目录
题目:
题目分析:
概要设计:
二维矩阵数据结构:
三元数组\三元顺序表顺序表结构:
详细设计:
三元矩阵相加:
三元矩阵快速转置:
调试分析:
用户手册:
测试结果:
源代码:
主程序:
头文件SparseMatrix.h:
头文件Triple.h:
总结:
题目:
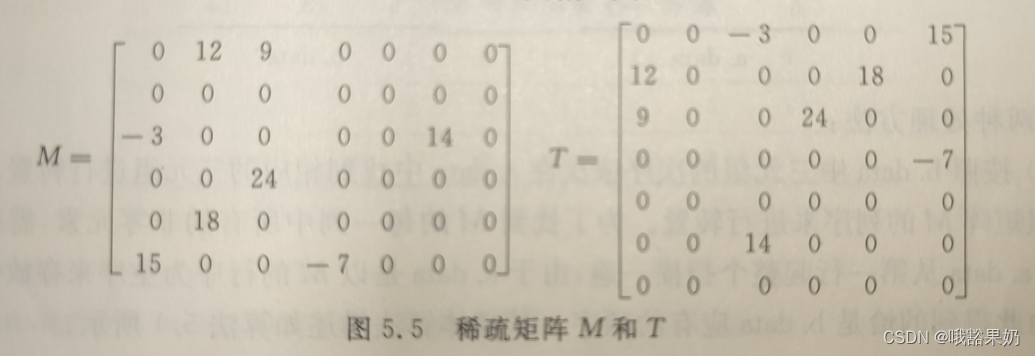
稀疏矩阵A,B均采用三元组顺序表表示,验证实现矩阵A快速转置算法,并设计、验证矩阵A、B相加得到矩阵C的算法。
题目分析:
1.从键盘输入矩阵的行数、列数,随机生成稀疏矩阵。
2.生成矩阵A、B后需先转换成三元顺序表,然后用三元顺序表来进行之后的操作。
3.在三元顺序表的基础上使用快速转置(非二维矩阵)。
4.得到三元矩阵相加的结果C。
5.不仅需要输出三元矩阵,还需要把结果转换成二维矩阵输出,以便题目观察结果。
6.程序执行的命令包括:(1)根据输入构造二维矩阵 (2)根据二维矩阵转换成相应的三元矩阵 (3)根据三元矩阵转换为相应的二维矩阵 (4)输出程序 (5)三元矩阵相加 (6)三元矩阵快速转置
7.测试用例:
1
(内置测试用例测试,主要包括相加为0的矩阵测试)
2
5 5
5 5
(测试5*5和5*5的矩阵)
2
8 9
9 8
(两个矩阵大小不同,不能进行相加运算,应该有相应的报错)
2
9 8
9 8
(正常的矩阵测试)概要设计:
二维矩阵数据结构:
如图,把这种数据结构可视化就是这样的,完全是按照人类习惯的一种存储方式 <( ̄ˇ ̄)/
typedef struct {
Elemtype **D;
int m, n;
int tu;
} SparseMatrix, M;老师说:数据结构决定算法。所以在这里在二维矩阵数据结构中增加行数m、列数n,就可以在进入函数,传参的时候少传入n和m两个值。
tu记录矩阵中非0元素的个数,可以更方便地进行三元数组的转换。
三元数组\三元顺序表顺序表结构:

把上面的二维矩阵转换一下,对应的三元矩阵就长这样,只存了非0元的行、列和数据 ̄へ ̄
三元数据结构的主要作用是将存储信息密度低的二维矩阵,以一种密度更高的方式储存在计算机中。
typedef struct {
int i, j;
Elemtype e;
} Triple;
typedef struct {
Triple data[MAXSIZE + 1];
int mu, nu, tu;
} TSMatrix;首先三元数组数据结构中,三元数组的定义,首先要定义“三元”。
三元Triple 由数据的行i,列j,数据e组成。
三元数组数据结构中同样存储着行数mu,列数nu,非零元个数tu。
详细设计:
三元矩阵相加:
首先,在矩阵相加中有许多操作相同的代码,为了降低代码复用性,所以提取代码中用图相同的代码,做成GO函数当当~ O(∩_∩)O~~
其次,因为大小不同的矩阵不能相加,所以在函数里,可以不用判断两个矩阵的大小,就默认两个矩阵是一样大的。别问我为什么还有注释掉的判断 ╥﹏╥...
最后是最重要的,两个数相加,如果两个答案为0,则不存入,因为他已经成为零元惹(。﹏。*)
然后是相加部分的判断。当两个元素是相同位置的时候,两个执行相加操作,当A的元素在B的后面的时候,则执行前面的B的输入。相反也同理。注意:这里的位置并不是在三元顺序表中的位置,而是在二维数组中的位置,所以不仅可以通过我这种i和j的判断,还可以通过A.data[i][j]-A.data[0][0]得到在数组中的第几位,这种更高级的判断,为什么我没有用捏,因为老师要检查代码,为了更高的阅读性,我选择用传统的i和j的方式( *︾▽︾)
Status GO(int *t, int *q, TSMatrix A, TSMatrix *C) {
C->data[*q].i = A.data[*t].i;
C->data[*q].j = A.data[*t].j;
C->data[*q].e = A.data[*t].e;
(*q)++, (*t)++;
return OK;
}
Status AddTripleSMatrix(TSMatrix A, TSMatrix B, TSMatrix *C) {
//add two tripleM
int ta = 0, tb = 0, q = 0, tool;
C->mu = A.mu;
C->nu = A.nu;
// if(B.mu > C->mu) {
// C->mu = B.mu;
// }
// if(B.nu > C->nu) {
// C->nu = B.nu;
// }
while(ta < A.tu && tb < B.tu) {
if(A.data[ta].i == B.data[tb].i) {
if(A.data[ta].j == B.data[tb].j) {
tool = A.data[ta].e+B.data[tb].e;
if(C->data[q].e != 0) {
C->data[q].i = A.data[ta].i;
C->data[q].j = A.data[ta].j;
C->data[q].e = A.data[ta].e+B.data[tb].e;
q++;
}
ta++, tb++;
} else if(A.data[ta].j > B.data[tb].j) {
GO(&tb, &q, B, C);
} else if(A.data[ta].j < B.data[tb].j) {
GO(&ta, &q, A, C);
}
} else if(A.data[ta].i > B.data[tb].i) {
GO(&tb, &q, B, C);
} else if(A.data[ta].i < B.data[tb].i) {
GO(&ta, &q, A, C);
}
}
while(ta < A.tu) {
GO(&ta, &q, A, C);
}
while(tb < B.tu) {
GO(&tb, &q, B, C);
}
C->tu = q;
return OK;
}三元矩阵快速转置:
首先转置有个要求,三元矩阵转置后i要求从小到大排列,所以并不是简单的i = j,j = i就行了。
快速转置前,先看普通转置,知道为什么快速

这是普通转置,可以看到,就是简单的暴力搜索,用了双重循环,时间是N^2,n的平方。为了降低时间复杂度,所以有了快速转置:( ˇˍˇ )
这个呢就是书上的算法,直接上书上的原图吧。

这里讲的是什么意思呢,大致说人话就是:
用num数组存储转置后每一行有多少个数(非零元),用num数组是为了快速求出cpot数组
cpot数组存储转置后每一行第一个元素在三元表里的位置。( ‵▽′)ψ
然后再根据cpot数组,把每个元素送到三元表里对应的地方。
这样说不好理解,举个例子吧┗|*`0′*|┛ :

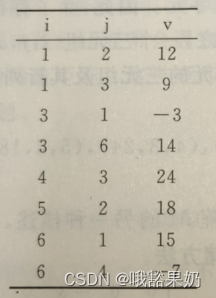
这个矩阵二维和三元长这样,转置前。
现在先处理num数组,我就遍历三元组j这一列,num数组一开始里面全是0,遍历的时候num[j]++,这样num[j]存的就是(转置前第j列)转置后第i行的非零元数量。
比如第一个j = 2,那么num[2]++;就代表j = 2行多一个数。
第二步,确定cpot数组,
cpot[0] = 0;
for(col = 1; col < Mx.nu; col++) {
cpot[col] = num[col - 1] + cpot[col - 1];
}
是的,简单的运算就行就这么简单。
第三步,根据cpot数组,把对应的元素送到合适的地方,让转置后i能从小到大排列。
具体做法是:从上到下,遍历j ,遍历到的第一个j 就是j 列的第一个数【暂停,想一下为什么就是第一个】(⊙3⊙)
以此类推第二个j 就是 j列的第二个。
举例,第一个j = 2是第一个,那么根据cpot数组能确定,j = 2,在转置后是三元组里的第几个元。当我扫描到下一个j = 2的时候,就是转置后j = 2 的第二个元。(⊙ω⊙)
以下是实现
Status TransposeSMatrix(TSMatrix Mx, TSMatrix *T) {
//TransposeSM normally
int col, num[Mx.nu], cpot[Mx.nu], t, p, q;
T->mu = Mx.nu;
T->nu = Mx.mu;
T->tu = Mx.tu;
if(T->tu) {
for(col = 0; col < Mx.nu; col++) {
num[col] = 0;
}
for(t = 0; t < Mx.tu; t++) {
num[Mx.data[t].j]++;
}
cpot[0] = 0;
for(col = 1; col < Mx.nu; col++) {
cpot[col] = num[col - 1] + cpot[col - 1];
}
for(p = 0; p < Mx.tu; p++) {
col = Mx.data[p].j;
q = cpot[col];
T->data[q].i = Mx.data[p].j;
T->data[q].j = Mx.data[p].i;
T->data[q].e = Mx.data[p].e;
cpot[col]++;
}
}
return OK;
}调试分析:
1.数组为了我们计算方便,我们是从0开始存的,但是为了我们看起来更符合数学逻辑,更美观,我们要输出i+1,这样输出就是从1开始的。
2.其他就没什么嗦的了,O__O "…
用户手册:
dos操作系统
先选择模式,输入1为测试模式,测试用例会包含所有特殊情况,可以看到结果都能正确处理。
输入2为正常模式,根据提示,输入两个矩阵的长和宽。
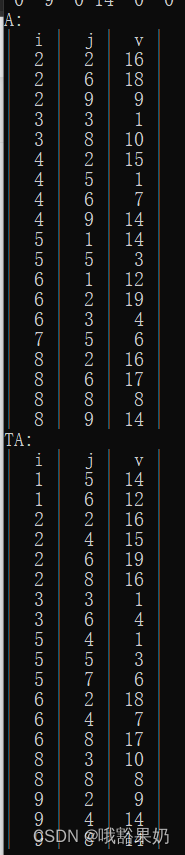
1和2模式都会输出原矩阵A,B和他的三元矩阵。AB相加得到的矩阵C和C的三元矩阵。A转置得到的矩阵TA和TA的三元矩阵。
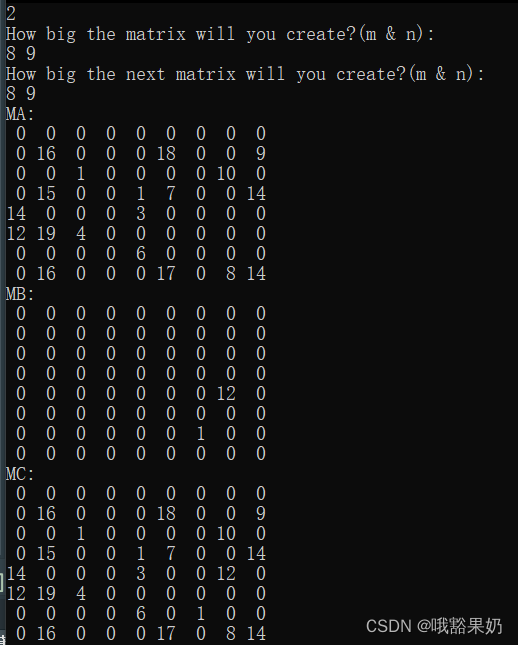
若2模式下,两矩阵A、B大小不同,则无法进行相加操作,输出数组不等大的报错。
测试结果:
输入:
1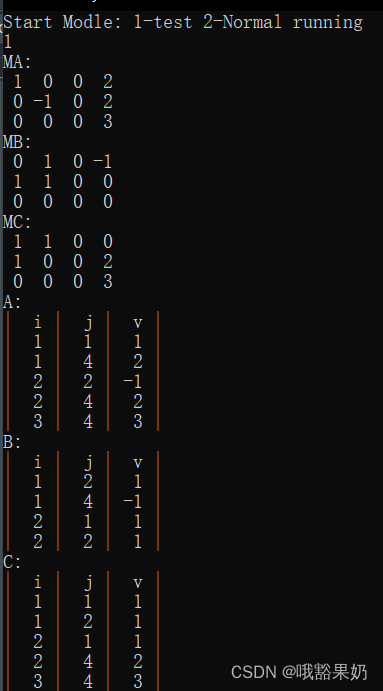

输入:
2
8 9
9 8 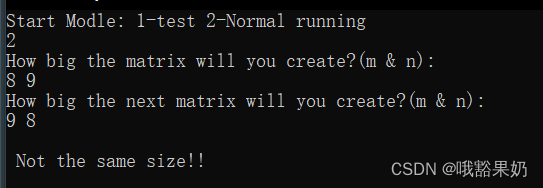
输入:
2
5 5
5 5
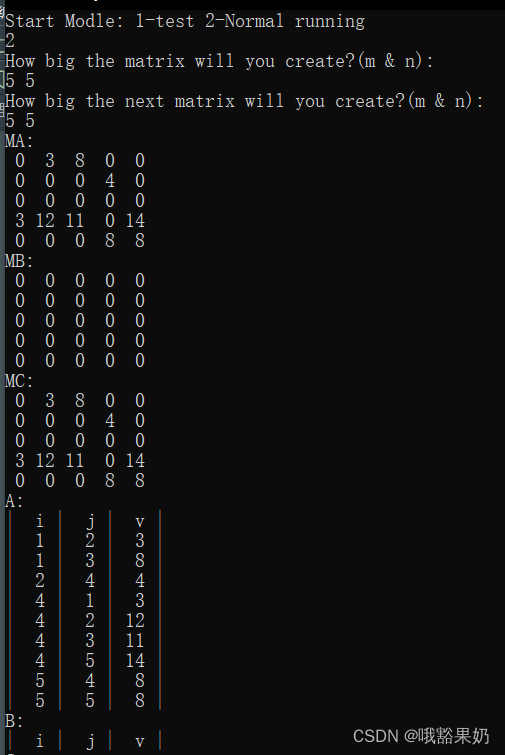
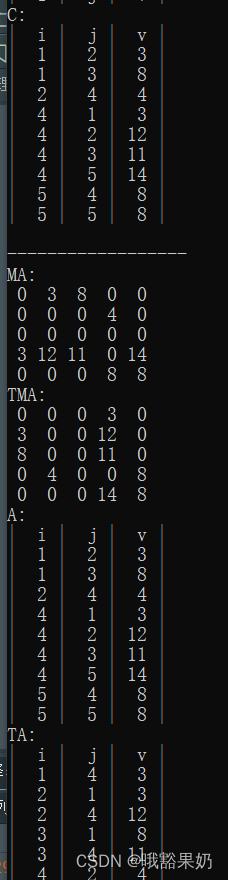
这里B的随机结果为0个非零元,比较特殊。
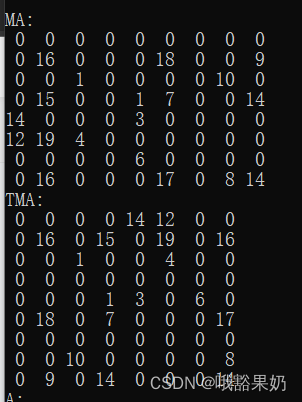
输入:
2
8 9
8 9

源代码:
主程序:
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
typedef int Status;
#define OK 1
#define ERROR 0
typedef int Elemtype;
#include "Triple.h"
#include "SparseMatrix.h"
Status RandInitSM(M *); //scan in m & n ,and Random init a sparseMatrix
Status TranslateToTM(M, TSMatrix *); //translate M to TM;
Status TranslateToM(TSMatrix, M *); //translate TM to M;
Status TransposeSMatrix(TSMatrix, TSMatrix *); //TransposeSM normally
Status AddTripleSMatrix(TSMatrix, TSMatrix, TSMatrix *); //add two tripleM
Status TestInit(M *, M *); //test init;
int main() {
M MB, MA, MC, TMA;
TSMatrix A, B, C, TA;
int chiose = 0;
printf("Start Modle: 1-test 2-Normal running\n");
scanf("%d", &chiose);
if(chiose == 1) {
TestInit(&MA, &MB);
} else if(chiose == 2) {
//Create a Sparsematrix;
printf("How big the matrix will you create?(m & n):\n");
RandInitSM(&MA);
printf("How big the next matrix will you create?(m & n):\n");
RandInitSM(&MB);
} else {
printf("\n ERROR!!\n");
return 0;
}
if(MA.m != MB.m || MA.n != MB.n) {
printf("\n Not the same size!!\n");
return 0;
}
//Make M to TM;
TranslateToTM(MA, &A);
//Make M to TM;
TranslateToTM(MB, &B);
//transposeSMatrix
TransposeSMatrix(A, &TA);
TranslateToM(TA, &TMA);
//C = A+B;
AddTripleSMatrix(A, B, &C);
//Make TM to M;
TranslateToM(C, &MC);
printf("MA:");
PrintSMatrix(MA);
printf("MB:");
PrintSMatrix(MB);
printf("MC:");
PrintSMatrix(MC);
printf("A:\n");
PrintTM(A);
printf("B:\n");
PrintTM(B);
printf("C:\n");
PrintTM(C);
printf("\n------------------\n");
printf("MA:");
PrintSMatrix(MA);
printf("TMA:");
PrintSMatrix(TMA);
printf("A:\n");
PrintTM(A);
printf("TA:\n");
PrintTM(TA);
return 0;
}
Status TestInit(M *MA, M *MB) {
//test init;
InitSMatrix(3, 4, MA);
InitSMatrix(3, 4, MB);
// A
// 1 0 0 2
// 0 -1 0 2
// 0 0 0 3
// B
// 0 1 0 -1
// 1 1 0 0
// 0 0 0 0
MA->tu = 5;
MA->D[0][0] = 1;
MA->D[0][3] = 2;
MA->D[1][1] = -1;
MA->D[1][3] = 2;
MA->D[2][3] = 3;
MB->tu = 4;
MB->D[0][1] = 1;
MB->D[0][3] = -1;
MB->D[1][0] = 1;
MB->D[1][1] = 1;
return 0;
}
Status RandInitSM(M *M) {
//scan in m & n ,and Random init a sparseMatrix
int m, n;
int randN;
int i, j, k;
srand((unsigned)time(NULL));
scanf("%d %d", &m, &n);
InitSMatrix(m, n, M);
M->tu = rand() % (m + n) * 2;
for(k = 0; k < M->tu; k++) {
i = rand() % m;
j = rand() % n;
randN = rand() % 20;
M->D[i][j] = randN;
}
return OK;
}
Status TranslateToTM(M M, TSMatrix *TM) {
//translate M to TM;
int i, j, cot = 0;
TM->mu = M.m;
TM->nu = M.n;
for(i = 0; i < M.m; i++) {
for(j = 0; j < M.n; j++) {
if(M.D[i][j] != 0) {
TM->data[cot].e = M.D[i][j];
TM->data[cot].i = i;
TM->data[cot].j = j;
cot++;
}
}
}
TM->tu = cot;
return OK;
}
Status TranslateToM(TSMatrix C, M *MC) {
//translate TM to M;
int i;
MC->m = C.mu;
MC->n = C.nu;
MC->tu = C.tu;
InitSMatrix(C.mu, C.nu, MC);
for(i = 0; i < C.tu; i++) {
MC->D[C.data[i].i][C.data[i].j] = C.data[i].e;
}
return OK;
}
Status TransposeSMatrix(TSMatrix Mx, TSMatrix *T) {
//TransposeSM normally
int col, num[Mx.nu], cpot[Mx.nu], t, p, q;
T->mu = Mx.nu;
T->nu = Mx.mu;
T->tu = Mx.tu;
if(T->tu) {
for(col = 0; col < Mx.nu; col++) {
num[col] = 0;
}
for(t = 0; t < Mx.tu; t++) {
num[Mx.data[t].j]++;
}
cpot[0] = 0;
for(col = 1; col < Mx.nu; col++) {
cpot[col] = num[col - 1] + cpot[col - 1];
}
for(p = 0; p < Mx.tu; p++) {
col = Mx.data[p].j;
q = cpot[col];
T->data[q].i = Mx.data[p].j;
T->data[q].j = Mx.data[p].i;
T->data[q].e = Mx.data[p].e;
cpot[col]++;
}
}
return OK;
}
Status GO(int *t, int *q, TSMatrix A, TSMatrix *C) {
C->data[*q].i = A.data[*t].i;
C->data[*q].j = A.data[*t].j;
C->data[*q].e = A.data[*t].e;
(*q)++, (*t)++;
return OK;
}
Status AddTripleSMatrix(TSMatrix A, TSMatrix B, TSMatrix *C) {
//add two tripleM
int ta = 0, tb = 0, q = 0, tool;
C->mu = A.mu;
C->nu = A.nu;
if(B.mu > C->mu) {
C->mu = B.mu;
}
if(B.nu > C->nu) {
C->nu = B.nu;
}
while(ta < A.tu && tb < B.tu) {
if(A.data[ta].i == B.data[tb].i) {
if(A.data[ta].j == B.data[tb].j) {
tool = A.data[ta].e+B.data[tb].e;
if(C->data[q].e != 0) {
C->data[q].i = A.data[ta].i;
C->data[q].j = A.data[ta].j;
C->data[q].e = A.data[ta].e+B.data[tb].e;
q++;
}
ta++, tb++;
} else if(A.data[ta].j > B.data[tb].j) {
GO(&tb, &q, B, C);
} else if(A.data[ta].j < B.data[tb].j) {
GO(&ta, &q, A, C);
}
} else if(A.data[ta].i > B.data[tb].i) {
GO(&tb, &q, B, C);
} else if(A.data[ta].i < B.data[tb].i) {
GO(&ta, &q, A, C);
}
}
while(ta < A.tu) {
GO(&ta, &q, A, C);
}
while(tb < B.tu) {
GO(&tb, &q, B, C);
}
C->tu = q;
return OK;
}头文件SparseMatrix.h:
#include <stdlib.h>
typedef struct {
Elemtype **D;
int m, n;
int tu;
} SparseMatrix, M;
Status InitSMatrix(int, int, M *); //Init M;
Status PrintSMatrix(M);
Status InitSMatrix(int m, int n, M *M) {
//Init M;
M->m = m;
M->n = n;
M->D = (Elemtype **)malloc(m * sizeof(Elemtype *));
for ( int i = 0; i < m; i++) {
M->D[i] = (Elemtype *)malloc(n * sizeof(Elemtype));
}
for (int i = 0; i < m; i++) {
for (int j = 0; j < n; j++) {
M->D[i][j] = 0;
}
}
if(M->D) {
return OK;
}
return ERROR;
}
Status PrintSMatrix(M M) {
int i, j;
for(i = 0; i < M.m; i++) {
printf("\n");
for(j = 0; j < M.n; j++) {
printf("%2d ", M.D[i][j]);
}
}
printf("\n");
return OK;
}头文件Triple.h:
#define MAXSIZE 12500
typedef struct {
int i, j;
Elemtype e;
} Triple;
typedef struct {
Triple data[MAXSIZE + 1];
int mu, nu, tu;
} TSMatrix;
Status PrintTM(TSMatrix);
Status PrintTM(TSMatrix TM) {
int i;
printf("| i | j | v |\n");
for(i = 0; i < TM.tu; i++) {
printf("| %2d | %2d | %2d |\n", TM.data[i].i + 1, TM.data[i].j + 1, TM.data[i].e);
}
return OK;
}总结:
可以看到两个头文件里其实没什么东西,因为上机实验要展示的东西太多了,也就是说这道题其实不好╮(╯﹏╰)╭,就是要硬考你数据结构。
o_O???
加油↖(^ω^)↗ 一起努力。

![[附源码]java毕业设计流浪动物救助系统](https://img-blog.csdnimg.cn/a1bab4f6876447a3ac17f8f62887792a.png)


![[博士后申请]套磁信的五大误区](https://img-blog.csdnimg.cn/7dd43658f7644d87ab7101726d91da8e.jpeg)



![[Linux安装软件详解系列]04 安装Redis](https://img-blog.csdnimg.cn/1b5147db25e34d3a98d4dc31697696b4.png)