目录
- SLAM有哪些模型实现代码?
- SLAM有哪些模型实现案例?
- SLAM有哪些模型的github源码?
- 推荐10个以上比较好的SLAM深度学习模型?
- 推荐10个以上比较好的SLAM深度学习模型github源码?
SLAM有哪些模型实现代码?
SLAM(Simultaneous Localization and Mapping)是自主导航、机器人和无人机的重要技术,它的目的是在未知环境中建立地图并进行定位。SLAM有很多不同的模型,下面是一些常见的模型和实现代码的例子:
基于激光的SLAM:比如Hector SLAM、GMapping、Karto SLAM
基于视觉的SLAM:比如PTAM、ORB-SLAM、DSO
基于视觉和激光的SLAM:比如LSD-SLAM、ElasticFusion
注意:这些模型都是开源的,你可以在GitHub或其他开源代码仓库中找到它们的实现代码。
SLAM有哪些模型实现案例?
SLAM(Simultaneous Localization and Mapping)模型主要用于自动机器人的定位和地图建立。常见的SLAM模型有以下几种:
基于卡尔曼滤波的SLAM模型,例如EKF-SLAM。
基于概率图模型的SLAM模型,例如FastSLAM和GraphSLAM。
基于神经网络的SLAM模型,例如DeepSLAM和NeuralSLAM。
基于深度学习的SLAM模型,例如DSO、ORB-SLAM、LSD-SLAM等。
这些SLAM模型都有各自的优缺点,适用于不同场景下的定位和地图建立。
SLAM有哪些模型的github源码?
SLAM (Simultaneous Localization and Mapping) 是机器人导航和地图构建中非常重要的技术。目前,有很多不同的 SLAM 模型可供使用。以下是一些比较流行的 SLAM 模型的 Github 源码:
ORB-SLAM2:https://github.com/raulmur/ORB_SLAM2
g2o:https://github.com/RainerKuemmerle/g2o
DSO:https://github.com/JakobEngel/dso
LSDSLAM:https://github.com/tum-vision/lsd_slam
VINS-Mono:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
这些模型都有自己的优势和特点,可以根据自己的需求来选择使用。
推荐10个以上比较好的SLAM深度学习模型?
下面是一些比较好的 SLAM 深度学习模型:
DeepVO:利用深度学习实现视觉辅助移动机器人的定位和导航
DeepTAM:利用深度学习实现视频目标跟踪和地图构建
DS-SLAM:利用深度学习实现单目视觉 SLAM
FAB-MAP 2.0:一种基于深度学习的 SLAM 算法,可以在线地处理大量的图像
ORB-SLAM2:一种基于深度学习的 SLAM 算法,可以用于单目、双目和 RGB-D 相机
VINet:利用深度学习实现视觉惯性导航
DeepMapping:利用深度学习实现自动驾驶汽车的地图构建
Visual SLAM with Convolutional Neural Networks:利用深度学习实现视觉 SLAM
Neural SLAM:利用深度学习实现视觉 SLAM
Deep Learning based SLAM:利用深度学习实现视觉 SLAM
推荐10个以上比较好的SLAM深度学习模型github源码?
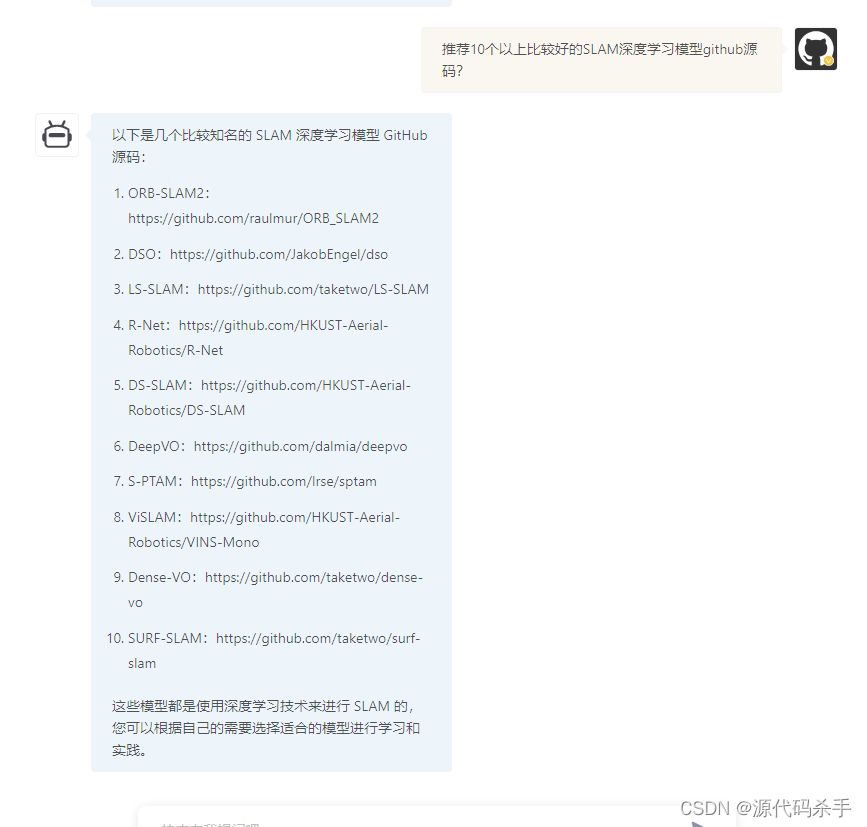
以下是几个比较知名的 SLAM 深度学习模型 GitHub 源码:
ORB-SLAM2:https://github.com/raulmur/ORB_SLAM2
DSO:https://github.com/JakobEngel/dso
LS-SLAM:https://github.com/taketwo/LS-SLAM
R-Net:https://github.com/HKUST-Aerial-Robotics/R-Net
DS-SLAM:https://github.com/HKUST-Aerial-Robotics/DS-SLAM
DeepVO:https://github.com/dalmia/deepvo
S-PTAM:https://github.com/lrse/sptam
ViSLAM:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
Dense-VO:https://github.com/taketwo/dense-vo
SURF-SLAM:https://github.com/taketwo/surf-slam
这些模型都是使用深度学习技术来进行 SLAM 的,您可以根据自己的需要选择适合的模型进行学习和实践。
![【GO】K8s 管理系统项目[API部分--Service]](https://img-blog.csdnimg.cn/060a7f6ea39f48a6afcce0c2d9044c2c.png)