使用AI实现洋葱检测对农业具有以下意义:
- 提高效率:AI技术可以快速、准确地检测出洋葱中的缺陷和问题,从而提高了检测效率,减少了人工检测的时间和人力成本。
- 提高准确性:AI技术通过大量的数据学习和分析,能够更准确地识别出有缺陷的洋葱,降低了误判和漏检的可能性。
- 提高农产品质量:通过AI技术对洋葱进行检测,可以及时发现并处理有缺陷的产品,从而提高了农产品的整体质量。
- 提供决策支持:AI技术可以通过数据分析,预测洋葱的品质、产量和市场趋势等,为决策者提供科学依据,帮助制定更合理的生产和营销策略。
- 促进农业现代化:AI技术的引入可以推动农业的现代化进程,提高农业生产的科技含量和创新能力,促进农业的可持续发展。
总之,使用AI实现洋葱检测可以提高农业生产的效率和农产品质量,促进农业现代化发展。
以下是此项目的一些用例:
1.杂货库存管理:洋葱检测器可用于超市和杂货店,通过准确识别和计数存储区域或展示架上的洋葱,自动监控和管理洋葱的库存和库存。
2.洋葱收获自动化:使用洋葱检测器模型开发收获自动化设备可以帮助农民和农业公司检测和分离除草植物或土壤中的洋葱,显着提高洋葱收获过程的速度和效率。
3.食品工业质量控制:洋葱检测仪可以集成到食品加工厂的生产线中,使系统能够自动检测各个加工阶段的洋葱 - 例如分类,清洁和分级 - 以确保最终产品的质量一致。
4.减少洋葱浪费:该模型可用于零售、餐厅或家庭环境,以识别可能开始变质的洋葱,使消费者或餐饮服务经营者能够在需要丢弃之前优先使用这些洋葱,最终限制食物浪费。
5.智能厨房辅助:通过将洋葱检测器集成到智能厨房电器中,用户可以根据可用成分(包括洋葱)接收自动食谱建议,从而更轻松地确定膳食选项,而无需手动搜索食谱数据库。
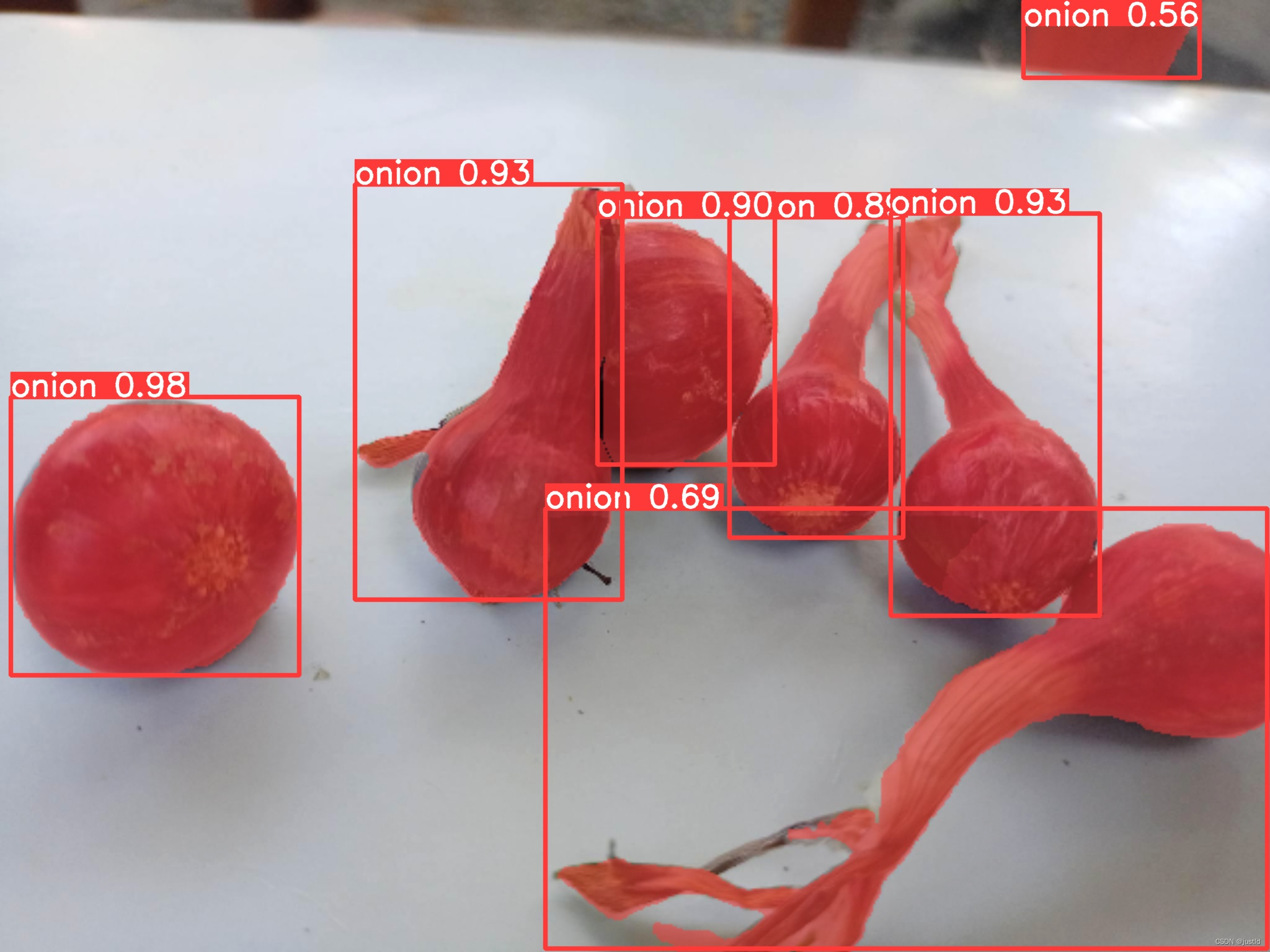
本文介绍了基于深度学习yolov8的洋葱检测系统,包括训练过程和数据准备过程,同时提供了推理的代码和GUI。对准备计算机视觉相关的毕业设计的同学有着一定的帮助。
检测结果如下图:

一、安装YoloV8
yolov8官方文档:主页 - Ultralytics YOLOv8 文档
安装部分参考:官方安装教程
二、数据集准备
本文使用的数据集来自https://www.cvmart.net/dataSets/detail/924。
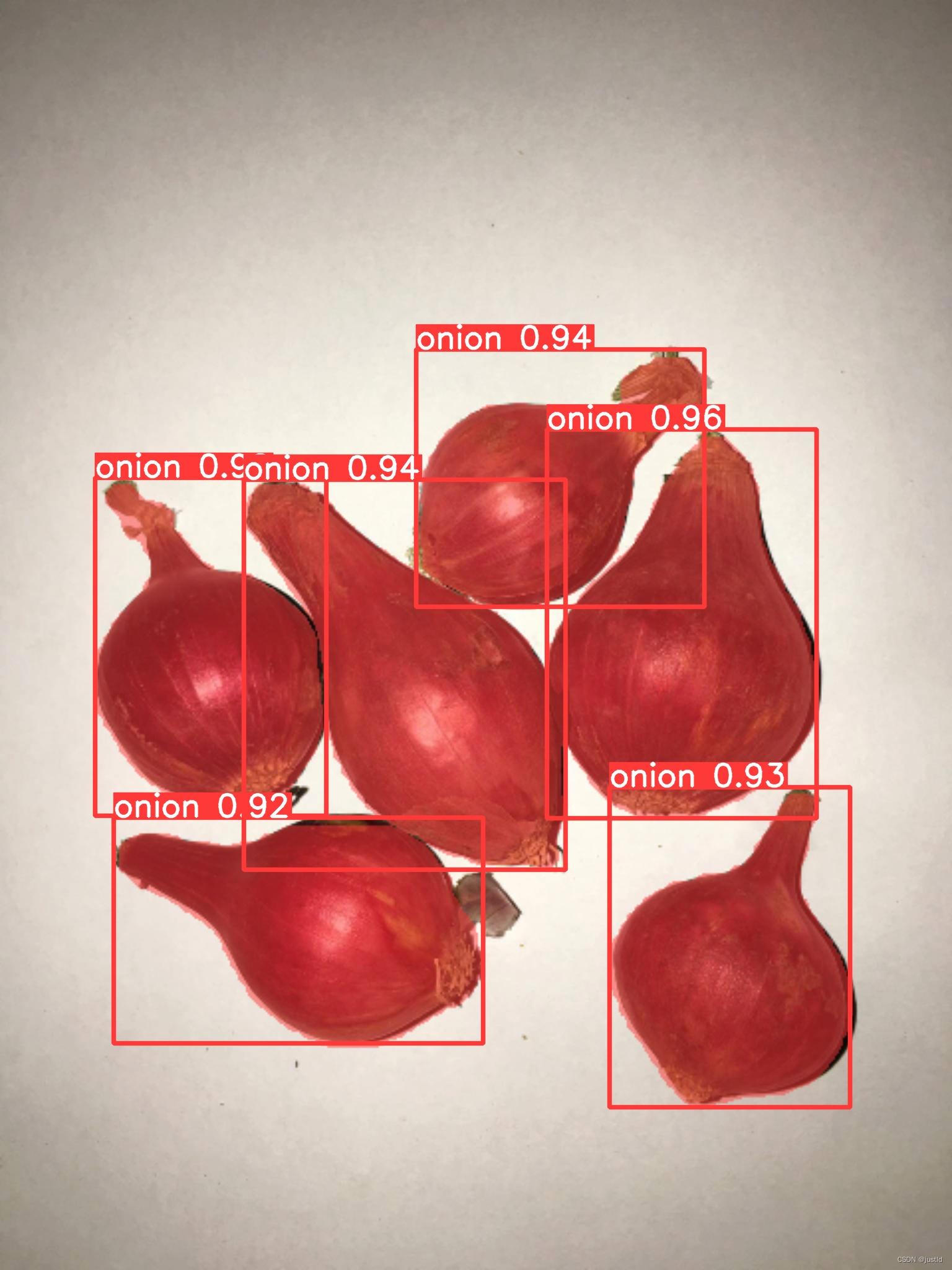
该数据集共包含2425条训练数据,688条验证数据,363条测试数据,数据集图片示例如下:


本文提供整理后的洋葱实例分割数据集yolov8格式,可用于yolov8的训练,包含2425条训练数据,688条验证数据,363条测试数据。
三、模型训练
1、数据集配置文件
在ultralytics/ultralytics/cfg/datasets目录下添加onion.yaml,添加以下内容(path修改为自己的路径):
# Ultralytics YOLO 🚀, AGPL-3.0 license
# COCO128-seg dataset https://www.kaggle.com/ultralytics/coco128 (first 128 images from COCO train2017) by Ultralytics
# Documentation: https://docs.ultralytics.com/datasets/segment/coco/
# Example usage: yolo train data=coco128.yaml
# parent
# ├── ultralytics
# └── datasets
# └── coco128-seg ← downloads here (7 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: datasets/instance_seg/onion_yolo8 # dataset root dir
train: images/train # train images (relative to 'path') 128 images
val: images/val # val images (relative to 'path') 128 images
test: # test images (optional)
# Classes
names:
0: onion2、修改模型配置文件
新建ultralytics/cfg/models/v8/yolov8_onion.yaml ,添加以下内容:,添加以下内容:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8-seg instance segmentation model. For Usage examples see https://docs.ultralytics.com/tasks/segment
# Parameters
nc: 1 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n-seg.yaml' will call yolov8-seg.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024]
s: [0.33, 0.50, 1024]
m: [0.67, 0.75, 768]
l: [1.00, 1.00, 512]
x: [1.00, 1.25, 512]
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Segment, [nc, 32, 256]] # Segment(P3, P4, P5)
3、训练模型
使用如下命令训练模型,相关路径更改为自己的路径,建议绝对路径:
yolo detect train project=deploy name=yolov8_onion exist_ok=True optimizer=auto val=True amp=True epochs=100 imgsz=640 model=ultralytics/cfg/models/v8/yolov8_onion.yaml data=ultralytics/cfg/datasets/oniono.yaml
4、验证模型
使用如下命令验证模型,相关路径根据需要修改:
yolo detect val imgsz=640 model=deploy/yolov8_onion/weights/best.pt data=ultralytics/ultralytics/cfg/datasets/onion.yaml
四、推理
训练好了模型,可以使用如下代码实现推理,将权重放到同级目录:
from PIL import Image
from ultralytics import YOLO
# 加载预训练的YOLOv8n模型
model = YOLO('best.pt')
image_path = 'test.jpg'
results = model(image_path) # 结果列表
# 展示结果
for r in results:
im_array = r.plot() # 绘制包含预测结果的BGR numpy数组
im = Image.fromarray(im_array[..., ::-1]) # RGB PIL图像
im.show() # 显示图像
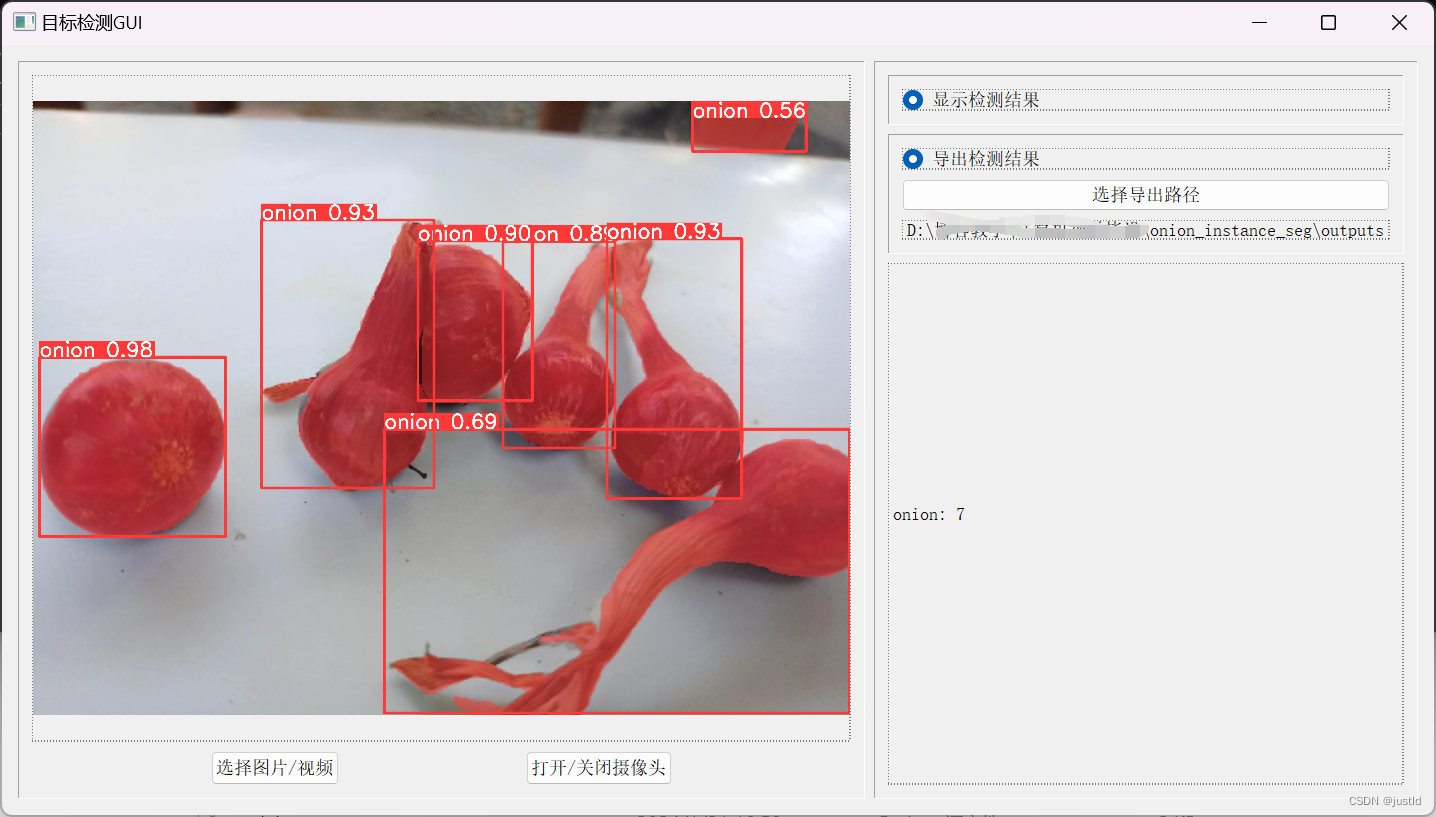
im.save('results.jpg') # 保存图像五、界面开发
使用pyqt5开发gui界面,支持图片、视频、摄像头输入,支持导出到指定路径,其GUI如下图(完整GUI代码可在下方链接下载):
六、代码下载
1、洋葱实例分割数据集yolov8格式,可用于yolov8的训练,包含2425条训练数据,688条验证数据,363条测试数据
2、洋葱检测系统,包含训练好的权重和推理代码,GUI界面,支持图片、视频、摄像头输入,支持检测结果导出