工具的安装教程可以看我的上一篇博文:Ubuntu 18.04安装Dynamic Calibration software for the Intel® RealSense™ D400 Series Cameras(一)
使用教程参考user guide:https://www.intel.com/content/www/us/en/support/articles/000026723/emerging-technologies/intel-realsense-technology.html
The calibration process requires a special target, either printed or phone target. Please refer to Appendix for target setup details.
感觉很神奇的是,可以用手机作为标定物!ios和安卓(需要谷歌商店)都有app可以下载,博主的手机是huawei的(而且是曲面屏),没办法了
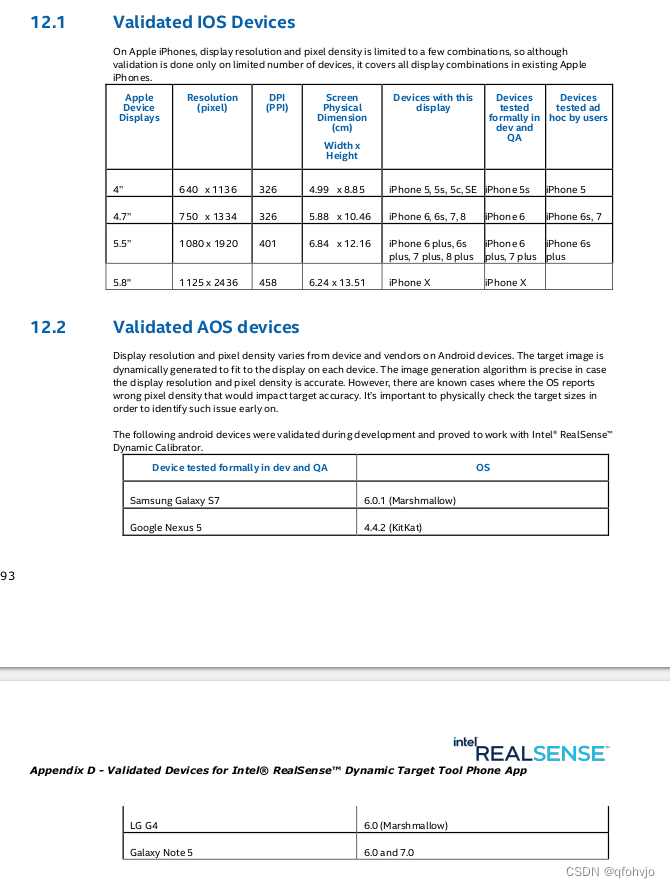
以下机型可尝试:
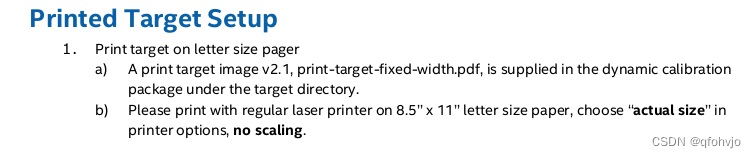
关于打印target的一些提示...
打印纸的链接:http://www.intelrealsense.com/download/18533
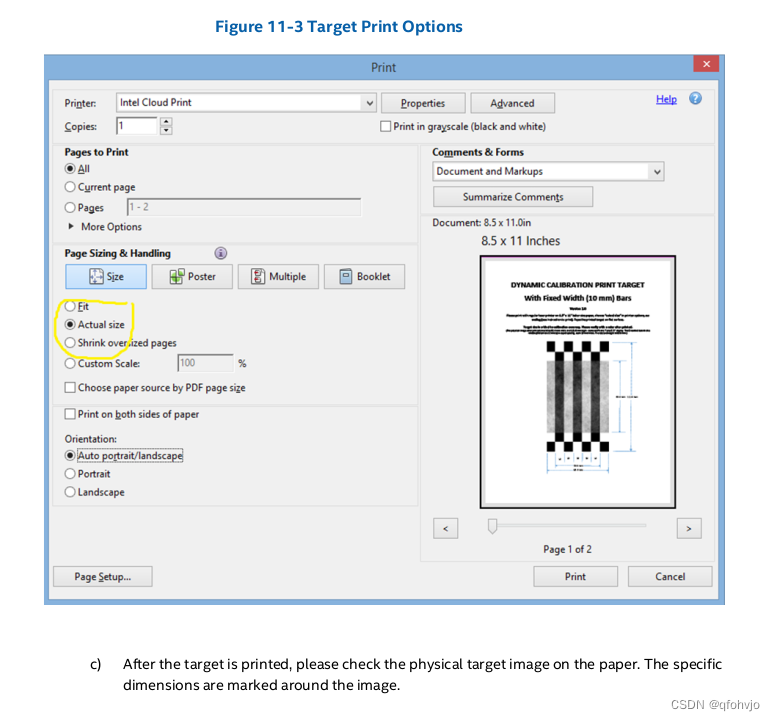
我打印回来了!打印的时候选择实际大小就可以
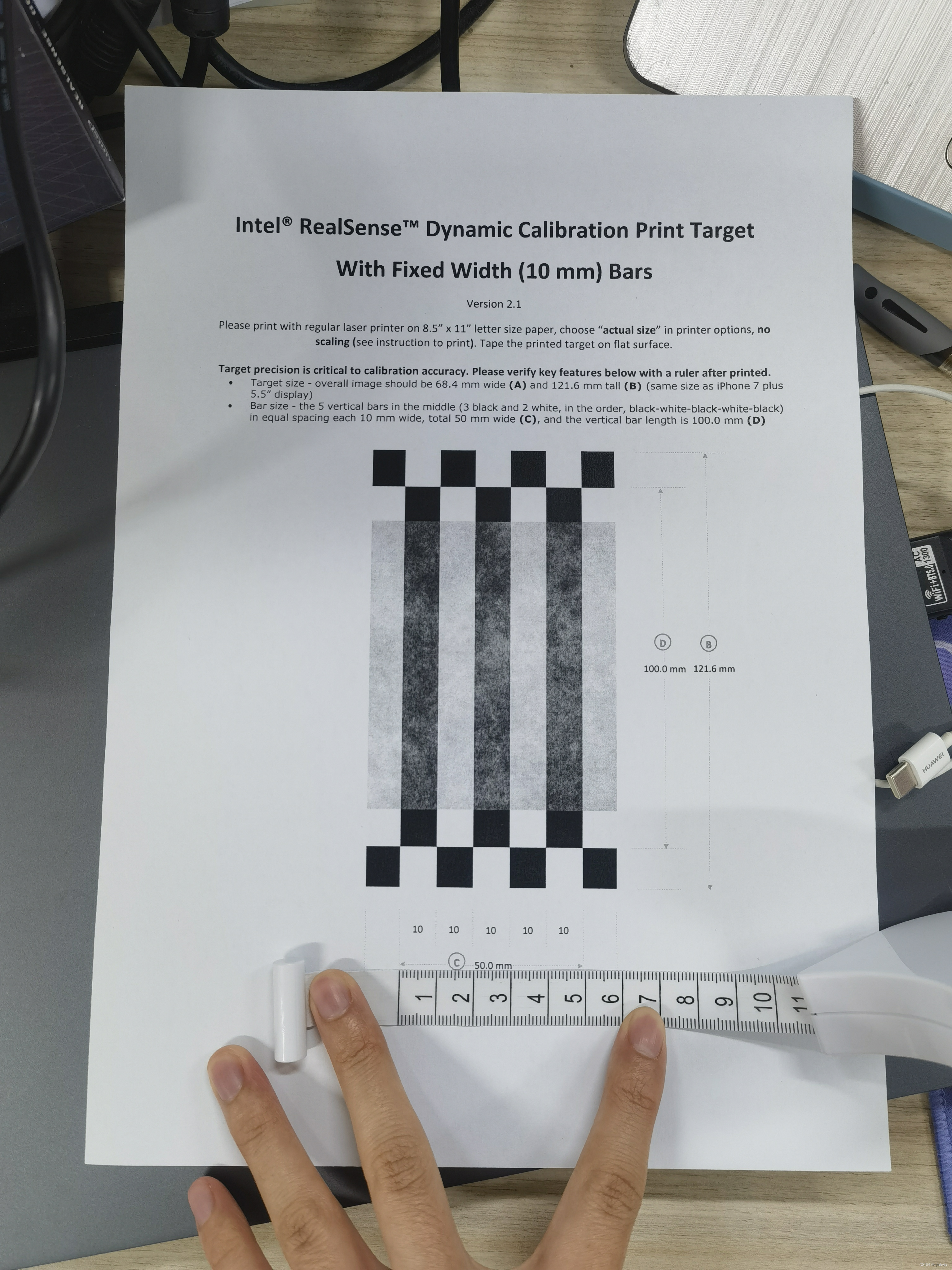
Setup the printed target on a flat surface so that the bars are vertical (use a roller or some other object, to ensure the target is flat on the surface. Tape the printed target on the flat surface after confirming that the target is flat).
将打印的目标设置在平坦的表面上,使条垂直(使用滚筒或其他物体,以确保目标在表面上是平坦的。在确认目标是平坦的后,将打印目标用胶带粘在平坦表面上)。
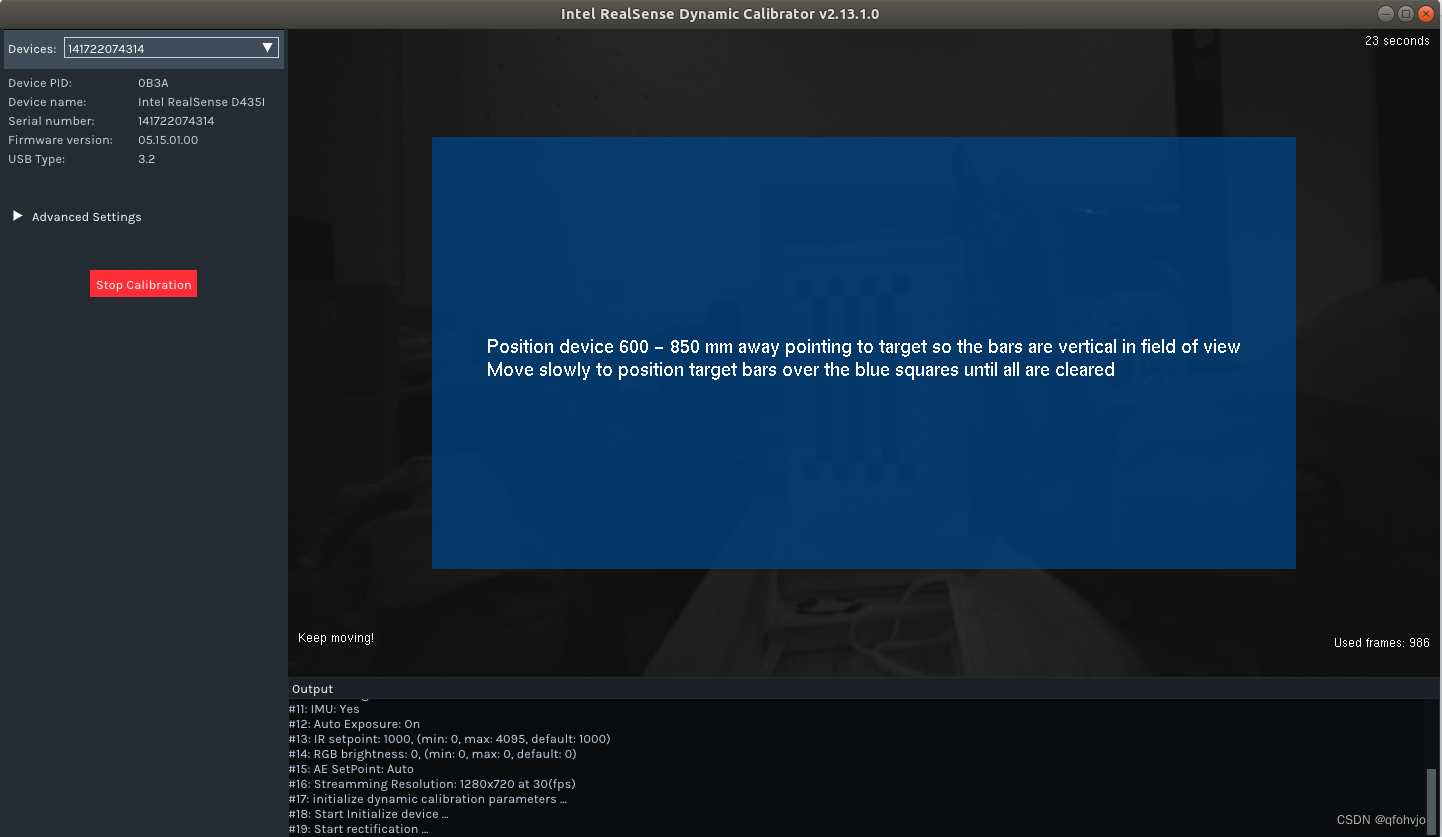
Place the camera about 60 – 85 cm away and point to the target. It should not be too close or too far. Due to various phone sizes, camera device models, and lighting conditions, exact distance cannot be specified. User will need to move the camera in the specified range to find a distance that works best. In most cases, a distance of around 70 cm is sufficient.
将相机放置在大约60–85厘米外,并指向目标。它不应该太近或太远。由于不同的手机尺寸、相机设备型号和照明条件,无法指定确切的距离。用户需要在指定的范围内移动相机,以找到最有效的距离。在大多数情况下,大约70厘米的距离就足够了。
首先打开软件
/usr/bin/Intel.Realsense.DynamicCalibrator点击start




![编译原理2.3习题 语法制导分析[C++]](https://img-blog.csdnimg.cn/direct/d95a220fe7394240a247d6392c8c10d5.png)