对称式ICP
写在前面的话
针对于局部平面不完美的情况,提出了一种对称式ICP目标函数,相较于传统的ICP方法,增大了收敛域,提高了收敛速度。论文理论说明不甚清楚,实验较少,但代码开源。
理论
对称目标函数
在icp中对于一对对应点p,q:在点到法线的度量中:
(
p
−
q
)
⋅
n
q
(3)
(p-q) \cdot n_q\tag{3}
(p−q)⋅nq(3)
只有当局部表面是一个完美平面时上式才成立,因此提出一种标准对称式度量:
(
p
−
q
)
⋅
(
n
p
+
n
q
)
.
(4)
(p-q) \cdot\left(n_p+n_q\right) .\tag{4}
(p−q)⋅(np+nq).(4)
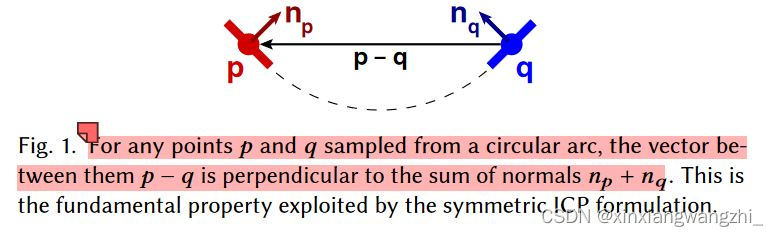
如图1所示,只要p,q位于圆弧上,此时向量(p-q)垂直于向量(np-nq),等式4恒成立。
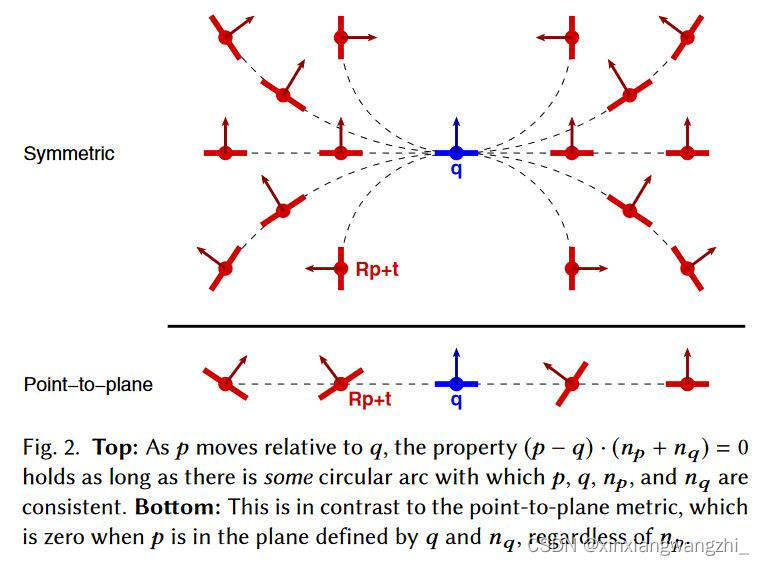
图2中,当 p 相对于 q 移动时,只要存在某个与 p、q、np 和 nq 一致的圆弧,性质 (p − q) · (np + nq ) = 0 就成立。点到面:当 p 位于 q 和 nq 定义的平面中时,无论 np 如何,点到平面度量为零。
对于等式4而言,在 3D 中也成立:只要 p 和 q 及其法线与某个圆柱体一致,方程 4 的计算结果就为零。
此外,4.1 节研究了一个不同的属性:只要 p 和 q 与位于它们之间的局部二阶曲面一致,方程 4 也成立。虽然此约束仍然为 (p, np ) 相对于 (q, nq ) 移动提供了更大的自由度,但它是比点到平面度量提供的“更有用”的自由形式。(增大了收敛域,更容易找到全局最优变换)。
对于目标函数而言,大多数先前的工作仅将刚体变换应用于其中一个表面(例如,点到面中的变换仅应用于 p),但我们考虑变换的对称形式:我们想象在一个固定的“中性”坐标中(既不在p坐标系也不在q坐标系中)评估度量,并对 P 和 Q 应用相反的变换。因此,我们可以将对称目标制定为:
E
s
y
m
m
−
R
N
=
∑
i
[
(
R
i
−
R
−
1
q
i
+
t
)
⋅
(
R
n
p
,
i
+
R
−
1
n
q
,
i
)
]
2
,
(5)
\mathcal{E}_{s y m m-R N}=\sum_i\left[\left(\mathrm{R}_i-\mathrm{R}^{-1} q_i+t\right) \cdot\left(\mathrm{R} n_{p, i}+\mathrm{R}^{-1} n_{q, i}\right)\right]^2,\tag{5}
Esymm−RN=i∑[(Ri−R−1qi+t)⋅(Rnp,i+R−1nq,i)]2,(5)
我们还探索了该目标的一个更简单的版本,其中法线不旋转。也就是说,每个点对的最小化方向保持固定,而点本身沿相反方向旋转:
E
s
y
m
m
=
∑
i
[
(
R
i
−
R
−
1
q
i
+
t
)
⋅
(
n
p
,
i
+
n
q
,
i
)
]
2
(6)
\mathcal{E}_{s y m m}=\sum_i\left[\left(\mathrm{R}_i-\mathrm{R}^{-1} q_i+t\right) \cdot\left(n_{p, i}+n_{q, i}\right)\right]^2\tag{6}
Esymm=i∑[(Ri−R−1qi+t)⋅(np,i+nq,i)]2(6)
为什么这是一个合理的简化?考虑二维中两个单位长度向量的总和。对向量应用相反的旋转可以保留它们的总和的方向,以便每个点对对目标的两个变体的贡献在一定程度上是相同的。在 3D 中,并非所有旋转轴都如此,但当 np 接近 nq 时,这一点也接近正确。 4.3 节中的实验表明,两个目标导致相似的收敛,但 Esymm 导致更简单的推导和实现。因此,本文的其余部分采用 Esymm 作为对称目标。
线性化
我们从 Rodrigues 旋转公式开始的线性化,以了解旋转 R 对向量 v 的影响:
R
v
=
v
cos
θ
+
(
a
×
v
)
sin
θ
+
a
(
a
⋅
v
)
(
1
−
cos
θ
)
(7)
\mathrm{R} v=v \cos \theta+(a \times v) \sin \theta+a(a \cdot v)(1-\cos \theta)\tag{7}
Rv=vcosθ+(a×v)sinθ+a(a⋅v)(1−cosθ)(7)
其中 a 和 θ 是旋转轴和角度。我们观察到,(7) 中的最后一项与增量旋转角 θ 成二次方,因此我们将其丢弃以进行线性化:
R
v
≈
v
cos
θ
+
(
a
×
v
)
sin
θ
=
cos
θ
(
v
+
(
a
~
×
v
)
)
,
(8)
\begin{aligned} \mathrm{R} v & \approx v \cos \theta+(a \times v) \sin \theta \\ & =\cos \theta(v+(\tilde{a} \times v)), \end{aligned}\tag{8}
Rv≈vcosθ+(a×v)sinθ=cosθ(v+(a~×v)),(8)
where
a
~
=
a
tan
θ
\tilde{a}=a \tan \theta
a~=atanθ. Substituting into (6),
E
symm
≈
∑
i
[
cos
θ
(
p
i
−
q
i
)
⋅
n
i
+
cos
θ
(
a
~
×
(
p
i
+
q
i
)
)
⋅
n
i
+
t
⋅
n
i
]
2
=
∑
i
cos
2
θ
[
(
p
i
−
q
i
)
⋅
n
i
+
(
(
p
i
+
q
i
)
×
n
i
)
⋅
a
~
+
n
i
⋅
t
~
]
2
,
(9)
\begin{aligned} \mathcal{E}_{\text {symm }} \approx & \sum_i\left[\cos \theta\left(p_i-q_i\right) \cdot n_i+\right. \\ & \left.\cos \theta\left(\tilde{a} \times\left(p_i+q_i\right)\right) \cdot n_i+t \cdot n_i\right]^2 \\ =\sum_i \cos ^2 \theta & {\left[\left(p_i-q_i\right) \cdot n_i+\right.} \\ & \left.\left(\left(p_i+q_i\right) \times n_i\right) \cdot \tilde{a}+n_i \cdot \tilde{t}\right]^2, \end{aligned}\tag{9}
Esymm ≈=i∑cos2θi∑[cosθ(pi−qi)⋅ni+cosθ(a~×(pi+qi))⋅ni+t⋅ni]2[(pi−qi)⋅ni+((pi+qi)×ni)⋅a~+ni⋅t~]2,(9)
其中
n
i
=
n
p
,
i
+
n
q
,
i
n_i=n_{p, i}+n_{q, i}
ni=np,i+nq,i and
t
~
=
t
/
cos
θ
\tilde{t}=t / \cos \theta
t~=t/cosθ。现在,我们对目标进行额外的近似加权 1/cos2 θ ,对于较小的 θ ,该值接近 1。 为了数值稳定性进一步考虑归一化,等式9变为如下形式:
∑
i
[
(
p
~
i
−
q
~
i
)
⋅
n
i
+
(
(
p
~
i
+
q
~
i
)
×
n
i
)
⋅
a
~
+
n
i
⋅
t
~
]
2
(10)
\sum_i\left[\left(\tilde{p}_i-\tilde{q}_i\right) \cdot n_i+\left(\left(\tilde{p}_i+\tilde{q}_i\right) \times n_i\right) \cdot \tilde{a}+n_i \cdot \tilde{t}\right]^2\tag{10}
i∑[(p~i−q~i)⋅ni+((p~i+q~i)×ni)⋅a~+ni⋅t~]2(10)
where
p
~
i
=
p
i
−
p
ˉ
\tilde{p}_i=p_i-\bar{p}
p~i=pi−pˉ and
q
~
i
=
q
i
−
q
ˉ
\tilde{q}_i=q_i-\bar{q}
q~i=qi−qˉ. This is a least-squares problem in
a
~
\tilde{a}
a~ and
t
~
\tilde{t}
t~, and the final transformation from
P
\mathcal{P}
P to
Q
Q
Q is:
trans
(
q
ˉ
)
∘
rot
(
θ
,
a
~
∥
a
~
∥
)
∘
trans
(
t
~
cos
θ
)
∘
rot
(
θ
,
a
~
∥
a
~
∥
)
∘
trans
(
−
p
ˉ
)
,
(11)
\operatorname{trans}(\bar{q}) \circ \operatorname{rot}\left(\theta, \frac{\tilde{a}}{\|\tilde{a}\|}\right) \circ \operatorname{trans}(\tilde{t} \cos \theta) \circ \operatorname{rot}\left(\theta, \frac{\tilde{a}}{\|\tilde{a}\|}\right) \circ \operatorname{trans}(-\bar{p}),\tag{11}
trans(qˉ)∘rot(θ,∥a~∥a~)∘trans(t~cosθ)∘rot(θ,∥a~∥a~)∘trans(−pˉ),(11)
where
θ
=
tan
−
1
∥
a
~
∥
\theta=\tan ^{-1}\|\tilde{a}\|
θ=tan−1∥a~∥.
理论到此结束,后面我会对代码进行分析测试。

![[计算机提升] 查看系统软件](https://img-blog.csdnimg.cn/78c3d0beb93d440090738c60c26d9e48.png)