本文素材来源于北方民族大学 机电工程学院
作者:牟义达、黄瑞翔、李涛
指导老师:田国禾、张春涛
1. 总系统软件流程图
为了实现消防功能,对软件进行系统设计。根据机器人要实现的功能进行逐一设计,设计完之后再将其整合到一起,整合之后的就是总的设计,下面就是总设计的流程图。总流程图如下:
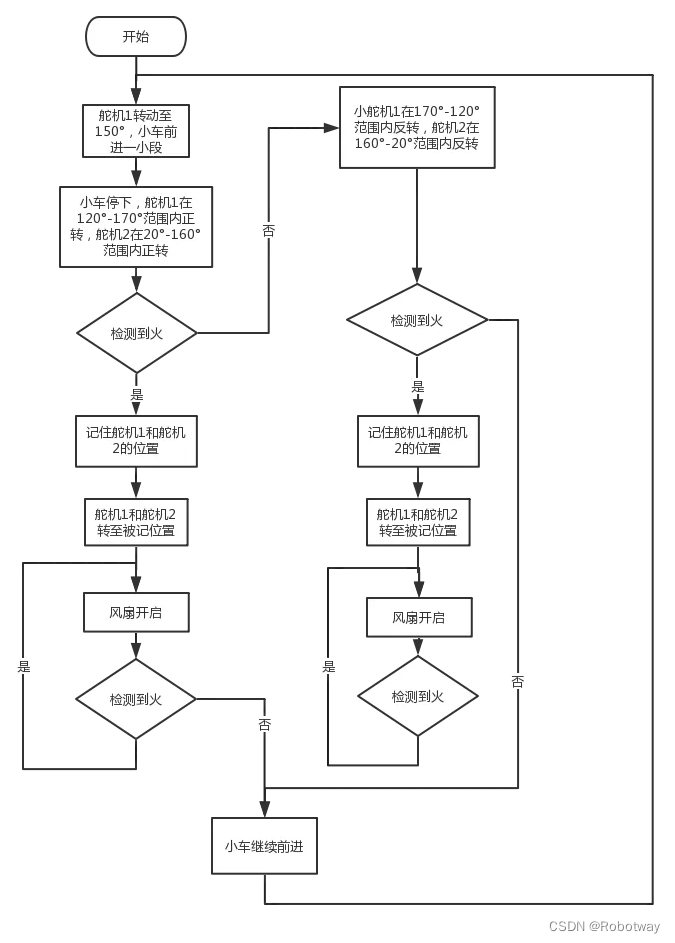
小车的整个功能流程如上图所示。小车先前行一段距离,之后停下来检测火源,若检测到火源,则记下火源的位置,然后命令灭火装置抵达火源处进行消防作业。火灭之后小车再度前行,之后再循环前面操作。
2. 各个功能的流程图
(1)机器人自主行走的流程
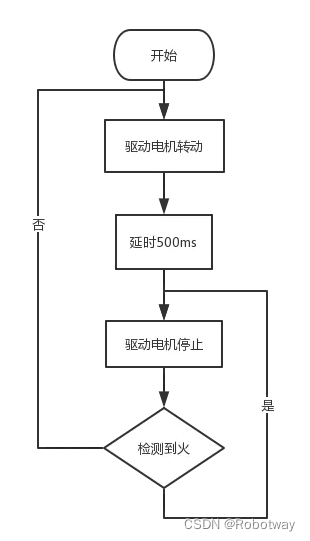
自主行走功能的实现主要是驱动电机的转动,电机附于控制板。当控制板控制电机的两个引脚电压不同且电压差达到电机的工作电压时,电机就朝一个方向转动,从而达到驱动机器人小车的目的。控制控制板对应电机的引脚电压的流程图如上,即开始时让引脚有个电压差,0.5秒后让引脚电压持平(电机停止转动),这时看检测模块的状态,若火已被检测到,则引脚电压继续持平,若火已灭则引脚会有电压差。
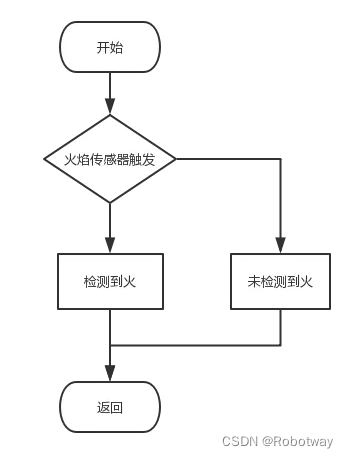
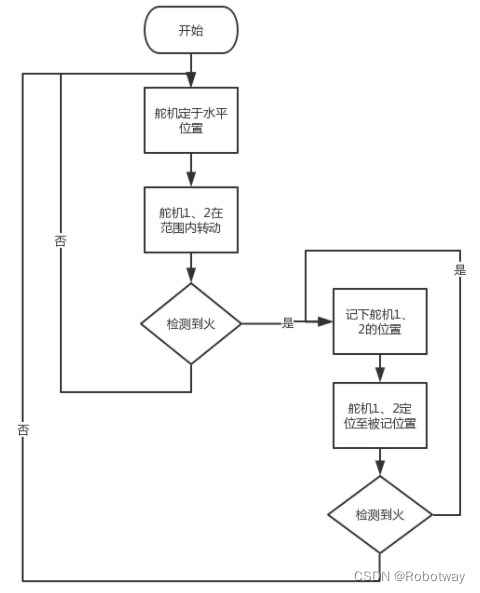
(2)检测功能的流程
检测的流程为:舵机1先定于水平位置,驱动轮驱动小车前行,小车停下时舵机1、2开始范围内摆动。因为传感器安装于舵机1、2控制的杆上,所以当舵机1、2范围内摆动时传感器可以在该范围内进行火源检测。若在该范围内检测到火时,则舵机1、2摆动完成之后会定位到火源的位置,此时灭火装置开启;灭火装置工作一段时间后再进行检测,若还能检测到火源,则舵机1、2还是保持原位并开启灭火装置提供的灭火功能。若未检测到火源,则舵机循环开始的行程。
(3)灭火功能流程
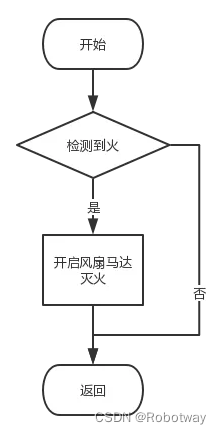
消防机器人小车的灭火流程不是很复杂,灭火装置就是由小马达和风扇叶组合而成的,当马达转动时风扇开启,所以只需控制马达的转动就能控制灭火装置的灭火功能。当检测到火时控制马达转动,当检测不到火时控制马达停止,这也就能达到控制灭火功能的要求。
关于移动消防机器人的完整内容可参考基于机器视觉的移动消防机器人
-----------------------------------------------未完待续---------------------------------------------------