文章目录
- Reference
- 1. REINFORCE
- 1.1 Basic
- 1.2 Code
- 2. Improvement Tips
- 2.1 Assign Suitable Credit
- 2.2 Add a Baseline
- 2.3 Advantage Function
- 3. Actor-Critic(A2C)
- 3.1 Basic
- 3.2 Code
策略梯度是一种基于策略的算法,相比于DQN一类的基于价值的算法,它会直接显式的学习一个目标策略。梯度下降的基础知识可以参考之前的博客强化学习(六)策略梯度和《动手学强化学习》部分内容。
Reference
[1] 《动手学强化学习》 https://hrl.boyuai.com/
[2] David Silver: https://www.youtube.com/watch?v=KHZVXao4qXs&t=4609s
我们假设目标策略
π
θ
(
a
∣
s
)
\pi_\theta(a|s)
πθ(a∣s)是一种随机策略,并且处处可微,
θ
\theta
θ为对应参数。可以通过神经网络或线性模型对目标策略进行建模。输入某个状态,输出动作的概率分布。
(1)目标函数
我们期望获得一个最优策略,能够最大化策略在环境中的期望回报。
J
(
θ
)
=
E
[
V
π
θ
(
s
)
]
J(\theta)=E[V^{\pi_\theta}(s)]
J(θ)=E[Vπθ(s)]
根据贝尔曼方程,我们可以用Q函数表示目标函数
J
(
θ
)
=
∑
s
∈
S
d
(
s
)
∑
a
∈
A
π
θ
(
a
∣
s
)
Q
π
θ
(
s
,
a
)
J(\theta)=\sum_{s \in S} d(s) \sum_{a \in A} \pi_\theta(a|s) Q^{\pi_\theta}(s,a)
J(θ)=s∈S∑d(s)a∈A∑πθ(a∣s)Qπθ(s,a)
(2)梯度
我们希望通过梯度下降(上升)优化策略,策略梯度可以表示为
∇
θ
=
α
∇
J
(
θ
)
∇
J
(
θ
)
=
∑
s
∈
S
d
(
s
)
∑
a
∈
A
∇
π
θ
(
a
∣
s
)
Q
π
θ
(
s
,
a
)
=
E
π
θ
[
Q
π
θ
(
s
,
a
)
∇
log
π
θ
(
a
∣
s
)
]
\nabla \theta = \alpha \nabla J(\theta) \\ \nabla J(\theta) = \sum_{s \in S} d(s) \sum_{a \in A} \nabla \pi_\theta(a|s) Q^{\pi_\theta}(s,a)=E_{\pi_\theta}[Q^{\pi_\theta}(s,a) \nabla \log \pi_\theta(a|s)]
∇θ=α∇J(θ)∇J(θ)=s∈S∑d(s)a∈A∑∇πθ(a∣s)Qπθ(s,a)=Eπθ[Qπθ(s,a)∇logπθ(a∣s)]
因此我们可以将 Q π θ ( s , a ) log π θ ( a ∣ s ) Q^{\pi_\theta}(s,a) \log \pi_\theta(a|s) Qπθ(s,a)logπθ(a∣s)作为损失值反向传递优化模型。
1. REINFORCE
1.1 Basic
上文我们提到可以将
Q
π
θ
(
s
,
a
)
log
π
θ
(
a
∣
s
)
Q^{\pi_\theta}(s,a) \log \pi_\theta(a|s)
Qπθ(s,a)logπθ(a∣s)作为损失值反向传递优化模型。我们在强化学习(五)价值函数拟合中学到可以通过MC或TD近似Q或V函数。REINFORCE算法就是采用MC方法,利用轨迹的累计回报预估Q函数,所以策略梯度改变成为:
∇
θ
=
α
∇
J
(
θ
)
∇
J
(
θ
)
=
E
π
θ
[
G
t
∇
log
π
θ
(
a
∣
s
)
]
\nabla \theta = \alpha \nabla J(\theta) \\ \nabla J(\theta) =E_{\pi_\theta}[G_t \nabla \log \pi_\theta(a|s)]
∇θ=α∇J(θ)∇J(θ)=Eπθ[Gt∇logπθ(a∣s)]
其中G_t是一条完整轨迹获得的累积奖励。REINFORCE是一种在线学习方法,采样到的轨迹数据只能使用一次。同时因为使用累计回报
G
t
G_t
Gt预测Q函数,所以算法的性能有一定程度的波动(高方差)。
1.2 Code
import gym
import torch
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
from tqdm import tqdm
import rl_utils
首先定义策略网络PolicyNet,输入是某个状态,输出则是该状态下的动作概率分布。
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return F.softmax(self.fc2(x), dim=1) # dim=1,对每行使用softmax
接着定义REINFORCE算法,take_action和update是算法最重要的两个部分。在take_action中通过由PolicyNet计算获得的动作概率分布和distribution.Categorical对离散动作采样。在update中,根据与环境交互记录的轨迹计算累积回报
G
t
G_t
Gt,并将损失函数设定为
−
G
t
∇
log
π
θ
(
a
∣
s
)
-G_t \nabla \log \pi_\theta(a|s)
−Gt∇logπθ(a∣s),利用梯度下降优化模型。
class REINFORCE:
def __init__(self, state_dim, hidden_dim, action_dim,
learning_rate, gamma, device):
self.policy_net = PolicyNet(state_dim, hidden_dim,
action_dim).to(device)
self.optimizer = torch.optim.Adam(self.policy_net.parameters(),
lr=learning_rate)
self.gamma = gamma
self.device = device
# 根据动作概率分布随机采样
def take_action(self, state):
state = torch.tensor([state], dtype=torch.float).to(self.device)
probs = self.policy_net(state)
action_dist = torch.distributions.Categorical(probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict):
reward_list = transition_dict['rewards']
state_list = transition_dict['states']
action_list = transition_dict['actions']
G = 0
self.optimizer.zero_grad()
# 通过计算累积奖励G,获得梯度
for i in reversed(range(len(reward_list))):
reward = reward_list[i]
state = torch.tensor([state_list[i]],
dtype=torch.float).to(self.device)
action = torch.tensor([action_list[i]]).view(-1,1).to(self.device)
log_prob = torch.log(self.policy_net(state).gather(1,action))
G = self.gamma * G + reward
loss = -log_prob * G # 梯度上升
loss.backward()
self.optimizer.step()
问题:如何计算 log π θ ( a ∣ s ) \log \pi_\theta(a|s) logπθ(a∣s)?怎么理解log_prob = torch.log(self.policy_net(state).gather(1,action))?
定义完策略后,我们可以在车杆环境上实验:
return_list = []
for i_episode in range(num_episodes):
episode_return = 0
transition_dict = {
'states': [],
'actions': [],
'next_states': [],
'rewards': [],
'dones': []
}
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
state = next_state
episode_return += reward
return_list.append(episode_return)
# on-policy: learning from a trajectory
agent.update(transition_dict)
if (i_episode + 1) % 100 == 0:
print(f'Episode: {i_episode + 1}, return={np.mean(return_list[-100:])}')
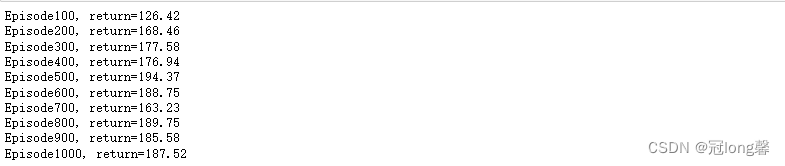
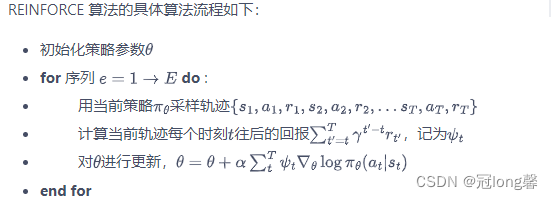
在1000次训练过程中我们发现,REINFORCE算法表现并不平稳,获得的return值时高时低。这是因为REINFORCE采用轨迹的累积回报预测Q函数具有较高的方差,因为采样轨迹差别过大而导致表现时好时坏。
训练完agent后,我们可以在实验环境中看看实际表现的效果如何
for i in range(5):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
env.render()
state = next_state
episode_return += reward
print(episode_return)
2. Improvement Tips
正如上文所述,REINFORCE是一种具有无偏、高方差、低数据使用效率特点的On-Policy方法。我们需要设计一些技巧改进这样的方法。相关内容我在强化学习算法(五)——PPO中已经学习过了,此处尝试将他们串联起来。
2.1 Assign Suitable Credit
REINFORCE中的策略梯度为
∇
J
(
θ
)
=
−
G
t
∇
log
π
θ
(
a
∣
s
)
\nabla J(\theta)=-G_t \nabla \log \pi_\theta(a|s)
∇J(θ)=−Gt∇logπθ(a∣s)
其中
∇
log
π
θ
(
a
∣
s
)
\nabla \log \pi_\theta(a|s)
∇logπθ(a∣s)表示轨迹中每个状态动作对发生概率修正的方向(梯度方向),
G
t
G_t
Gt表示每个状态动作对发生概率修正的权重(大小与方向)。因此,在同一条轨迹中的所有状态动作对修正的权重相同。
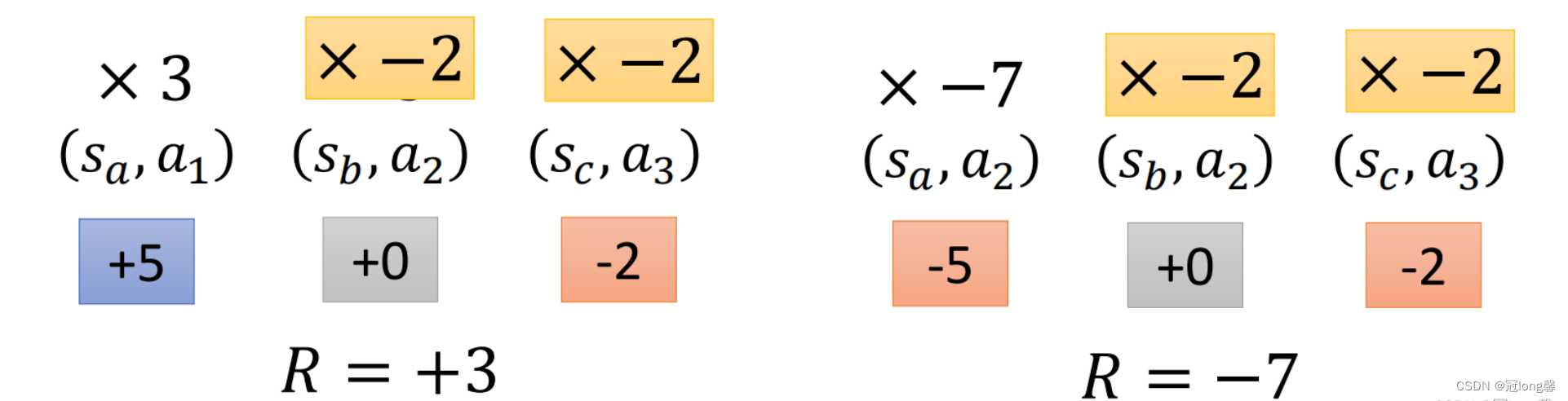
很明显我们并不期望所有状态动作对的变化程度相同,所以我们需要修改G_t。我们使用状态动作对(s,a)发生后的累积奖励
∑
t
′
=
0
T
γ
t
′
−
t
R
t
′
\sum_{t'=0}^T \gamma^{t'-t} R_{t'}
∑t′=0Tγt′−tRt′作为每个状态动作对的修正权重,从而保证了每个状态动作对修正权重的独特性。
∇
J
(
θ
)
=
−
(
∑
t
′
=
0
T
γ
t
′
−
t
R
t
′
)
∇
log
π
θ
(
a
∣
s
)
\nabla J(\theta)=- (\sum_{t'=0}^T \gamma^{t'-t} R_{t'}) \nabla \log \pi_\theta(a|s)
∇J(θ)=−(t′=0∑Tγt′−tRt′)∇logπθ(a∣s)
2.2 Add a Baseline
假设采样获得的所有状态动作对的累积奖励均大于0.在理想状态下,a, b, c三种状态动作对都被采样,状态动作的发生概率都获得了提高。但实际情况并不能保证采样到所有状态动作对,没被采样的状态动作对的发生概率不增反降。
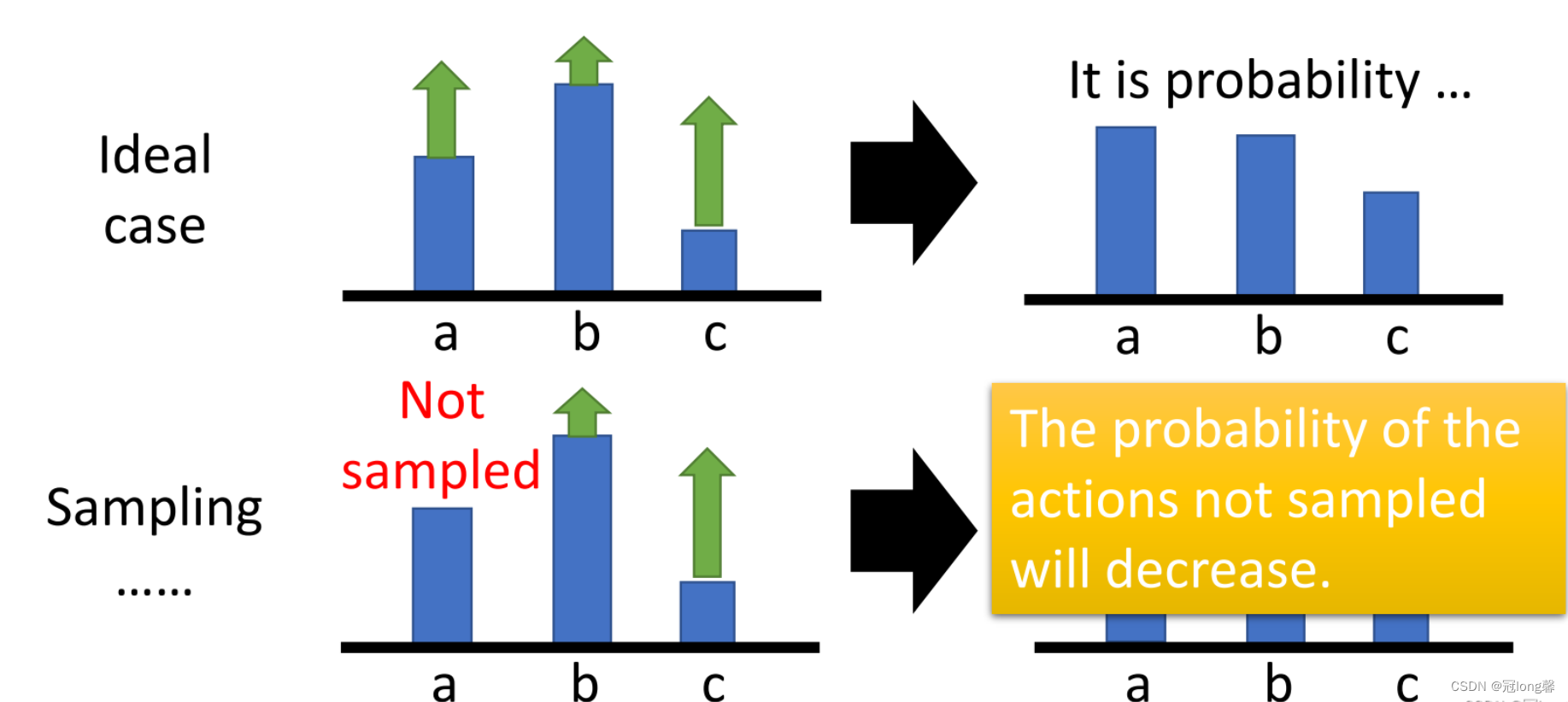
因此我们在权重部分减去baseline,即状态在当前策略下的平均奖励
b
(
s
t
)
b(s_t)
b(st)。这样改变权重将不总是为正的,低于平均奖励的状态动作对发生的概率会下降,未被采样的状态动作对的概率也不会自然下降了。Basline可以使用状态价值函数衡量
b
(
s
t
)
=
V
π
θ
(
s
t
)
b(s_t) = V^{\pi_\theta}(s_t)
b(st)=Vπθ(st)。
∇
J
(
θ
)
=
−
(
∑
t
′
=
0
T
γ
t
′
−
t
R
t
′
−
V
π
θ
(
s
t
)
)
∇
log
π
θ
(
a
∣
s
)
\nabla J(\theta)=- (\sum_{t'=0}^T \gamma^{t'-t} R_{t'}-V^{\pi_\theta}(s_t)) \nabla \log \pi_\theta(a|s) \\
∇J(θ)=−(t′=0∑Tγt′−tRt′−Vπθ(st))∇logπθ(a∣s)
根据
Q
π
θ
(
s
,
a
)
=
∑
t
′
=
0
T
γ
t
′
−
t
R
t
′
Q^{\pi_\theta}(s,a) = \sum_{t'=0}^T \gamma^{t'-t} R_{t'}
Qπθ(s,a)=∑t′=0Tγt′−tRt′我们可以获得新的策略梯度
∇
J
(
θ
)
=
−
(
Q
π
θ
(
s
t
,
a
t
)
−
V
π
θ
(
s
t
)
)
∇
log
π
θ
(
a
t
∣
s
t
)
\nabla J(\theta)=- (Q^{\pi_\theta}(s_{t},a_t)-V^{\pi_\theta}(s_t)) \nabla \log \pi_\theta(a_t|s_t)
∇J(θ)=−(Qπθ(st,at)−Vπθ(st))∇logπθ(at∣st)
2.3 Advantage Function
我们将
(
Q
π
θ
(
s
t
,
a
t
)
−
V
π
θ
(
s
t
)
)
(Q^{\pi_\theta}(s_{t},a_t)-V^{\pi_\theta}(s_t))
(Qπθ(st,at)−Vπθ(st))定义为优势函数
A
θ
(
s
t
,
a
t
)
A^\theta(s_t,a_t)
Aθ(st,at)。这样就要求我们优化两个网络:Q网络与V网络。
根据贝尔曼期望方程
Q
π
θ
(
s
t
,
a
t
)
=
E
[
R
t
+
1
+
γ
V
π
θ
(
s
′
)
]
Q^{\pi_\theta}(s_{t},a_t)=E[R_{t+1}+\gamma V^{\pi_\theta}(s')]
Qπθ(st,at)=E[Rt+1+γVπθ(s′)],我们可以使用单个V函数网络实现策略梯度计算。此时优势函数定义为
A
π
θ
(
s
t
,
a
t
)
=
r
t
+
γ
V
π
θ
(
s
′
)
−
V
π
θ
(
s
t
)
A^{\pi_\theta}(s_t,a_t) = r_t+\gamma V^{\pi_\theta}(s')-V^{\pi_\theta}(s_t)
Aπθ(st,at)=rt+γVπθ(s′)−Vπθ(st)
注意优势函数也就是TD-Target值了,使用优势函数表示的策略梯度为。
∇
J
(
θ
)
=
−
A
π
θ
(
s
t
,
a
t
)
∇
log
π
θ
(
a
t
∣
s
t
)
\nabla J(\theta)=- A^{\pi_\theta}(s_t,a_t) \nabla \log \pi_\theta(a_t|s_t)
∇J(θ)=−Aπθ(st,at)∇logπθ(at∣st)
3. Actor-Critic(A2C)
3.1 Basic
在介绍完策略梯度常用的三个技巧后,我们终于可以开始了解Actor-Critic框架了。后续的 TRPO、PPO、DDPG、SAC 等深度强化学习算法都是在 Actor-Critic 框架下进行发展的。深入了解 Actor-Critic 算法对读懂目前深度强化学习的研究热点有很大帮助。
采用2.1,2.2,2.3提到的技巧后,Actor网络的策略梯度表示为
∇
J
(
θ
)
=
−
A
π
θ
(
s
t
,
a
t
)
∇
log
π
θ
(
a
t
∣
s
t
)
A
π
θ
(
s
t
,
a
t
)
=
r
t
+
γ
V
π
θ
(
s
′
)
−
V
π
θ
(
s
t
)
\nabla J(\theta)=- A^{\pi_\theta}(s_t,a_t) \nabla \log \pi_\theta(a_t|s_t) \\ A^{\pi_\theta}(s_t,a_t) = r_t+\gamma V^{\pi_\theta}(s')-V^{\pi_\theta}(s_t)
∇J(θ)=−Aπθ(st,at)∇logπθ(at∣st)Aπθ(st,at)=rt+γVπθ(s′)−Vπθ(st)
A2C采用TD方法通过Actor与环境交互收集到的数据学习一个价值函数
V
π
θ
(
s
t
)
V^{\pi_\theta}(s_t)
Vπθ(st). Actor利用Critic学习到的价值函数优化策略网络。Critic价值网络的损失函数与梯度表示为
l
o
s
s
(
w
)
=
1
2
(
r
+
γ
V
w
(
s
t
+
1
)
−
V
w
(
s
t
)
)
2
∇
w
=
−
(
r
+
γ
V
w
(
s
t
+
1
)
−
V
w
(
s
t
)
)
∇
V
w
(
s
t
)
loss(w) = \frac{1}{2}(r + \gamma V_w(s_{t+1})-V_w(s_t))^2 \\ \nabla w = - (r + \gamma V_w(s_{t+1})-V_w(s_t)) \nabla V_w(s_t)
loss(w)=21(r+γVw(st+1)−Vw(st))2∇w=−(r+γVw(st+1)−Vw(st))∇Vw(st)
其中,损失函数可以理解为TD-Target与价值网络预测的均方误差。
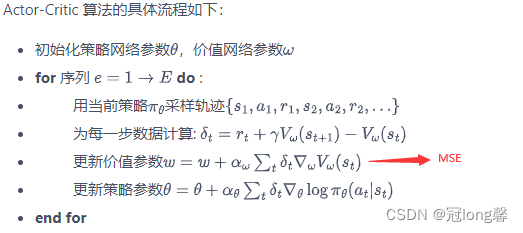
A2C相比于REINFORCE采用MC方法直接预估Q函数,A2C性能稳定,具有较小的方差。
3.2 Code
import gym
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utils
首先定义策略网络PolicyNet(同REINFORCE)用于动作选择。
class PolicyNet(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return F.softmax(self.fc2(x), dim=1) # dim=1,对每行使用softmax
接着定义价值网络ValueNet用于评估状态价值评估。
class ValueNet(nn.Module):
def __init__(self, state_dim, hidden_dim):
super(ValueNet, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
Actor-Critic由actor和critic两个网络组成,critic用于输出状态的价值,actor选择动作并根据critic提供的价值优化策略。因此动作选取与REINFORCE相同,不同点在于策略优化部分。
class ActorCritic:
def __init__(self, state_dim, hidden_dim, action_dim, actor_lr,
critic_lr, gamma, device):
self.actor = PolicyNet(state_dim, hidden_dim, action_dim).to(device)
self.critic = ValueNet(state_dim, hidden_dim).to(device)
self.actor_optimizer = torch.optim.Adam(self.actor.parameters(),
lr = actor_lr)
self.critic_optimizer = torch.optim.Adam(self.critic.parameters(),
lr = critic_lr)
self.gamma = gamma
self.device = device
# action selection,同REINFORCE
def take_action(self, state):
state = torch.tensor([state], dtype=torch.float).to(self.device)
probs = self.actor(state)
action_dist = torch.distributions.Categorical(probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'],
dtype=torch.float).to(self.device)
actions = torch.tensor(transition_dict['actions']).view(-1,1).to(self.device)
rewards = torch.tensor(transition_dict['rewards'],
dtype=torch.float).view(-1,1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'],
dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'],
dtype=torch.float).view(-1,1).to(self.device)
# TD-Target = r + v(s_{t+1})
td_target = rewards + self.gamma * self.critic(next_states) * (1-dones)
# TD-Error
td_error = td_target - self.critic(states)
log_probs = torch.log(self.actor(states).gather(1, actions))
actor_loss = torch.mean(-log_probs * td_error.detach())
critic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach()))
self.actor_optimizer.zero_grad()
self.critic_optimizer.zero_grad()
actor_loss.backward()
critic_loss.backward()
self.actor_optimizer.step()
self.critic_optimizer.step()
根据策略梯度与价值函数损失优化策略和价值网络。
问题:如何计算 log π θ ( a ∣ s ) \log \pi_\theta(a|s) logπθ(a∣s)?怎么理解log_prob = torch.log(self.policy_net(state).gather(1,action))?
仍然在CartPole环境上训练测试
actor_lr = 1e-3
critic_lr = 1e-2
num_episodes = 1000
hidden_dim = 128
gamma = 0.98
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
env_name = 'CartPole-v0'
env = gym.make(env_name)
env.seed(0)
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = ActorCritic(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device)
训练部分
return_list = []
for i_episode in range(num_episodes):
episode_return = 0
transition_dict = {
'states': [],
'actions': [],
'next_states': [],
'rewards': [],
'dones': []
}
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
state = next_state
episode_return += reward
return_list.append(episode_return)
# on-policy: learning from a trajectory
agent.update(transition_dict)
if (i_episode + 1) % 100 == 0:
print(f'Episode{i_episode + 1}, return={np.mean(return_list[-100:])}')

明显的,A2C算法相对于REINFORCE的平稳性更好,训练时长缩短。
测试部分
for i in range(5):
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done, _ = env.step(action)
env.render()
state = next_state
episode_return += reward
print(episode_return)




![[深度学习] 名词解释--正则化](https://img-blog.csdnimg.cn/f46550436a4a48049d6926878fbbb316.png)