实验二:带进位运算的模型机
实验三:数据传送实验
实验四:移位实验
实验五:转移实验
2. 驻机键盘和液晶显示器的使用方式
2.1 键盘定义
2.2 操作方法
2.2.1 读/写控存微指令(保存在6264)
2.2.2 读/写内存单元指令或数据(保存在6264)
2.2.3 控存块微代码信息与flash memory数据交换操作
2.2.4 从flash memory读回控存块
2.2.5 控存块数据写入flash memory
2.2.6 从flash memory读回到内存RAM块
2.2.7 内存块保存到flash memory中
2.2.8 微单步运行程序
2.2.9 连续运行程序
2.2.10 寄存器显示
📝总结
1. 综合实验的调试
1.1 实验目的
1、通过使用调试软件,了解程序编译、加载的过程。
2、通过微单步、单拍调试,理解模型机中的数据流向。
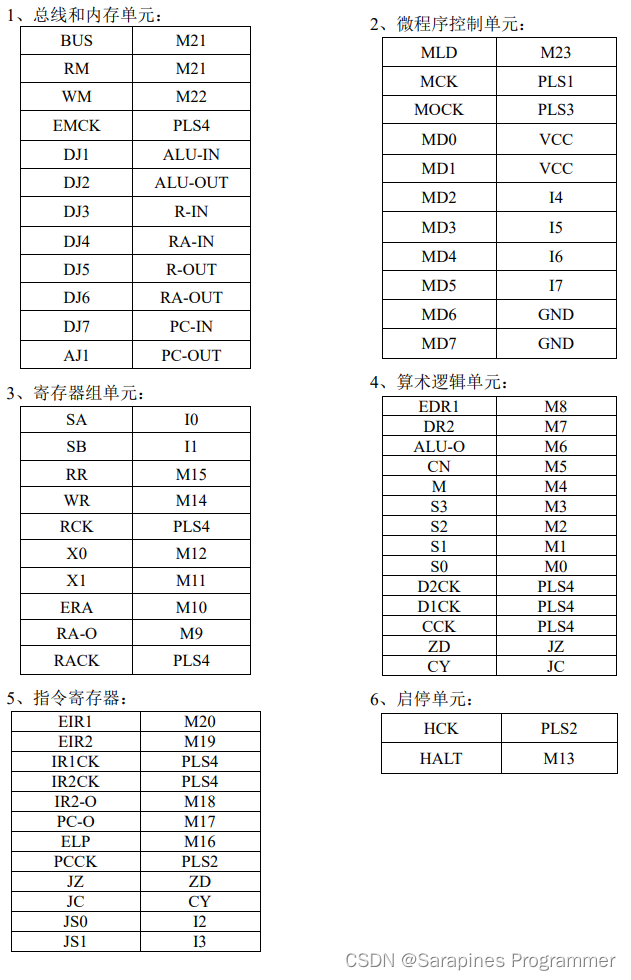
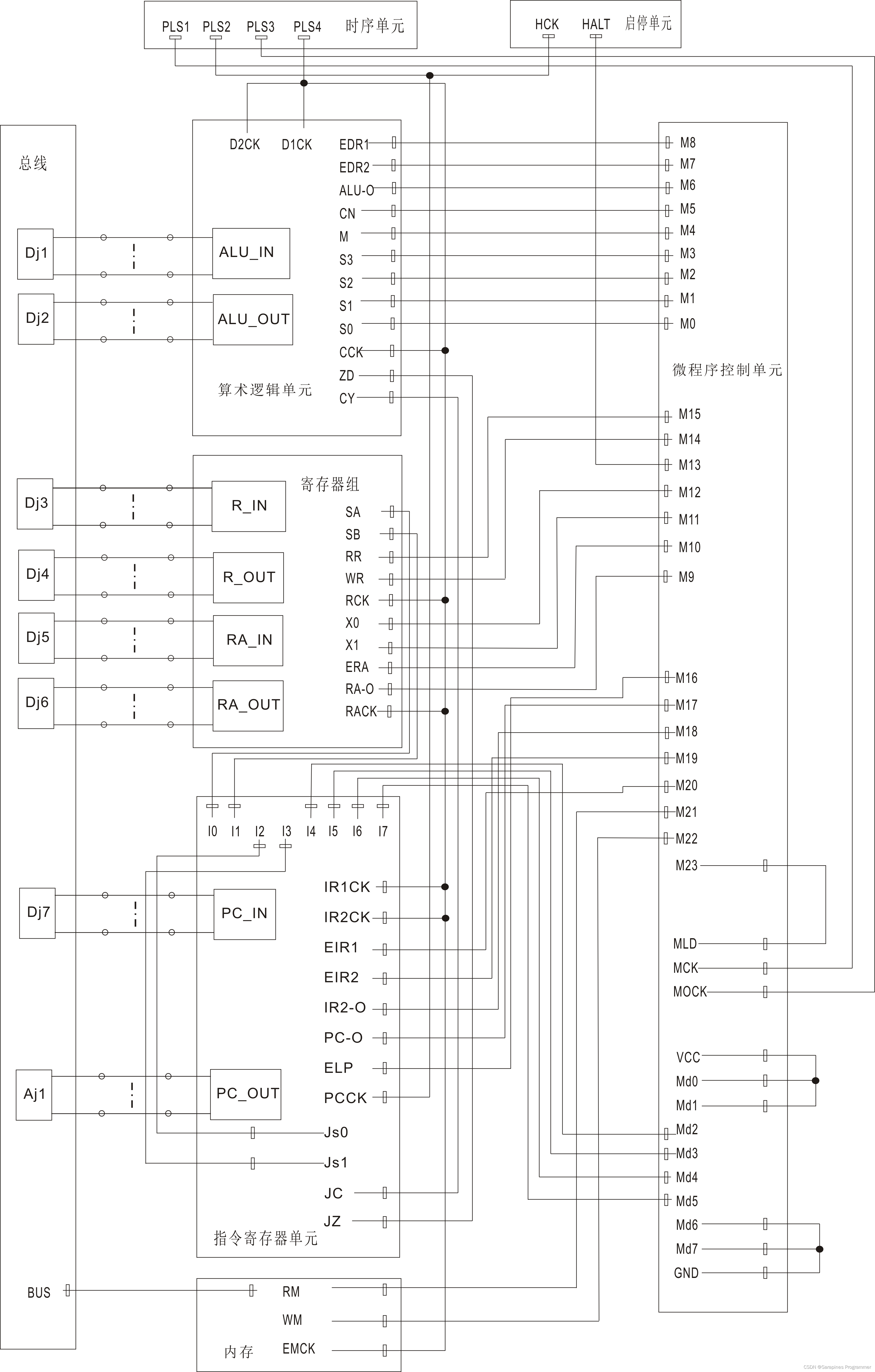
1.2 实验连线
各模块控制信号连接表:(或者使用提供的连线板)
1.3 指令系统
| 指令助记符 | 指令功能 | 指令编码 | 微周期 | 微操作 |
| 取指微指令 | T0: | PC->地址总线->RAM RAM->数据总线->IR1 | ||
| ADD A,R0 ADD A,R1 ADD A,R2 ADD A,R3 | (A)+(Ri)->A | 0C 0D 0E 0F | T0: T1: T2: T3: | A->数据总线->DR1 Ri->数据总线->DR2 ALU->数据总线->A、置CY 取指微指令 |
| SUB A,R0 SUB A,R1 SUB A,R2 SUB A,R3 | (A)-(Ri)->A | 1C 1D 1E 1F | T0: T1: T2: T3: | A->数据总线->DR1 Ri->数据总线->DR2 ALU->数据总线->A、置CY 取指微指令 |
| MOV A,@R0 MOV A,@R1 MOV A,@R2 MOV A,@R3 | (Ri)->A | 2C 2D 2E 2F | T0: T1: T2: | Ri->数据总线->IR2 IR2->地址总线->RAM->A 取指微指令 |
| MOV A,R0 MOV A,R1 MOV A,R2 MOV A,R3 | (Ri)->A | 3C 3D 3E 3F | T0: T1: | Ri->数据总线->A 取指微指令 |
| MOV R0,A MOV R1,A MOV R2,A MOV R3,A | (A)->Ri | 4C 4D 4E 4F | T0: T1: | A->数据总线->Ri 取指微指令 |
| MOV A,#data | Data->A | 5F | T0: T1: | RAM->数据总线->A 取指微指令 |
| MOV R0,#data MOV R1,#data MOV R2,#data MOV R3,#data | Data->Ri | 6C 6D 6E 6F | T0: T1: | RAM->数据总线->A 取指微指令 |
| LDA addr | (addr)->A | 7F | T0: T1: T2: | RAM->数据总线->IR2 IR2->地址总线,RAM->A 取指微指令 |
| STA addr | (A)->addr | 8F | T0: T1: T2: | RAM->数据总线->IR2 IR2->地址总线,A->RAM 取指微指令 |
| RLC A | C、A左移1位 | AF | T0: T1: | A<<1、置CY 取指微指令 |
| RRC A | C、A右移1位 | 9F | T0: T1: | A>>1、置CY 取指微指令 |
| JZ addr | A=0 ,Addr->PC | B3 | T0: T1: | 条件成立:RAM->PC 取指微指令 |
| JC addr | Cy=0,Addr->PC | B7 | T0: T1: | 条件成立:RAM->PC 取指微指令 |
| JMP addr | Addr->PC | BF | T0: T1: | RAM->PC 取指微指令 |
| ORL A,#data | (A)或data->A | CF | T0: T1: T2: T3: | A->数据总线->DR1 RAM->数据总线->DR2 ALU->数据总线->A 取指微指令 |
| ANL A,#data | (A) 与data->A | DF | T0: T1: T2: T3: | A->数据总线->DR1 RAM->数据总线->DR2 ALU->数据总线->A 取指微指令 |
| HALT | 停机 | FF | T0: | 停机 |
1.4 微指令表
| 指令助记符 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
| 微地址 | MLD | WM | RM | EIR1 | EIR2 | IR2-O | PC-O | ELP | RR | WR | HALT | X0 | X1 | ERA | RA-O | EDR1 | EDR2 | ALU-O | CN | M | S3 | S2 | S1 | S0 | 16进制 | |
| 有效值 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | * | * | 0 | 0 | 0 | 0 | 0 | * | * | * | * | * | * | ||
| 00H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 取指微指令 | 01H | |||||||||||||||||||||||||
| 02H | ||||||||||||||||||||||||||
| ADD A,RI | 03H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | FFFCF9 |
|
| 04H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | FF7F79 |
|
| 05H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | FFFBA9 |
|
| 06H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
| SUB A,RI | 07H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | FFFCD6 |
|
| 08H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | FF7F56 |
|
| 09H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | FFFB86 |
|
| 0AH | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
| MOV A,@RI | 0BH | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | F77FFF |
|
| 0CH | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | DBFBFF |
|
| 0DH | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
|
| 0EH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MOV A,RI | 0FH | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | FF7BFF |
|
| 10H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
|
| 11H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 12H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| MOV RI,A | 13H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | FFBDFF |
|
| 14H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
|
| 15H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 16H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 指令助记符 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
| 微地址 | MLD | WM | RM | EIR1 | EIR2 | IR2-O | PC-O | ELP | RR | WR | HALT | X0 | X1 | ERA | RA-O | EDR1 | EDR2 | ALU-O | CN | M | S3 | S2 | S1 | S0 | 16进制 | |
| 有效值 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | * | * | 0 | 0 | 0 | 0 | 0 | * | * | * | * | * | * | ||
| MOV A,#data | 17H | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | DDFBFF |
| 18H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 19H | ||||||||||||||||||||||||||
| 1AH | ||||||||||||||||||||||||||
| MOV Ri,#data | 1BH | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | DDBFFF |
| 1CH | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 1DH | ||||||||||||||||||||||||||
| 1EH | ||||||||||||||||||||||||||
| LDA A,addr | 1FH | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | D5FFFF |
| 20H | 1 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | DBFBFF | |
| 21H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 22H | ||||||||||||||||||||||||||
| STA addr | 23H | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | D5FFFF |
| 24H | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | BBFDFF | |
| 25H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 26H | ||||||||||||||||||||||||||
| RRC | 27H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | FFF1EF |
|
| 28H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
|
| 29H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2AH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| RLC | 2BH | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | FFE9EF |
|
| 2CH | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
|
| 2DH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2EH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 指令助记符 | 23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | ||
| 微地址 | MLD | WM | RM | EIR1 | EIR2 | IR2-O | PC-O | ELP | RR | WR | HALT | X0 | X1 | ERA | RA-O | EDR1 | EDR2 | ALU-O | CN | M | S3 | S2 | S1 | S0 | 16进制 | |
| 有效值 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | * | * | 0 | 0 | 0 | 0 | 0 | * | * | * | * | * | * | ||
| JZ addr | 2FH | 1 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | D4FFFF |
| JC addr | 30H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF |
| JMP addr | 31H | |||||||||||||||||||||||||
| 32H | ||||||||||||||||||||||||||
| ORL A,#data | 33H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | FFFCFE |
| 34H | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | DDFF7E | |
| 35H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | FFFBBE | |
| 36H | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| ANL A,#data | 37H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | FFFCFB |
| 38H | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | DDFF7B | |
| 39H | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 0 | 1 | 1 | FFFBBB | |
| 3AH | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 4DFFFF | |
| 3BH | ||||||||||||||||||||||||||
| 3CH | ||||||||||||||||||||||||||
| 3DH | ||||||||||||||||||||||||||
| 3EH | ||||||||||||||||||||||||||
| HALT | 3FH | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | FFDFFF |
1.5 程序调试
(实验程序要使用16进制的数字后必须带H,不然程序会默认是10进制的)
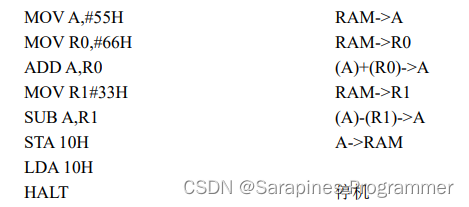
实验一:实现普通的加、减法指令
在软件HKCPT中,输入以下程序,并且编译、加载到实验平台中。
或通过键盘(键盘使用方法见第四章)输入微程序及以下程序:
| 内存地址 | 指令助记符 | 指令码或立即数 | 说明 |
| 00H | MOV A,#55 | 5FH | 立即数55H->A |
| 01H | 55H | ||
| 02H | MOV R0,#66 | 6CH | 立即数66H->寄存器R0 |
| 03H | 66H | ||
| 04H | ADD A,R0 | 0CH | A内容+R0内容->A |
| 05H | MOV R1,#33 | 6DH | 立即数33H->寄存器R1 |
| 06H | 33H | ||
| 07H | SUB A,R1 | 1DH | A内容-R1内容->A |
| 08H | STA 10 | 8FH | 将A内容写入RAM地址10H |
| 09H | 10H | ||
| 0AH | HALT | FFH | 停机 |
运行结果为:RAM 10H单元中的内容为88H
运行程序:通过软件HKCPT的微单步功能可观察各个变量的变化。
微单步运行过程显示如下:
| 微地址 | 数据流程 | 数据总线 | 地址总线 | 操作寄存器 |
| 00H | 取指微指令 RAM->BUS->IR1 | 5FH | 00H | IR1=5FH |
| MOV A,#55 | ||||
| 17H | BUS-> A | 55H | 01H | A=55H |
| 18H | 取指微指令 RAM->BUS->IR1 | 6CH | 02H | IR1=6CH |
| MOV R0,#66 | ||||
| 1BH | RAM->寄存器R0 | 66H | 03H | 寄存器R0=66H |
| 1CH | 取指微指令 RAM->BUS->IR1 | 0CH | 04H | IR1=0CH |
| ADD A,R0 | ||||
| 03H | A->锁存器DR1 | 55H | 无效 | DR1=55H |
| 04H | 寄存器R0->锁存器DR2 | 66H | 无效 | DR2=66H |
| 05H | ALU-> A | BBH | 无效 | A=BBH |
| 06H | 取指微指令 RAM->BUS->IR1 | 6DH | 05H | IR1=6DH |
| MOV R1,#33 | ||||
| 1BH | RAM->寄存器R1 | 33H | 06H | 寄存器R1=33 |
| 1CH | 取指微指令 RAM->BUS->IR1 | 1DH | 07H | IR1=1DH |
| SUB A,R1 | ||||
| 07H | A->锁存器DR1 | BBH | 无效 | DR1=BBH |
| 08H | 寄存器R1->锁存器DR2 | 33H | 无效 | DR2=33H |
| 09H | ALU->A | 88H | 无效 | A=88H |
| 0AH | 取指微指令 RAM->BUS->IR1 | 8FH | 08H | IR1=8FH |
| STA 10 | ||||
| 23H | RAM->BUS->IR2 | 10H | 09H | IR2=10H |
| 24H | A->RAM(10H) | 88H | 10H | RAM(10)=88H |
| 25H | 取指微指令 RAM->BUS->IR1 | 7FH | 0AH | IR1=7FH |
| 1FH | 10H | 0BH | ||
| 20H | 88H | 10H | ||
| 21H | FFH | 0CH | IR1=FFH | |
| HALT | ||||
| 3FH | 置模型机为停止状态 | 无效 | 无效 | 置停止状态 |
如果在运行微单步时,发现有错误或对微单步中的时序过程不清楚,可用时序单元中的按钮来手动给出4个节拍。
| 微周期 | 数据流程 | 节拍 | 数据总线 | 地址总线 | 操作寄存器 |
| T0: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址清零 PLS2:置模型机运行 PLS3:取指微指令输出 PLS4:BUS->IR1 | 无效 无效 5FH 5FH | 无效 无效 00H 00H | 微地址:00H PC=00H 锁存微指令 IR=5FH |
| MOV A,#55 | |||||
| T0: | BUS->A | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 5FH 5FH 55H 55H | 00H 00H 01H 01H | 微地址:17H PC=01H 锁存微指令 A=55H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->IR1 | 55H 55H 6CH 6CH | 01H 01H 02H 02H | 微地址:18H PC=02H 锁存微指令 IR1=6CH |
| MOV R0,#66 | |||||
| T0: | RAM->寄存器R0 | PLS1:置微地址 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->寄存器R0 | 6CH 6CH 66H 66H | 02H 02H 03H 03H | 微地址:1BH PC=03H 锁存微指令 寄存器R0=66H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->IR1 | 66H 66H 0CH 0CH | 03H 03H 04H 04H | 微地址:1CH PC=04H 锁存微指令 IR1=0CH |
| ADD A,R0 | |||||
| T0: | A->锁存器DR1 | PLS1:置微地址 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->锁存器DR1 | 0CH 0CH 55H 55H | 04H 04H 无效 无效 | 微地址:03H PC=05H 锁存微指令 DR1=55H |
| T1: | 寄存器R0->锁存器DR2 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->锁存器DR2 | 55H 55H 66H 66H | 无效 无效 无效 无效 | 微地址:04H PC=05H 锁存微指令 DR2=66H |
| T2: | ALU->A | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->A | 66H 66H BBH BBH | 无效 无效 无效 无效 | 微地址:05H PC=05H 锁存微指令 A=BBH |
| T3: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->IR1 | BBH BBH 6DH 6DH | 无效 无效 05H 05H | 微地址:06H PC=05H 锁存微指令 IR1=6DH |
| MOV R1,#33 | |||||
| T0: | RAM->寄存器R1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR1 | 6DH 6DH 33H 33H | 05H 05H 06H 06H | 微地址:1BH PC=06H 锁存微指令 寄存器R1=33 |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR1 | 33H 33H 1DH 1DH | 06H 06H 07H 07H | 微地址:1CH PC=07H 锁存微指令 IR1=1DH |
| SUB A,Ri | |||||
| T0: | A->锁存器DR1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->DR1 | 1DH 1DH BBH BBH | 07H 07H 无效 无效 | 微地址:07H PC=08H 锁存微指令 DR1=BBH |
| T1: | 寄存器R1->锁存器DR2 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->DR2 | BBH BBH 33H 33H | 无效 无效 无效 无效 | 微地址:08H PC=08H 锁存微指令 DR2=33H |
| T2: | ALU->A | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:ALU->A | 33H 33H 88H 88H | 无效 无效 无效 无效 | 微地址:09H PC=08H 锁存微指令 A=88H |
| T3: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->IR1 | 88H 88H 8FH 8FH | 无效 无效 08H 08H | 微地址:0AH PC=08H 锁存微指令 IR1=8FH |
| STA 10 | |||||
| T0: | RAM->BUS->IR2 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | 8FH 8FH 10H 10H | 08H 08H 09H 09H | 微地址:23H PC=09H 锁存微指令 IR2=10H |
| T1: | A->RAM(10H) | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->RAM | 10H 10H 88H 88H | 09H 09H 10H 10H | 微地址:24H PC=0AH 锁存微指令 RAM(10)=88H |
| T2: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->IR1 | 88H 88H FFH FFH | 10H 10H 0AH 0AH | 微地址:25H PC=0AH 锁存微指令 IR1=FFH |
| HALT | |||||
| T0: | 置模型机为停止状态 | PLS1:置微地址 PLS2:停机 PLS3:微指令输出 PLS4:BUS->IR2 | FFH 无效 | 0AH 无效 | 微地址:3FH PC=0BH |
实验二:带进位运算的模型机
(实验程序要使用16进制的数字后必须带H,不然程序会默认是10进制的。)
本实验提供了4条带进位的运算指令:RRC(带进位的右移),RLC(带进位的左移),ADD A,Ri(加法指令,可有进位溢出),JC addr (条件跳转),JMP addr(无条件跳转)。
RRC A 将A寄存器中的内容带进位位一起循环右移。
RLC A 将A寄存器中的内容带进位位一起循环左移
ADD A,Ri 将A寄存器的内容与Ri的内容相加,如果加法溢出将进位到CY。
JC addr 条件跳转指令,如果进位位CY溢出,跳转到addr。
JMP addr 无条件跳转指令,跳转到addr
本实验的指令如下:
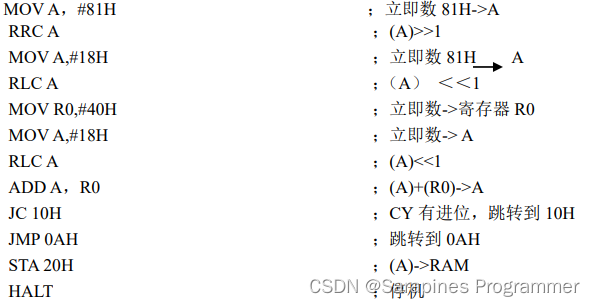
用软件HKCPT来编辑、编译、加载实验平台,或通过键盘(键盘使用方法见第四章)把以下程序以16进制输入程序存储器,在调试时请关注进位位CY、A寄存器中的值。
| 内存地址 | 指令助记符 | 指令码 | 说明 |
| 00H | MOV A,#81 | 5FH | 立即数81H->A |
| 01H | 81H | ||
| 02H | RRC A | 9FH | A >>1 |
| 03H | MOV A,#18 | 5FH | 立即数18H-> A |
| 04H | 18H | ||
| 05H | RLC A | AFH | A<<1 |
| 06H | MOV R0,#40 | 6CH | 立即数40H->寄存器R0 |
| 07H | 40H | ||
| 08H | MOV A,#18 | 5FH | 立即数18H-> A |
| 09H | 18H | ||
| 0AH | RLC A | AFH | A<<1 |
| 0BH | ADD A,R0 | 0CH | (A)+(R0)->A |
| 0CH | JC 10 | B7H | CY有进位 跳转到0FH |
| 0DH | 10H | ||
| 0EH | JMP 0A | BFH | 跳转到0AH |
| 0FH | 0AH | ||
| 10H | STA 20 | 8FH | 将A内容写入RAM地址20H |
| 11H | 20H | ||
| 12H | HALT | FFH | 停机 |
运行结果为:RAM 20H单元中的内容为20H
运行程序:
通过软件HKCPT的微单步功能可观察各个变量的变化。
微单步运行过程显示如下:
| 微地址 | 数据流程 | 数据总线 | 地址总线 | 操作寄存器 |
| 00H | 取指微指令 RAM->BUS->IR1 | 5FH | 00H | IR1=5FH |
| MOV A,#81 | ||||
| 17H | BUS-> A | 81H | 01H | A=81H |
| 18H | 取指微指令 RAM->BUS->IR1 | 9FH | 02H | IR1=9FH |
| RRC A | ||||
| 27H | A>>1 | 40H | 无效 | A=40,CY溢出 |
| 28H | 取指微指令 RAM->BUS->IR1 | 5FH | 03H | IR1=5FH |
| MOV A,#18 | ||||
| 17H | BUS-> A | 18H | 04H | A=18H |
| 18H | 取指微指令 RAM->BUS->IR1 | AFH | 05H | IR1=AFH |
| RLC A | ||||
| 2BH | A<<1 | 31H | 无效 | A=31H CY无溢出 |
| 2CH | 取指微指令 RAM->BUS->IR1 | 6CH | 06H | IR1=6CH |
| MOV R0,#40 | ||||
| 1BH | BUS->寄存器R0 | 40H | 07H | R0=40H |
| 1CH | 取指微指令 RAM->BUS->IR1 | 5FH | 08H | IR1=5FH |
| MOV A,#18 | ||||
| 17H | BUS-> A | 18H | 09H | A=18H |
| 18H | 取指微指令 RAM->BUS->IR1 | AFH | 0AH | IR1=AFH |
| RLC A | ||||
| 2BH | (A)<<1 | 30H | 无效 | A=30H |
| 2CH | 取指微指令 RAM->BUS->IR1 | 0CH | 0BH | IR1=0CH |
| ADD A,R0 | ||||
| 03H | A->锁存器DR1 | 30H | 无效 | DR1=30H |
| 04H | 寄存器R0->锁存器DR2 | 40H | 无效 | DR2=40H |
| 05H | ALU-> A | 70H | 无效 | ALU=70 CY无溢出 |
| 06H | 取指微指令 RAM->BUS->IR1 | B7H | 0CH | IR1=B7H |
| JC 0F | ||||
| 2FH | RAM->BUS->IR2 | 10H | 0DH | IR2=10H |
| 30H | 取指微指令 RAM->BUS->IR1 | BFH | 0EH | IR1=BFH CY无溢出 |
| JMP 0A | ||||
| 2FH | RAM->BUS->IR2 | 0AH | 0FH | IR2=0AH |
| 30H | 取指微指令 RAM->BUS->IR1 | AFH | 0AH | IR1=AFH 跳转0AH |
| RLC A | ||||
| 2BH | (A)<<1 | E0H | 无效 | A=E0H |
| 2CH | 取指微指令 RAM->BUS->IR1 | 0CH | 0BH | IR1=0CH |
| ADD A,R0 | ||||
| 03H | A->锁存器DR1 | E0H | 无效 | DR1=E0H |
| 04H | 寄存器R0->锁存器DR2 | 40H | 无效 | DR2=40H |
| 05H | ALU-> A | 20H | 无效 | ALU=20H CY有溢出 |
| 06H | 取指微指令 RAM->BUS->IR1 | B7H | 0CH | IR1=B7H |
| JC 0F | ||||
| 2FH | RAM->BUS->IR2 | 10H | 0DH | IR2=10H |
| 30H | 取指微指令 RAM->BUS->IR1 | 8FH | 10H | IR1=8FH CY有溢出 |
| STA 20 | ||||
| 23H | RAM->BUS->IR2 | 20H | 11H | IR2=20H |
| 24H | A->RAM(20H) | 20H | 20H | RAM(20)=20 |
| 25H | 取指微指令 RAM->BUS->IR1 | FFH | 12H | IR1=FFH |
| HALT | ||||
| 3FH | 置模型机为停止状态 | 无效 | 无效 | 置停止状态 |
如果在运行微单步时,发现有错误或对微单步中的时序过程不清楚,可用时序单元中的按钮来手动给出4个节拍。
| 微周期 | 数据流程 | 节拍 | 数据总线 | 地址总线 | 操作寄存器 |
| T0: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址清零 PLS2:置模型机运行 PLS3:取指微指令输出 PLS4:BUS->IR1 | 无效 无效 5FH 5FH | 无效 无效 00H 00H | 微地址:00H PC=00H 锁存微指令 IR=5FH |
| MOV A,#81 | |||||
| T0: | BUS-> A | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS-> A | 5FH 5FH 81H 81H | 00H 00H 01H 01H | 微地址:17H PC=01H 锁存微指令 A=81H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->IR1 | 55H 55H 9FH 9FH | 01H 01H 02H 02H | 微地址:18H PC=02H 锁存微指令 IR1=9FH |
| RRC A | |||||
| T0: | A>>1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->寄存器R0 | 9FH 9FH 无效 无效 | 03H 03H 无效 无效 | 微地址:27H PC=03H 锁存微指令 A=40H CY=1 |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->IR1 | 无效 无效 5FH 5FH | 无效 无效 03H 03H | 微地址:28H PC=03H 锁存微指令 IR1=5FH |
| MOV A,#18 | |||||
| T0: | RAM->BUS->A | PLS1:置微地址 PLS2:PC+1 PLS3:取指微指令输出 PLS4:BUS->锁存器DR1 | 5FH 5FH 18H 18H | 03H 03H 04H 04H | 微地址:17H PC=04H 锁存微指令 A=18H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->锁存器DR2 | 18H 18H AFH AFH | 04H 04H 05H 05H | 微地址:18H PC=05H 锁存微指令 IR1=AFH |
| RLC A | |||||
| T0: | A<<1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR1 | AFH AFH 无效 无效 | 05H 05H 无效 无效 | 微地址:2BH PC=06H 锁存微指令 A=31H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->IR1 | 无效 无效 6CH 6CH | 无效 无效 06H 06H | 微地址:2CH PC=06H 锁存微指令 IR1=6CH |
| MOV R0,#40 | |||||
| T0: | RAM->BUS->寄存器R0 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->DR1 | 6CH 6CH 40H 40H | 06H 06H 07H 07H | 微地址:1BH PC=07H 锁存微指令 A=40H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->DR2 | 40H 40H 5FH 5FH | 07H 07H 08H 08H | 微地址:1CH PC=08H 锁存微指令 IR1=5FH |
| MOV A,#18 | |||||
| T0: | RAM->BUS-> A | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 8FH 8FH 18H 18H | 08H 08H 09H 09H | 微地址:17H PC=09H 锁存微指令 A=18H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->RAM | 18H 18H AFH AFH | 09H 09H 0AH 0AH | 微地址:18H PC=0AH 锁存微指令 IR1=AFH |
| RLC A | |||||
| T0: | A>>1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | AFH AFH 无效 无效 | 0AH 0AH 无效 无效 | 微地址:2BH PC=0BH 锁存微指令 A=30H |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->RAM | 无效 无效 0CH 0CH | 无效 无效 0BH 0BH | 微地址:2CH PC=0BH 锁存微指令 IR1=0CH |
| ADD A,R0 | |||||
| T0: | A->BUS->锁存器DR1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 0CH 0CH 30H 30H | 0BH 0BH 无效 无效 | 微地址:03H PC=0CH 锁存微指令 DR1=30H |
| T1: | R0->BUS->锁存器DR2 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->RAM | 30H 30H 40H 40H | 无效 无效 无效 无效 | 微地址:04H PC=0CH 锁存微指令 DR2=40H |
| T2: | ALU->BUS->A | PLS1:置微地址 PLS2:停机 PLS3:微指令输出 PLS4:BUS->IR2 | 40H 40H 70H 70H | 无效 无效 无效 无效 | 微地址:05H PC=0CH 锁存微指令 A=70 CY=0 |
| T3: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->RAM | 70H 70H B7H B7H | 无效 无效 0CH 0CH | 微地址:06H PC=0CH 锁存微指令 A=70 CY=0 |
| JC 10 | |||||
| T0: | RAM->BUS->IR2 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | B7H B7H 10H 10H | 0CH 0CH 0DH 0DH | 微地址:2FH PC=0DH 锁存微指令 IR2=10H |
| T1: | 因CY=0 不跳转 取指 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 10H 10H BFH BFH | 0DH 0DH 0EH 0EH | 微地址:30H PC=0EH 锁存微指令 无操作 |
| JMP 0A | |||||
| T0: | RAM->BUS->IR2 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | BFH B7H 0AH 0AH | 0EH 0EH 0FH 0FH | 微地址:2FH PC=0FH 锁存微指令 IR2=0AH |
| T1: | 取指微指令 RAM->BUS->IR1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | 0AH 0AH AFH AFH | 0FH 0FH 0AH 0AH | 微地址:30H PC=0AH 锁存微指令 IR1=AFH |
| RLC A | |||||
| T1: | A<<1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | 0AH 0AH AFH AFH | 0FH 0FH 0AH 0AH | 微地址:2BH PC=0BH 锁存微指令 IR1=E0H |
| T2: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->RAM | 70H 70H B7H B7H | 无效 无效 0CH 0CH | 微地址:2CH PC=0BH 锁存微指令 A=70 CY=0 |
| ADD A,R0 | |||||
| T0: | A->BUS->锁存器DR1 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 0CH 0CH 30H 30H | 0BH 0BH 无效 无效 | 微地址:03H PC=0CH 锁存微指令 DR1=E0H |
| T1: | R0->BUS->锁存器DR2 | PLS1:微地址+1 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->RAM | 30H 30H 40H 40H | 无效 无效 无效 无效 | 微地址:04H PC=0CH 锁存微指令 DR2=40H |
| T2: | ALU->BUS->A | PLS1:置微地址 PLS2:停机 PLS3:微指令输出 PLS4:BUS->IR2 | 40H 40H 70H 70H | 无效 无效 无效 无效 | 微地址:05H PC=0CH 锁存微指令 A=20 CY=1 |
| T3: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->RAM | 70H 70H B7H B7H | 无效 无效 0CH 0CH | 微地址:06H PC=0CH 锁存微指令 A=70 CY=0 |
| JC 10 | |||||
| T0: | RAM->BUS->IR2 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | B7H B7H 10H 10H | 0CH 0CH 0DH 0DH | 微地址:2FH PC=0DH 锁存微指令 IR2=10H |
| T1: | 因CY=1 跳转 取指 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 10H 10H 8FH 8FH | 0DH 0DH 10H 10H | 微地址:30H PC=10H 锁存微指令 无操作 |
| STA 20 | |||||
| T0: | RAM->BUS->IR2 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | B7H B7H 20H 20H | 10H 10H 11H 11H | 微地址:13H PC=11H 锁存微指令 IR2=10H |
| T1: | A->BUS->RAM(20) | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->A | 10H 10H 20H 20H | 0DH 0DH 20H 20H | 微地址:14H PC=12H 锁存微指令 A->RAM(20) |
| T3: | 取指微指令 RAM->BUS->IR1 | PLS1:微地址+1 PLS2:PC不变 PLS3:微指令输出 PLS4:BUS->RAM | 20H 20H B7H B7H | 20H 20H 0CH 0CH | 微地址:15H PC=12H 锁存微指令 IR1=FFH |
| HALT | |||||
| T0: | 置模型机为停止状态 | PLS1:置微地址 PLS2:PC+1 PLS3:微指令输出 PLS4:BUS->IR2 | FFH 无效 | 12H 无效 | 微地址:3FH PC=13H |
| T1: | 置模型机为停止状态 | ||||
实验三:数据传送实验
(实验程序要使用16进制的数字后必须带H,不然程序会默认是10进制的。)
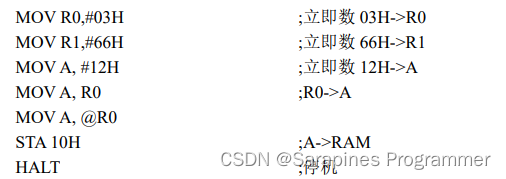
或通过键盘(键盘使用方法见第四章)输入微程序及以下程序:
| 内存地址 | 指令助记符 | 指令码或立即数 | 说明 |
| 00H | MOV R0, #03H | 6CH | 立即数12H->A |
| 01H | 03H | ||
| 02H | MOV R1, #66H | 6DH | 立即数66H->R0 |
| 03H | 66H | ||
| 04H | MOV A, 12H | 5FH | |
| 05H | 12H | 寄存器R0内容->A | |
| 06H | MOV A, R0 | 3CH | R0内容->A |
| 07H | MOV A, @R0 | 2CH | |
| 08H | STA 10 | 8FH | 将A内容写入RAM地址10H |
| 09H | 10 | ||
| 0AH | HALT | FFH | 停机 |
运行结果为:RAM 10H单元中的内容为66H
运行程序:通过软件HKCPT的微单步功能可观察各个变量的变化。
微单步运行过程显示如下:
| 微地址 | 数据流程 | 数据总线 | 地址总线 | 操作寄存器 |
| 00H | 取指微指令 RAM->BUS->IR1 | 6CH | 00H | IR1=6CH |
| MOV R0, #03H | ||||
| 1BH | RAM->寄存器R0 | 03H | 01H | 寄存器R0=03H |
| 1CH | 取指微指令 RAM->BUS->IR1 | 6DH | 02H | IR1=6DH |
| MOV R1,#66 | ||||
| 1BH | RAM->寄存器R1 | 66H | 03H | 寄存器R1=66H |
| 1CH | 取指微指令 RAM->BUS->IR1 | 5FH | 04H | IR1=5FH |
| MOV A, #12H | ||||
| 17H | RAM->A | 12H | 05H | A=12H |
| 18H | 取指微指令 RAM->BUS->IR1 | 3CH | 06H | IR1=3CH |
| MOV A,R0 | ||||
| 0FH | R0寄存器>A | 03H | 无效 | A=03H |
| 10H | 取指微指令 RAM->BUS->IR1 | 2CH | 07H | IR1=2CH |
| MOV A,@R0 | ||||
| 0BH | R0寄存器->BUS->IR2寄存器 | 03H | 无效 | IR2=03H |
| 0CH | IR2->地址BUS,RAM->数据BUS->A | 66H | 03H | A=66H |
| 0DH | 取指微指令 RAM->BUS->IR1 | 8FH | 08H | IR1=8FH |
| STA 10 | ||||
| 23H | RAM->BUS->IR2 | 10H | 09H | IR2=10H |
| 24H | A->RAM(10H) | 66H | 10H | RAM(10)=66H |
| 25H | 取指微指令 RAM->BUS->IR1 | FFH | 0AH | IR1=FFH |
| HALT | ||||
| 3FH | 置模型机为停止状态 | 无效 | 无效 | 置停止状态 |
实验四:移位实验
(实验程序要使用16进制的数字后必须带H,不然程序会默认是10进制的。)
在软件HKCPT中,输入以下程序,并且编译、加载到实验平台中。
或通过键盘(键盘使用方法见第四章)输入微程序及以下程序:
| 内存地址 | 指令助记符 | 指令码或立即数 | 说明 |
| 00H | MOV A,#55H | 5FH | 立即数55H->A |
| 01H | 55H | ||
| 02H | RRC A | 9FH | A >>1 |
| 03H | RLC A | AFH | A<<1 |
| 05H | STA 10 | 8FH | 将A内容写入RAM地址10H |
| 06H | 10 | ||
| 07H | HALT | FFH | 停机 |
运行结果为:RAM 10H单元中的内容为55H
运行程序:通过软件HKCPT的微单步功能可观察各个变量的变化。
微单步运行过程显示如下:
| 微地址 | 数据流程 | 数据总线 | 地址总线 | 操作寄存器 |
| 00H | 取指微指令 RAM->BUS->IR1 | 5FH | 00H | IR1=5FH |
| MOV A,#55H | ||||
| 17H | RAM->寄存器A | 55H | 01H | A=55H |
| 18H | 取指微指令 RAM->BUS->IR1 | 9FH | 02H | IR1=9F |
| RRC A | ||||
| 27H | A>>1 | 2AH | 无效 | A=2A |
| 28H | 取指微指令 RAM->BUS->IR1 | AFH | 03H | IR1=AFH |
| RLC A | ||||
| 2BH | A<<1 | 55H | 无效 | A=55H |
| 2CH | 取指微指令 RAM->BUS->IR1 | 8FH | 04H | IR1=8FH |
| STA 10 | ||||
| 23H | RAM->BUS->IR2 | 10H | 05H | IR2=10H |
| 24H | A->RAM(10H) | 55H | 10H | RAM(10)=88H |
| 25H | 取指微指令 RAM->BUS->IR1 | FFH | 06H | IR1=FFH |
| HALT | ||||
| 3FH | 置模型机为停止状态 | 无效 | 无效 | 置停止状态 |
实验五:转移实验
(实验程序要使用16进制的数字后必须带H,不然程序会默认是10进制的。)
在软件HKCPT中,输入以下程序,并且编译、加载到实验平台中。
或通过键盘(键盘使用方法见第四章)输入微程序及以下程序:
| 内存地址 | 指令助记符 | 指令码或立即数 | 说明 |
| 00H | MOV A,#01 | 5FH | 立即数01H->A |
| 01H | 01H | ||
| 02H | MOV R0,#01 | 6CH | 立即数01H->R0 |
| 03H | 01H | ||
| 04H | SUB A,R0 | 1CH | A内容-R0内容->A |
| 05H | JC 4 | B7H | 条件跳转至04H |
| 06H | 04H | ||
| 07H | JZ 4 | B3H | 条件跳转至04H |
| 08H | 04H | ||
| 09H | JMP D | BFH | 无条件跳转至0DH |
| 0AH | 0DH | ||
| 0BH | MOV A,88H | 5FH | 立即数88H->A |
| 0CH | 88H | ||
| 0DH | STA 10 | 8FH | 将A内容写入RAM地址10H |
| 0EH | 10 | ||
| 0FH | HALT | FFH | 停机 |
运行结果为:RAM 10H单元中的内容为FEH
运行程序:通过软件HKCPT的微单步功能可观察各个变量的变化。
微单步运行过程显示如下:
| 微地址 | 数据流程 | 数据总线 | 地址总线 | 操作寄存器 |
| 00H | 取指微指令 RAM->BUS->IR1 | 5FH | 00H | IR1=5FH |
| MOV A #01H | ||||
| 17H | RAM->寄存器R0 | 01H | 01H | A=01H |
| 18H | 取指微指令 RAM->BUS->IR1 | 6CH | 02H | IR1=6CH |
| MOV R0,#01H | ||||
| 1BH | RAM->寄存器R0 | 01H | 03H | 寄存器R0=01H |
| 1CH | 取指微指令 RAM->BUS->IR1 | 1CH | 04H | IR1=1CH |
| SUB A,R0 | ||||
| 07H | A->Dbus->DR1 | 01H | 无效 | DR1=01H |
| 08H | Ri->Dbus->DR2 | 01H | 无效 | DR2=01H |
| 09H | ALU->Dbus->A | 00H | 无效 | A=00H |
| 0AH | 取指微指令 RAM->BUS->IR1 | B7H | 05H | IR1=B7H |
| JC 4 | ||||
| 2FH | Dbus->IR2 | 04H | 06H | IR2=04H |
| 30H | IR2内容->Abus, Dbus->PC | B3H | 07H | IR1=B3H |
| JZ 4 | ||||
| 2FH | Dbus->IR2 | 04H | 08H | IR2=04H |
| 30H | IR2内容->Abus, Dbus->PC | 1CH | 04H | IR1=1CH |
| SUB A,R0 | ||||
| 07H | A->Dbus->DR1 | 00H | 无效 | DR1=00H |
| 08H | Ri->Dbus->DR2 | 01H | 无效 | DR2=01H |
| 09H | ALU->Dbus->A | FFH | 无效 | A=FFH |
| 0AH | 取指微指令 RAM->BUS->IR1 | B7H | 05H | IR1=B7H |
| JC 4 | ||||
| 2FH | Dbus->IR2 | 04H | 06H | IR2=04H |
| 30H | IR2内容->Abus, Dbus->PC | 1CH | 04H | IR1=1CH |
| SUB A,R0 | ||||
| 07H | A->Dbus->DR1 | FFH | 无效 | DR1=FFH |
| 08H | Ri->Dbus->DR2 | 01H | 无效 | DR2=01H |
| 09H | ALU->Dbus->A | FEH | 无效 | A=FEH |
| 0AH | 取指微指令 RAM->BUS->IR1 | B7H | 05H | IR1=B7H |
| JC 4 | ||||
| 2FH | Dbus->IR2 | 04H | 06H | IR2=04H |
| 30H | IR2内容->Abus, Dbus->PC | B3H | 07H | IR1=B3H |
| JZ 4 | ||||
| 2FH | Dbus->IR2 | 04H | 08H | IR2=04H |
| 30H | IR2内容->Abus, Dbus->PC | BFH | 09H | IR1=BFH |
| JMP D | ||||
| 2FH | Dbus->IR2 | 0DH | 0AH | IR2=0DH |
| 30H | 取指微指令 RAM->BUS->IR1 | 8FH | 0DH | IR1=8FH |
| STA 10 | ||||
| 23H | RAM->BUS->IR2 | 10H | 0EH | IR2=10H |
| 24H | A->RAM(10H) | FEH | 10H | RAM(10)=FEH |
| 25H | IR2内容->Abus, Dbus->PC | FFH | 0FH | IR1=FFH |
| HALT | ||||
| 3FH | 置模型机为停止状态 | 无效 | 无效 | 置停止状态 |
2. 驻机键盘和液晶显示器的使用方式
2.1 键盘定义
打开电源上电后按实验仪任意键,即可进入键盘监控。液晶显示器作为键盘监控的输出,用于显示地址、指令、数据或微指令信息等。24个键中有16个数字键,8个控制键。表X-1列出这8个控制键的名称和功能,数字键用于输入地址、指令和数据信息。
表X-1 控制键说明
| TAB | 光标键 | 用于移动光标选择菜单项或将光标从地址到数据之间来回切换 |
| MENU | 主菜单键 | 无论在何种操作下,按下此键,将返回到主菜单 |
| LAST | 减1键 | 地址减1 |
| NEXT | 加1键 | 地址加1 |
| STEP | 单拍键 | 单步运行程序 |
| GO/STOP | 运行/停止键 | 奇数次按此键,启动运行程序,偶数次停止运行 |
| SFR | 寄存器键 | 显示寄存器 |
| Enter | 确认键 | 对修改,备份操作时的确认 |
进入键盘监控后,液晶屏上显示主菜单:
1、Mcode 2、Rcode
3、2416 4、RUN
在主菜单下可以进行以下操作:
(1)选择1进行微代码操作
(2)选择2进行RAM程序和数据操作
(3)选择3进行把微代码和RAM程序备份到24C08中去,或者从24C08中读取微代码和RAM程序
(4)选择4运行程序
以上操作可以按数字键“1-4”进行选择执行,也可以按TAB键移动光标来选择,并由按“确认”键来执行,其中选“4”等同于按RUN键,如果要停止运行程序,再按“RUN/STOP”键即可。
(5)按“STEP”键单步执行程序
(6)按“SFR”键,显示特殊寄存器内容
下面按功能分类介绍实验系统监控功能及操作方法:
(7)监控单元的“RST”键只作调试用,与实验无关。
2.2 操作方法
2.2.1 读/写控存微指令(保存在6264)
在主菜单下选择“1”
屏幕上显示:ADDR MICRO CODE
00 xx xx xx
地址 微代码
光标定位在地址处,按“TAB”键,在地址与微代码之间切换;在光标所在处,按数字键即可对地址或微代码进行修改;按“Last”键,修改后的微指令写入相应单元后,地址减1;按“Next”键或“Enter”键,修改后的微指令写入相应单元后,地址加1。
2.2.2 读/写内存单元指令或数据(保存在6264)
在主菜单下选择“2”
屏幕上将显示:ADDR RAM CODE
xx xx
地址 指令或数据
光标定位在地址处,按“TAB”键,光标在地址与指令或数据之间切换;按数字键即可对光标所在处的地址或者指令数据进行修改;按“Last”键或者“Next”和“Enter”键,可将修改后的指令或数据写入相应单元中去,然后地址减1或加1。
2.2.3 控存块微代码信息与flash memory数据交换操作
首先在主菜单下选“3”,液晶屏上将显示子菜单:
1、RD→M 2、M→WR
3、RD→R 4、R→WR
(1)选择1进行里面flash memory存储的数据读回控存块。
(2)选择2进行控存块数据写入flash memory操作。
(3)选择3进行flash memory里面存储的数据读回到RAM。
(4)选择4进行RAM块写入flash memory操作。
2.2.4 从flash memory读回控存块
主菜单选“3”
子菜单选“1”,屏幕上将显示:
flash memory源地址 长度 微代码目标地址
ADDR LEN ADDR
00 001 00
光标定义在flash memory源地址处,按“TAB”键将光标在源地址、长度、目标地址之间切换,可供修改地址和长度;按“Enter”键将flash memory的源地址处开始的内容读到控存块目标地址处,长度由LEN决定。
2.2.5 控存块数据写入flash memory
主菜单选“3”
在子菜单下选择“2”,液晶屏上将显示:
微程序地址 长度
ADDR LEN 24C08
00 001
光标定位在微程序地址处,按“TAB”键可将光标在地址和长度之间切换,一旦地址和长度确定后,按“Enter”键即可以将指定地址,指定长度单元的微代码信息保存到flash memory中0地址开始的存储单元中去,并返回到上一级子菜单。
2.2.6 从flash memory读回到内存RAM块
主菜单选“3”
子菜单选“3”,屏幕上将显示:
flash memory源地址 长度 RAM目标地址
ADDR LEN ADDR
00 001 00
光标定义在flash memory源地址处,按“TAB”键将光标在源地址、长度、目标地址之间切换,可供修改地址和长度;按“Enter”键将flash memory的源地址处开始的内容读到RAM目标地址处,长度由LEN决定。
2.2.7 内存块保存到flash memory中
主菜单选“3”
在子菜单下选择“4”液晶屏上将显示:
RAM地址 长度
ADDR LEN 24C08
00 001
光标定位在RAM地址处,按“TAB”键可将光标在地址和长度之间切换,一旦地址和长度确定后,按“Enter”键即可以将指定地址,指定长度单元的RAM程序或数据保存到flash memory中0地址开始的存储单元中去,并返回到上一级子菜单。
2.2.8 微单步运行程序
在主菜单下按“STEP”键,再按ENTER,实验系统将单拍执行程序一次,然后屏幕上显示执行后的结果。
MA:XX 微代码地址
PC=:XX PC 指针
2.2.9 连续运行程序
在主菜单下按“RUN/STOP”键或“4”,实验系统将连续执行程序,如果遇到HALT指令或再次按“RUN/STOP”键,停止运行,並在液晶屏上显示执行结果。
MA:XX 微代码地址
PC=:XX PC 指针
2.2.10 寄存器显示
在主菜单下按“SFR”键,液晶屏上显示微指令代码、指令或数据地址、程序指针、累加器内容。
PC DR1 DR2 A ALU
XX XX XX XX XX
程序指针 数据地址 累加器内容 算术逻辑单元内容
📝总结
计算机组成原理领域就像一片广袤而未被完全探索的技术海洋,邀请你勇敢踏足数字世界和计算机组成原理的神秘领域。这是一场结合创造力和技术挑战的学习之旅,从基础概念到硬件实现,逐步揭示更深层次的计算机结构、指令集架构和系统设计的奥秘。渴望挑战计算机组成原理的学习路径和掌握计算机硬件的技能?不妨点击下方链接,一同探讨更多数字技术的奇迹吧。我们推出了引领趋势的💻 计算机组成原理专栏:《机组 | 模块单元实验》,旨在深度探索计算机系统技术的实际应用和创新。🌐💡