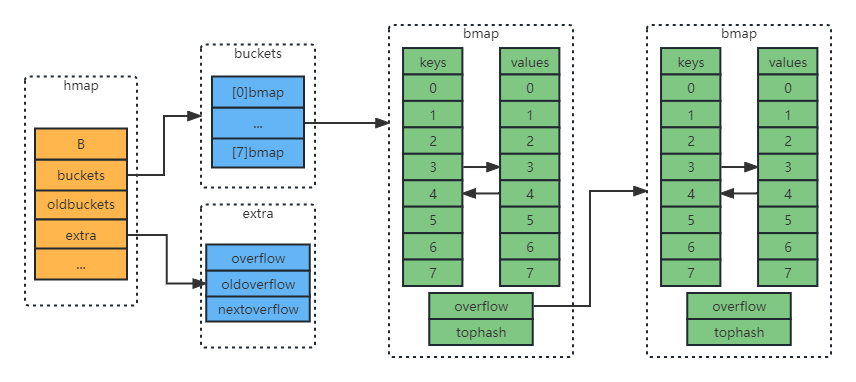
map 是一种key- value的键值对存储结构,其中key不能重复,无序。底层是hmap结构,hmap中维护buckets ( bmap结构) 。
type hmap struct {
count int
B uint8
noverflow uint16
hash0 uint32
buckets unsafe. Pointer
oldbuckets unsafe. Pointer
extra * mapextra
}
type mapextra struct {
overflow * [ ] * bmap
oldoverflow * [ ] * bmap
nextOverflow * bmap
}
type bmap struct {
tophash [ 8 ] uint8
data byte [ 1 ]
overflow * bmap
}
backet数组中的每个元素都是bmap结构( 本文都称为桶)
每个桶最多保存8 个kv对,之后使用overflow连接下一个桶( 溢出桶) 。
tophash:保存的是key值哈希值的前8 位,用作查找key的缓存,确定key是否存在
注:key、value、overflow字段都不显示定义,而是通过maptype计算偏移获取的。
哈希函数会将传入的key值进行哈希运算,得到一个唯一的值。
比如key1的hash值为:0123456789876543210
前八位hash值"01234567" 部分就叫做"高位哈希值" ,后B位hash值为"低位哈希值"
高位哈希值:是用来确定当前的桶有没有所存储的数据的
低位哈希值:是用来确定,当前的数据存在了哪个桶
根据key值算出哈希值 取低位哈希值确定在哪号桶 取高位哈希值在tophash数组中查询,确定在桶中的哪个位置 对比key完整的哈希值,如匹配获取对应的value 如没有找到,则从下个溢出桶中查找 根据key值算出哈希值 取低位哈希值确定在哪号桶 取高位哈希值在tophash数组中查询,确定在桶中的哪个位置 对比key完整的哈希值,如匹配则更新值,不匹配则新增值 如果当前桶元素已满,会通过overflow链接创建一个新的桶,来存储数据。 Go通过'与运算法' 来确定桶的位置
公式:hash ( k) & ( m- 1 ) , ( m为map 长度)
注:桶的数目需是2 的整数次幂( m的二进制数不只含一个1 ) ,否则会出现有些桶不会被选中
Go通过'拉链法' 来解决hash冲突: 线性向下
查询冲突 存放冲突 负载因子用于衡量一个哈希表冲突情况,公式为:负载因子 = 键数量 / 桶数量
哈希因子过小,说明空间利用率低 哈希因子过大,说明冲突严重,存取效率低 扩容有两种:等量扩容、2 倍扩容
负载因子 > 6.5时,也即平均每个桶存储的键值对达到6.5个 当溢出桶过多时:当B < 15 时,overflow的桶数量超过 2^B 当B >= 15 时,overflow的桶数量超过 2^15 前提条件2 :这种扩容实际上是一种整理,把后置位的数据整理到前面。这种情况下,元素会发生重排,但不会换桶。
前提条件1 :这种2 倍扩容是由于当前桶数组确实不够用了,发生这种扩容时,元素会重排,可能会发生桶迁移。
扩容刚发生时,会先将老数据存到oldbuckets里面。 每次对map进行删改操作时,会触发从oldbucket中迁移到bucket的操作【非一次性,分多次】 在扩容没有完全迁移完成之前,每次get或者put遍历数据时,都会先遍历oldbuckets,然后再遍历buckets。 优先使用互斥锁的场景:
1 复杂且频繁的数据读写操作,如:缓存数据;
2 应用中全局的共享数据,如:全局变量;
优先使用channel的场景:
1 协程之间局部传递共享数据,如:订阅发布模式;
2 统一的数据处理服务,如:库存更新+ 订单处理;
对map数据进行操作时不可取地址,扩容会变 map不会发生缩容:反复的扩容缩容会导致泄漏