1. IO模型
(1)阻塞式IO:不能操作就睡觉

(2)非阻塞式IO:不能操作就返回错误

(3)IO复用

(4)信号驱动式IO

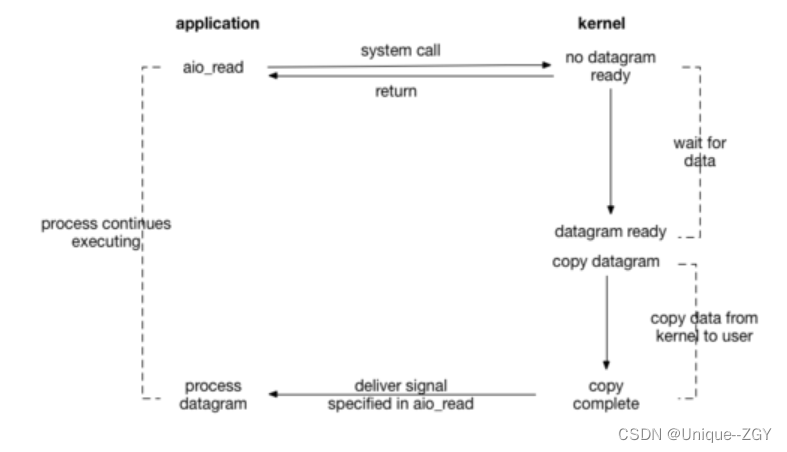
(5)异步IO
2.阻塞与非阻塞
应用层:
open时由O_NOBLOCK指示read、write是否阻塞
open以后可以由fcntl函数来改变是否阻塞:
flags = fcntl(fd,F_GETFL,0);
flags |= O_NOBLOCK; //flags &= (~O_NOBLOCK);
fcntl(fd,F_SETFL,flags);
驱动层:通过等待队列
wait_queue_head_t //等待队列头数据类型
init_waitqueue_head(wait_queue_head_t *pwq) //初始化等待队列头
wait_event_interruptible(wq,condition)
/*
功能:条件不成立则让任务进入浅度睡眠,直到条件成立醒来
wq:等待队列头
condition:C语言表达式
返回:正常唤醒返回0,信号唤醒返回非0(此时读写操作函数应返回-ERESTARTSYS)
*/
wait_event(wq,condition) //深度睡眠
wake_up_interruptible(wait_queue_head_t *pwq)
wake_up(wait_queue_head_t *pwq)
/*
1. 读、写用不同的等待队列头rq、wq
2. 无数据可读、可写时调用wait_event_interruptible(rq、wq,条件)
3. 写入数据成功时唤醒rq,读出数据成功唤醒wq
*/
驱动代码:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include "mychar.h"
#define BUF_LEN 100
int major = 11;
int minor = 0;
int mychar_num = 1;
struct mychar_dev
{
struct cdev mydev;
char mydev_buf[BUF_LEN];
int curlen;
wait_queue_head_t rq;
wait_queue_head_t wq;
};
struct mychar_dev gmydev;
int mychar_open(struct inode *pnode,struct file *pfile)
{
pfile->private_data = (void *)container_of(pnode->i_cdev,struct mychar_dev,mydev);
printk("mychar_open is called\n");
return 0;
}
int mychar_close(struct inode *pnode,struct file *pfile)
{
printk("mychar_close is called\n");
return 0;
}
ssize_t mychar_read(struct file * pfile,char __user *puser,size_t count,loff_t *p_pos)
{
struct mychar_dev *pmydev = (struct mychar_dev *)pfile->private_data;
int size = 0;
int ret = 0;
if(pmydev->curlen <= 0)
{
if(pfile->f_flags & O_NONBLOCK){
//非阻塞
printk("O_NONBLOCK NO Data Read\n");
return -1;
}else{
//阻塞
ret = wait_event_interruptible(pmydev->rq,pmydev->curlen > 0);
if(ret){
printk("wake up by signal\n");
return -ERESTARTSYS;
}
}
}
if(count > pmydev->curlen)
{
size = pmydev->curlen;
}
else
{
size = count;
}
ret = copy_to_user(puser,pmydev->mydev_buf,size);
if(ret){
printk("copy_to_user failed\n");
return -1;
}
memcpy(pmydev->mydev_buf,pmydev->mydev_buf + size,pmydev->curlen - size);
pmydev->curlen -= size;
wake_up_interruptible(&pmydev->wq);
return size;
}
ssize_t mychar_write(struct file * pfile,const char __user *puser,size_t count,loff_t *p_pos)
{
struct mychar_dev *pmydev = (struct mychar_dev *)pfile->private_data;
int size = 0;
int ret = 0;
if(pmydev->curlen >= BUF_LEN){
if(pfile->f_flags & O_NONBLOCK){
//非阻塞
printk("O_NONBLOCK can not write data");
return -1;
}else{
//阻塞
ret = wait_event_interruptible(pmydev->wq,pmydev->curlen < BUF_LEN);
if(ret){
printk("wake up by signal\n");
return -ERESTARTSYS;
}
}
}
if(count > BUF_LEN - pmydev->curlen){
size = BUF_LEN - pmydev->curlen;
}else{
size = count;
}
ret = copy_from_user(pmydev->mydev_buf + pmydev->curlen,puser,size);
if(ret){
printk("copy_from_user failed\n");
return -1;
}
pmydev->curlen += size;
wake_up_interruptible(&pmydev->rq);
return size;
}
long mychar_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg)
{
char __user *pret = (int *)arg;
int maxlen = BUF_LEN;
int ret = 0;
struct mychar_dev *pmydev = (struct mychar_dev *)pfile->private_data;
switch(cmd)
{
case MY_CHAR_IOCTL_GET_MAXLEN:
ret = copy_to_user(pret,&maxlen,sizeof(int));
if(ret){
printk("copy_to_user maxlen falied\n");
return -1;
}
break;
case MY_CHAR_IOCTL_GET_CURLEN:
ret = copy_to_user(pret,&pmydev->curlen,sizeof(int));
if(ret){
printk("copy_to_user curlen falied\n");
return -1;
}
break;
default:
return -1;
}
return 0;
}
struct file_operations myops = {
.owner = THIS_MODULE,
.open = mychar_open,
.release = mychar_close,
.read = mychar_read,
.write = mychar_write,
.unlocked_ioctl = mychar_ioctl,
};
int __init mychar_init(void)
{
int ret = 0;
dev_t devno = MKDEV(major,minor);
/*申请设备号*/
ret = register_chrdev_region(devno,mychar_num,"mychar");
if(ret){
ret = alloc_chrdev_region(&devno,minor,mychar_num,"mychar");
if(ret){
printk("get devno failed\n");
return -1;
}
major = MAJOR(devno);
}
/*将struct cdev指定操作函数集*/
cdev_init(&gmydev.mydev,&myops);
/*将struct cdev对象添加到内核对应的数据结构里*/
gmydev.mydev.owner = THIS_MODULE;
cdev_add(&gmydev.mydev,devno,mychar_num);
init_waitqueue_head(&gmydev.rq);
init_waitqueue_head(&gmydev.wq);
return 0;
}
void __exit mychar_exit(void)
{
dev_t devno = MKDEV(major,minor);
cdev_del(&gmydev.mydev);
unregister_chrdev_region(devno,mychar_num);
}
MODULE_LICENSE("GPL");
module_init(mychar_init);
module_exit(mychar_exit);
应用层代码:
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include "mychar.h"
int main(int argc,char * argv[])
{
int ret = 0;
int fd = -1;
char buf[8]="";
int max = 0;
int cur = 0;
if(argc < 2){
printf("the arguement is too few\n");
return 1;
}
fd = open(argv[1],O_RDWR|O_NONBLOCK);
if(fd < 0){
printf("open %s failed\n",argv[1]);
return 2;
}
ret = read(fd,buf,8);
if(ret < 0){
printf("read data failed\n");
}else{
printf("buf = %s\n",buf);
}
close(fd);
return 0;
}
3.多路复用
描述符:
- 文件描述符:设备文件、管道文件
- socket描述符
3.1 应用层:三套接口select、poll、epoll
select:位运算实现 监控的描述符数量有限,效率差
poll:链表实现 监控的描述符数量不限 ,效率差
epoll: 效率最差 监控的描述符数量不限
int select(int nfds, fd_set *readfds, fd_set *writefds,fd_set *exceptfds, struct timeval *timeout);
/* 功能:监听多个描述符,阻塞等待有一个或者多个文件描述符,准备就绪。
内核将没有准备就绪的文件描述符,从集合中清掉了。
参数: nfds 最大文件描述符数 ,加1
readfds 读文件描述符集合
writefds 写文件描述符集合
exceptfds 其他异常的文件描述符集合
timeout 超时时间(NULL)
返回值:当timeout为NULL时返回0,成功:准备好的文件描述的个数 出错:-1
当timeout不为NULL时,如超时设置为0,则select为非阻塞,超时设置 > 0,则无描述符可被操作的情况下阻塞指定长度的时间
*/
void FD_CLR(int fd, fd_set *set);
//功能:将fd 从集合中清除掉
int FD_ISSET(int fd, fd_set *set);
//功能:判断fd 是否存在于集合中
void FD_SET(int fd, fd_set *set);
//功能:将fd 添加到集合中
void FD_ZERO(fd_set *set);
//功能:将集合清零
//使用模型:
while(1)
{
/*得到最大的描述符maxfd*/
/*FD_ZERO清空描述符集合*/
/*将被监控描述符加到相应集合rfds里 FD_SET*/
/*设置超时*/
ret = select(maxfd+1,&rfds,&wfds,NULL,NULL);
if(ret < 0)
{
if(errno == EINTR)//错误时信号引起的
{
continue;
}
else
{
break;
}
}
else if(ret == 0)
{//超时
//.....
}
else
{ //> 0 ret为可被操作的描述符个数
if(FD_ISSET(fd1,&rfds))
{//读数据
//....
}
if(FD_ISSET(fd2,&rfds))
{//读数据
//....
}
///.....
if(FD_ISSET(fd1,&wfds))
{//写数据
//....
}
}
}
3.2 驱动层:实现poll函数
void poll_wait(struct file * filp, wait_queue_head_t * wait_address, poll_table *p);
/*功能:将等待队列头添加至poll_table表中
参数:struct file :设备文件
Wait_queue_head_t :等待队列头
Poll_table :poll_table表
*/
/*该函数与select、poll、epoll_wait函数相对应,协助这些多路监控函数判断本设备是否有数据可读写*/
unsigned int xxx_poll(struct file *filp, poll_table *wait) //函数名初始化给struct file_operations的成员.poll
{
unsigned int mask = 0;
/*
1. 将所有等待队列头加入poll_table表中
2. 判断是否可读,如可读则mask |= POLLIN | POLLRDNORM;
3. 判断是否可写,如可写则mask |= POLLOUT | POLLWRNORM;
*/
return mask;
}
unsigned int mychar_poll(struct file *pfile,poll_table *ptb)
{
struct mychar_dev *pmydev = (struct mychar_dev *)pfile->private_data;
unsigned int mask = 0;
poll_wait(pfile,&pmydev->rq,ptb);
poll_wait(pfile,&pmydev->wq,ptb);
if(pmydev->curlen > 0){
mask |= POLLIN | POLLRDNORM;
}
if(pmydev->curlen < BUF_LEN){
mask |= POLLOUT | POLLWRNORM;
}
return mask;
}
struct file_operations myops = {
.owner = THIS_MODULE,
.open = mychar_open,
.release = mychar_close,
.read = mychar_read,
.write = mychar_write,
.unlocked_ioctl = mychar_ioctl,
.poll = mychar_poll,
};
4. 信号驱动
4.1 应用层:信号注册+ fcntl
signal(SIGIO, input_handler); //注册信号处理函数
fcntl(fd, F_SETOWN, getpid());//将描述符设置给对应进程,好由描述符获知PID
oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, oflags | FASYNC);//将该设备的IO模式设置成信号驱动模式
void input_handler(int signum)//应用自己实现的信号处理函数,在此函数中完成读写
{
//读数据
}
//应用模板
int main()
{
int fd = open("/dev/xxxx",O_RDONLY);
fcntl(fd, F_SETOWN, getpid());
oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, oflags | FASYNC);
signal(SIGIO,xxxx_handler);
//......
}
void xxxx_handle(int signo)
{//读写数据
}
4.2 驱动层:实现fasync函数
/*设备结构中添加如下成员*/
struct fasync_struct *pasync_obj;
/*应用调用fcntl设置FASYNC时调用该函数产生异步通知结构对象,并将其地址设置到设备结构成员中*/
static int hello_fasync(int fd, struct file *filp, int mode) //函数名初始化给struct file_operations的成员.fasync
{
struct hello_device *dev = filp->private_data;
return fasync_helper(fd, filp, mode, &dev->pasync_obj);
}
/*写函数中有数据可读时向应用层发信号*/
if (dev->pasync_obj)
kill_fasync(&dev->pasync_obj, SIGIO, POLL_IN);
/*release函数中释放异步通知结构对象*/
if (dev->pasync_obj)
fasync_helper(-1, filp, 0, &dev->pasync_obj);
int fasync_helper(int fd, struct file *filp, int mode, struct fasync_struct **pp);
/*
功能:产生或释放异步通知结构对象
参数:
返回值:成功为>=0,失败负数
*/
void kill_fasync(struct fasync_struct **, int, int);
/*
功能:发信号
参数:
struct fasync_struct ** 指向保存异步通知结构地址的指针
int 信号 SIGIO/SIGKILL/SIGCHLD/SIGCONT/SIGSTOP
int 读写信息POLLIN、POLLOUT
*/








![Java高效率复习-SpringMVC[SpringMVC]](https://img-blog.csdnimg.cn/eefd6995fed541f0830eb0e2f48cdbe1.png)