- MKRTOS 全称是 Micro-Kernel Real-Time Operating System,中文名字是微内核实时操作系统。
- MKRTOS 是首款在开源的支持MCU的微内核操作系统。未来还将在MCU上支持虚拟化!!下载地址:https://gitee.com/IsYourGod/mkrtos-real
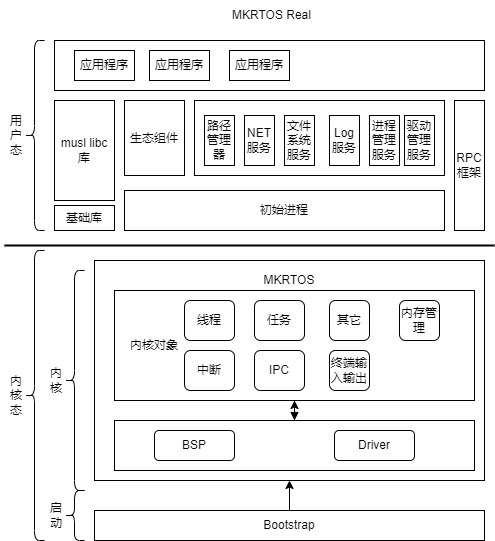
- MKRTOS被设计为一个极其精简的内核,内核只包含thread、task、内存管理等功能,其它所有功能都被实现在用户态,同时兼容 Posix 标准的操作系统,使其完全适用于各类嵌入式场合。MKRTOS架构图如下:
MKRTOS 的目标
-
- 真正的微内核设计,适用于工业控制、物联网、车载等领域。
-
- 开箱即用,支持多种平台。
-
- 移植方便快捷,内核只需2个驱动支持(串口与systick)。
-
- 具有高稳定,高抗失效设计。
-
- 简约设计,支持多进程,多线程,支持单片机。
-
- RTOS设计,高实时性。
开发背景
- 单片机被广泛的应用与工业以及物联网领域,适用于单片机的操作系统非常到,例如:rtthread,freertos这类的操作系统,但是其功能都非常的简单,使用这类 RTOS 都有着一定的学习成本(我也写过一个,可以看看 xTinyRTOS,非常简单)。开发 MKRTOS 的初衷就是兼容 POSIX,以降低学习成本,并且在开发时还考虑到内存的使用,对内存使用进行优化。Note:rtthread支持软件包,但是也存在架构设计以及拓展性方面的问题。
设计原则
- 1.服务间数据交互不经过第三方组件。
- 2.服务间最简接口原则。
- 3.内核最小功能原则。
- 4.类L4内核(第三代微内核)。
MKRTOS 内核
done
- 1.处理器:默认支持 Cortex-M3 处理器
- 2.进程间通信,采用同步通信机制,内核不缓存任何数据。
- 3.内核只需要支持systick以及串口即可启动系统。
- 4.内核采用C语言编写,并使用面向对象的编程方式,功能均被抽象为内核对象。
- 5.内核支持对象:线程对象、进程对象、工厂对象、内存管理对象、Log对象,IPC对象。
- 4.多线程:支持多线程管理,线程与task分离,设计跟合理。
- 5.多进程(MPU实现进程隔离):支持内存空间与对象空间,进程只管理资源。
- 6.irq对象支持,用于内核中断转发到用户态。
- 7.IPC功能完善。
- 8.内核futex支持(用于实现用户态的锁)。
todo
- 1.Cortex-M其它系列处理器、RISC-V,龙芯支持。
- 2.硬件浮点支持。
- 3.支持MMU实现进程隔离。
doing
MKRTOS 用户态基础支持
done
- 1.可执行文件:支持bin可执行文件。
- 2.musl libc库支持。
- 3.kconfig支持。
- 4.Fat文件系统支持
- 5.modubs支持。
doing
- 1.init进程
- 2.shell服务
- 3.path manager服务
- 4.drv 服务
- 5.Ext、LittleFs系列文件系统支持
todo
- 1.process manager服务
- 2.字符驱动、块驱动、显示驱动、网络驱动支持
MKRTOS 用户态生态
- 1.toybox常用命令支持
- 2.ota支持
- 3.ymodem支持
- 4.GUI支持。
- 5.lwip支持.
- 6.can通信协议支持。
- 7.AT协议支持。
- 8.其它。
怎么使用?
- 工程采用CMake进行管理,并在Linux下进行开发,建议使用Ubuntu18.04开发。
- GCC编译器采用gcc-arm-none-eabi-5_4-2016q3,也可以使用新版本进行开发。
- Qemu模拟STM32F2,老版本的Qemu对coretx-m3的模拟存在bug,请使用最新版本Qemu8.0及以上。 使用步骤:
- 安装CMake
sudo apt install cmake
- 安装ninja
sudo apt update
sudo apt install ninja-build
- 下载gcc
- 直接使用ubuntu命令安装的gcc arm会没有gdb,可以直接到我给定的仓库下载
https://gitee.com/IsYourGod/mkrtos-tools.git
- Qemu
- 1.Qemu可以直接下载官方的进行编译
- 2.也可以从我给定的链接下载
https://gitee.com/IsYourGod/mkrtos-tools.git
- 修改build.sh脚本中GCC路径和GCC库路径
export TOOLCHAIN=/home/zhangzheng/gcc-arm-none-eabi-5_4-2016q3/bin/
export TOOLCHAIN_LIB=/home/zhangzheng/gcc-arm-none-eabi-5_4-2016q3/lib/gcc/arm-none-eabi/5.4.1/armv7-m
- 修改run.sh 和debug.sh中qemu的路径
qemu-system-arm -machine\
netduino2 -cpu cortex-m3 \
-nographic -m size=2\
-kernel $PWD/build/output/kernel.img \
-S -gdb tcp::$1
- 执行run.sh 输出如下:
root@VM-4-4-ubuntu:/home/mkrtos-real-test/mkrtos-real# ./run.sh
st:0x20000000 re:0x3 sub:0x1000
region:[xxoooooo]
st:0x20008000 re:0xff sub:0x1000
region:[xxxxxxxx]
task alloc size is 17720, base is 0x20002000
exc_regs:8010001 20003da0 20002000
mkrtos init done..
mkrtos running..
_____ ______ ___ __ ________ _________ ________ ________
|\ _ \ _ \|\ \|\ \ |\ __ \|\___ ___\\ __ \|\ ____\
\ \ \\\__\ \ \ \ \/ /|\ \ \|\ \|___ \ \_\ \ \|\ \ \ \___|_
\ \ \\|__| \ \ \ ___ \ \ _ _\ \ \ \ \ \ \\\ \ \_____ \
\ \ \ \ \ \ \ \\ \ \ \ \\ \| \ \ \ \ \ \\\ \|____|\ \
\ \__\ \ \__\ \__\\ \__\ \__\\ _\ \ \__\ \ \_______\____\_\ \
\|__| \|__|\|__| \|__|\|__|\|__| \|__| \|_______|\_________\
\|_________|
Complie Time:Sep 16 2023 23:50:51
init..








![2023年中国羽绒制品需求现状、市场规模及细分产品规模分析[图]](https://img-blog.csdnimg.cn/img_convert/2c5266ceeb3caa72909d677679b46acd.png)