参考:2021-06-23 基于AprilTag的位姿估计,原理,完整代码(相机坐标系、世界坐标系) - 简书
Apriltag使用之二:方位估计(定位)_arczee的博客-CSDN博客_apriltag位姿估计
1.AprilTag概述
AprilTag是一种视觉基准系统,类似的视觉基准标签还有:ArUco、ARTag、TopoTag等。而AprilTag因其对旋转、光照、模糊具有良好的鲁棒性,因此被广泛应用于目标跟踪、室内定位、增强现实等领域。本文主要展示使用AprilTag标签,分别获取AprilTag标签在相机坐标系下和世界坐标系下位置。
生成AprilTag不同家族标签图像教程
2.AprilTag 相关资料
AprilTag论文三部曲:
-
AprilTag: A robust and flexible visual fiducial system. --2011
-
AprilTag 2: Efficient and robust fiducial detection. --2016
-
Flexible Layouts for Fiducial Tags. --2019(AprilTag3)
一些应用AprilTag的论文:
- UAV Autonomous Landing Technology Based on AprilTags Vision Positioning Algorithm.
- Pose Estimation for Multicopters Based on Monocular Vision and AprilTag.
- Image Digital Zoom Based Single Target Apriltag Recognition Algorithm in Large Scale Changes on the Distance.
上述资料打包下载地址:https://cloud.189.cn/web/share?code=JRJRJbNfe2ay(访问码:7l96)
AprilTag论文源码地址:https://github.com/AprilRobotics/apriltag
3.AprilTag 原理
检测标签
-
检测线
-
检测矩形(基于深度优先搜索
-
单应性变换与外参估计
-
外参估计
-
建立两种阈值模型(超过该阈值即认为”1“,少于该阈值即认为是”0“),一种基于“黑色”像素强度的空间变化,一种基于“白色“像素强度的空间变化模型:
-
该模型有四个参数,能用最小二乘回归求解。最后阈值大小由两种模型预测的平均值取得。根据不同黑白色块解码标签得到不同的码型,将解码得到的码型与储存在本地的码型库相对比,排除其它码型的干扰,判断是否为正确的标签。
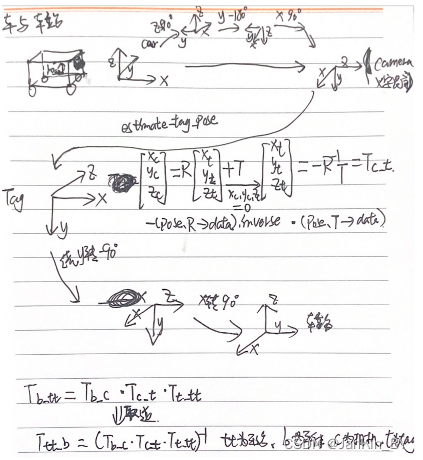
解算位姿
现在我们已知了由世界坐标系至相机坐标系的旋转矩阵和平移矩阵,现在可以根据这两个矩阵,估计相机在世界坐标系下的位置和相机坐标系下标签的位置。
1. 相机在世界坐标系下的位置
根据相机坐标系与世界坐标系之间的关系可知:
因为相机在相机坐标系下的坐标为,因此可得:
4.为ApriTag论文源码 opencv_demo.cc 添加位姿估计的代码
运行环境
Ubuntu 18.04
Opencv 3.14
IDE: Clion
推荐在Linux环境下,先安装基于C++的OpenCV lib,再编译执行下列代码。
/*调试经验:
1.相机位姿的精度主要取决于tag四个角点的检测像素精度。根据以前测试经验,存在角点误检,导致位姿误差大。主要有两种情况:
一、运动(特别是转弯)过程中照片有点模糊
二、相机与tag存在较大的倾角(30度以外误差比较大)
三、距离越远,误差越大,2m以外谨慎使用。
可能还要其他情况导致误检。
另外相机的内参也会影响计算的位姿,一定要标定好相机内参(重投影误差<0.15),做好畸变校正。
故需要加入严格的判断,最好让相机是正对mark。
*/
#include "tag_station_detection.hpp"
CREATE_LOGex(TagStationDetectionTask);
TagStationDetection::TagStationDetection()
{
td_ = apriltag_detector_create();
tf_ = tag36h11_create();
// apriltag_detector_add_family(td_, tf_);
apriltag_detector_add_family_bits(td_, tf_, 3);
td_->quad_decimate = 1.0; // Decimate input image by factor //降低图片分辨率,经实验该参数可大幅提升检测时间且不影响检测结果
td_->quad_sigma = 0; // No blur //高斯降噪,如果噪声较大的图片,可使用该参数
td_->nthreads = 2; // 2 treads provided //使用几个线程来运行
td_->debug = 0; // No debuging output
td_->refine_edges = 1;
info_.tagsize = APRILTAG_DETECTED_SIZE;
cv::Mat K, D;
if (HIGH_RESOLUTION)
{
K = (cv::Mat_<double>(3, 3) << 471.33715, 0.0, 437.19435, 0.0, 472.0701, 275.1862, 0.0, 0.0, 1.0);
D = (cv::Mat_<double>(5, 1) << -0.305921, 0.060122, -0.000640, 0.001716, 0.000000);
}
else
{
// K = (cv::Mat_<double>(3, 3) << 343.029387, 0.0, 320.552669, 0.0, 342.238068, 200.402539, 0.0, 0.0, 1.0);
// D = (cv::Mat_<double>(5, 1) << -0.343152, 0.095372, -0.003143, -0.001278, 0.000000);
K = (cv::Mat_<double>(3, 3) << 319.1774094207188, 0.0, 315.9695951747343, 0.0, 319.5137994758127, 199.07306955419622, 0.0, 0.0, 1.0);
D = (cv::Mat_<double>(5, 1) << -0.3204769598908819, 0.07196729379479753, -0.0019994529282904004, 0.0008377275431221735, 0.0);
}
cv::Size img_size(img_width_, img_height_);
initUndistortRectifyMap(K, D, cv::Mat(), K, img_size, CV_16SC2, map1_, map2_);//图片去畸变
cv::Mat new_camera_matric = cv::getOptimalNewCameraMatrix(K, D, img_size, 1);
cv::initUndistortRectifyMap(K, D, cv::Mat(), new_camera_matric, img_size, CV_16SC2, map1_, map2_);
if (TAG_IMG_UNDISTORT)
K = new_camera_matric;
info_.fx = K.at<double>(0, 0);
info_.fy = K.at<double>(1, 1);
info_.cx = K.at<double>(0, 2);
info_.cy = K.at<double>(1, 2);
Eigen::Vector3d ea_cam_slope(0, 0, -37.0 / 180 * CV_PI);
// Eigen::Vector3d ea_cam_slope(0, 0, 0.0 / 180 * CV_PI);
//绕不同轴进行旋转 旋转相机 ZYX 相机变换
rot_cam_slope_ = Eigen::AngleAxisd(ea_cam_slope[0], Eigen::Vector3d::UnitZ()) * //默认为单位矩阵,绕z轴旋转0度,结果为单位矩阵
Eigen::AngleAxisd(ea_cam_slope[1], Eigen::Vector3d::UnitY()) * //绕y轴旋转0弧度,结果不变
Eigen::AngleAxisd(ea_cam_slope[2], Eigen::Vector3d::UnitX()); //绕x轴旋转-37/180×pi弧度 绕x轴右乘
//绕z轴旋转90度,绕y轴旋转-180 绕x轴旋转90,在z方向向上平移 0.1m
Eigen::Quaterniond quat_b_c(0.5, -0.5, 0.5, -0.5); //w,x,y,z,四元数4×1 90 -180 90 -0.5i+0.5j-0.5k+0.5
Eigen::Matrix3d rot_mat_b_c;
rot_mat_b_c = quat_b_c.toRotationMatrix();//四元数转矩阵
Eigen::Translation3d trans_b_c(0.0, 0.0, 0.1);
Tb_c_ = trans_b_c * rot_mat_b_c;
//绕z轴旋转0度,绕y轴旋转-90度,绕x轴旋转90度,平移0
Eigen::Quaterniond quat_t_tt(0.5, 0.5, -0.5, 0.5); // w,x,y,z
Eigen::Matrix3d rot_mat_t_tt = quat_t_tt.toRotationMatrix();
Eigen::Translation3d trans_t_tt(0, 0, 0);
Tt_tt_ = trans_t_tt * rot_mat_t_tt;
//不进行旋转,在x负方向平移-0.21米
Eigen::Quaterniond quat_car(1, 0, 0, 0); // w,x,y,z
Eigen::Matrix3d rot_car = quat_car.toRotationMatrix();
Eigen::Translation3d trans_car(-0.21, 0, 0);
T_car_ = trans_car * rot_car;
}
TagStationDetection::~TagStationDetection()
{
}
bool TagStationDetection::OpenCam(int cam_id)
{
LINFO(TagStationDetectionTask, "Enabling video capture");
cap_ = cv::VideoCapture(cam_id);
cap_.set(cv::CAP_PROP_FRAME_WIDTH, img_width_);
cap_.set(cv::CAP_PROP_FRAME_HEIGHT, img_height_);
cv::TickMeter meter;
meter.start();
if (!cap_.isOpened())
{
LERROR(TagStationDetectionTask, "Couldn't open video capture device");
return false;
}
else
{
meter.stop();
LINFO(TagStationDetectionTask,
"Detector initialized in " << meter.getTimeSec() << "s"
<< ", " << cap_.get(cv::CAP_PROP_FRAME_WIDTH)
<< "x" << cap_.get(cv::CAP_PROP_FRAME_HEIGHT)
<< " @" << cap_.get(cv::CAP_PROP_FPS) << "FPS");
meter.reset();
return true;
}
}
void TagStationDetection::ReleaseCam()
{
cap_.release();
cv::destroyAllWindows();
}
bool TagStationDetection::OpenVideo(const std::string &video_name)
{
cap_.open(video_name.c_str());
if (!cap_.isOpened())
{
std::cerr << "Couldn't open video " << video_name.c_str() << std::endl;
return false;
}
else
return true;
}
bool TagStationDetection::DetectCamFrameTag(TagPose &tag_pose)
{
bool if_found = false;
cap_ >> frame_;
if (frame_.empty())
return if_found;
if (TAG_IMG_UNDISTORT)
{
cv::Mat UndistortImage;
remap(frame_, UndistortImage, map1_, map2_, cv::INTER_LINEAR);//去畸变
frame_ = UndistortImage;
}
cvtColor(frame_, gray_, cv::COLOR_BGR2GRAY);
image_u8_t im = {.width = gray_.cols,
.height = gray_.rows,
.stride = gray_.cols,
.buf = gray_.data};//转为apriltag库的格式
zarray_t *detections = apriltag_detector_detect(td_, &im);//检测tag
/*typedef struct apriltag_detection apriltag_detection_t;
struct apriltag_detection
{
apriltag_family_t *family;
int id;//tag的id
int hamming;
float decision_margin;
matd_t *H; //代表从(-1,1), (1,1), (1,-1),(-1,-1)转到像素坐标
double c[2]; //tag中心点在像素坐标下的坐标
double p[4][2]; //像素坐标下的坐标,4个点从左下角开始逆时针旋转
};*/
for (int i = 0; i < zarray_size(detections); i++)
{
apriltag_detection_t *det;
zarray_get(detections, i, &det);
if (det->id == 0)//第0个tag
{
if (det->decision_margin > 50.0)
{
if_found = true;
info_.det = det;
apriltag_pose_t pose;
// pose origin : center of tag
//使用apriltag自带的库求解。这就会涉及库的坐标系和我们的坐标系转换
/*apriltag_detection_info_t tag_info;
tag_info.cx=cameraParam.m_cx;
tag_info.cy=cameraParam.m_cy;
tag_info.fx=cameraParam.m_fx;
tag_info.fy=cameraParam.m_fy;
tag_info.tagsize=find_mark.length;
tag_info.det=det;
apriltag_pose_t pose;
estimate_tag_pose(&tag_info, &pose);
Vector3d ori_relative_P;
Matrix3d ori_rotation_matrix3d;
memcpy(&ori_relative_P, pose.t->data, sizeof(Vector3d));
memcpy(&ori_rotation_matrix3d, pose.R->data, sizeof(Matrix3d));*/
double err = estimate_tag_pose(&info_, &pose);
CalculatePose(pose, tag_pose);
if (APRILTAG_DETECTED_IMG_VISUALIZATION)
DetectedVisualization(det);
}
break;
}
else
continue;
}
if (not if_found)
{
if (APRILTAG_DETECTED_IMG_VISUALIZATION)
DetectedVisualization();
}
apriltag_detections_destroy(detections);
return if_found;
}
bool TagStationDetection::DetectImg(const std::string &img_name, TagPose &tag_pose)
{
bool if_found = false;
cv::Mat imge_raw = cv::imread(img_name.c_str());
if (TAG_IMG_UNDISTORT)
{
cv::Mat UndistortImage;
remap(imge_raw, UndistortImage, map1_, map2_, cv::INTER_LINEAR);
// cv::imwrite("UndistortImage.png", UndistortImage);
frame_ = UndistortImage;
}
else
frame_ = imge_raw;
cvtColor(frame_, gray_, cv::COLOR_BGR2GRAY);
image_u8_t im = {.width = gray_.cols,
.height = gray_.rows,
.stride = gray_.cols,
.buf = gray_.data};
zarray_t *detections = apriltag_detector_detect(td_, &im);
for (int i = 0; i < zarray_size(detections); i++)
{
apriltag_detection_t *det;
zarray_get(detections, i, &det);
if (det->id == 0)
{
if_found = true;
info_.det = det;
apriltag_pose_t pose;
double err = estimate_tag_pose(&info_, &pose);
CalculatePose(pose, tag_pose);
if (APRILTAG_DETECTED_IMG_VISUALIZATION)
DetectedVisualization(det, 1);
break;
}
else
continue;
}
if (not if_found)
LWARN(TagStationDetectionTask, "No effective tag detected");
apriltag_detections_destroy(detections);
return if_found;
}
void TagStationDetection::DetectedVisualization(apriltag_detection_t *det, int d)
{
line(frame_, cv::Point(det->p[0][0], det->p[0][1]),
cv::Point(det->p[1][0], det->p[1][1]),
cv::Scalar(0, 0xff, 0), 2);
line(frame_, cv::Point(det->p[0][0], det->p[0][1]),
cv::Point(det->p[3][0], det->p[3][1]),
cv::Scalar(0, 0, 0xff), 2);
line(frame_, cv::Point(det->p[1][0], det->p[1][1]),
cv::Point(det->p[2][0], det->p[2][1]),
cv::Scalar(0xff, 0, 0), 2);
line(frame_, cv::Point(det->p[2][0], det->p[2][1]),
cv::Point(det->p[3][0], det->p[3][1]),
cv::Scalar(0xff, 0, 0), 2);
std::cout << "pixel coord: (" << det->p[0][0] << ", " << det->p[0][1] << "); "
<< " (" << det->p[1][0] << ", " << det->p[1][1] << ")" << std::endl;
std::stringstream ss;
ss << det->id;
cv::String text = ss.str();
int fontface = cv::FONT_HERSHEY_SCRIPT_SIMPLEX;
double fontscale = 1.0;
int baseline;
cv::Size textsize = cv::getTextSize(text, fontface, fontscale, 2,
&baseline);
putText(frame_, text, cv::Point(det->c[0] - textsize.width / 2, det->c[1] + textsize.height / 2),
fontface, fontscale, cv::Scalar(0xff, 0x99, 0), 2);
imshow("Tag Detections", frame_);
cv::waitKey(d);
}
void TagStationDetection::DetectedVisualization()
{
imshow("Tag Detections", frame_);
cv::waitKey(1);
}
void TagStationDetection::CalculatePose(const apriltag_pose_t &pose, TagPose &tag_pose)
{
// pose.R->data a matrix structure for holding double-precision values with
// data in row-major order (i.e. index = row*ncols + col).
Eigen::Matrix3d rot_mat_cam_tag = rot_cam_slope_ * (Eigen::Map<Eigen::Matrix3d>(pose.R->data).inverse());//转置
//pose.R->data tag系下camera位置 (pose.R->data).inverse()=(pose.R->data).transpose() Tt_c(-1)=Tc_t
Eigen::Vector3d trans_vector = -Eigen::Map<Eigen::Vector3d>(pose.t->data);
Eigen::Translation3d translation(trans_vector[0], trans_vector[1], trans_vector[2]);
//Translation3d是表示平移的一种形式,构造函数为Translation3d(x,y,z),它可以直接和旋转向量、四元数、旋转矩阵相乘,得到的结果为Affine3d类型
Eigen::Affine3d Tc_t = translation * rot_mat_cam_tag;//相机坐标系下tag位置 -R(-1)*T
Eigen::Affine3d T_target;
T_target.matrix() = (Tb_c_.matrix() * Tc_t.matrix() * Tt_tt_.matrix()).inverse();//计算tag坐标系下相机的位置 Tb_tt(-1)=Ttt_b
Eigen::Vector3d rpy_target = R2ypr(T_target.rotation());
tag_pose.x = T_target.matrix()(0, 3);
tag_pose.y = T_target.matrix()(1, 3);
tag_pose.yaw = rpy_target(0);
Eigen::Affine3d T_target_car;
T_target_car.matrix() = T_target.matrix() * T_car_.matrix();
tag_pose.y_car = T_target_car.matrix()(1, 3);
std::cout << "pose x,y,z,yaw: " << tag_pose.x << ", " << tag_pose.y << ", " << T_target.matrix()(2, 3) << std::endl;
}
Eigen::Vector3d TagStationDetection::R2ypr(const Eigen::Matrix3d &R)
{
Eigen::Vector3d n = R.col(0);
Eigen::Vector3d o = R.col(1);
Eigen::Vector3d a = R.col(2);
Eigen::Vector3d ypr(3);
double y = atan2(n(1), n(0));
double p = atan2(-n(2), n(0) * cos(y) + n(1) * sin(y));
double r = atan2(a(0) * sin(y) - a(1) * cos(y), -o(0) * sin(y) + o(1) * cos(y));
ypr(0) = y;
ypr(1) = p;
ypr(2) = r;
return ypr;
}
void TagStationPub::init()
{
ctx_ = zmq::context_t{1};
publisher_ = zmq::socket_t(ctx_, zmq::socket_type::pub);
publisher_.connect("tcp://127.0.0.1:5555");
}
void TagStationPub::TagPosePublish(const TagPose &tag_pose)
{
pose_2d_.data = tag_pose;
Pose2dPublish();
LINFO(TagStationDetectionTask,
"pub tag pose (x, y, yaw, y_car): " << pose_2d_.data.x << ", " << pose_2d_.data.y
<< ", " << pose_2d_.data.yaw << ". " << pose_2d_.data.y_car);
}
void TagStationPub::TagPosePublish()
{
pose_2d_.data.x = 15;
pose_2d_.data.y = 15;
pose_2d_.data.yaw = 15;
pose_2d_.data.y_car = 15;
Pose2dPublish();
LWARN(TagStationDetectionTask,
"no detection, pub: " << pose_2d_.data.x << ", " << pose_2d_.data.y
<< ", " << pose_2d_.data.yaw << ". " << pose_2d_.data.y_car);
}
void TagStationPub::Pose2dPublish()
{
publisher_.send(zmq::str_buffer("/charge_station_detection "), zmq::send_flags::sndmore);
zmq::message_t msg(sizeof(pose_2d_));
memcpy(msg.data(), pose_2d_.buffer, sizeof(pose_2d_));
publisher_.send(msg);
}apritag_vision: 充电站与apritag之间进行定位,确定车站与车之间的位置关系







![[附源码]java毕业设计咖啡销售管理系统-](https://img-blog.csdnimg.cn/8a415ff63ffb4f6cb33997f86a72fe4d.png)