黑烟车识别抓拍系统利用Python基于YOLOv5通过道路已有卡口相机对现场画面中包括黑烟车、车牌信息、车头车尾照片、林格曼黑度等级数据回传给后台。Python是一种由Guido van Rossum开发的通用编程语言,它很快就变得非常流行,主要是因为它的简单性和代码可读性。它使程序员能够用更少的代码行表达思想,而不会降低可读性。
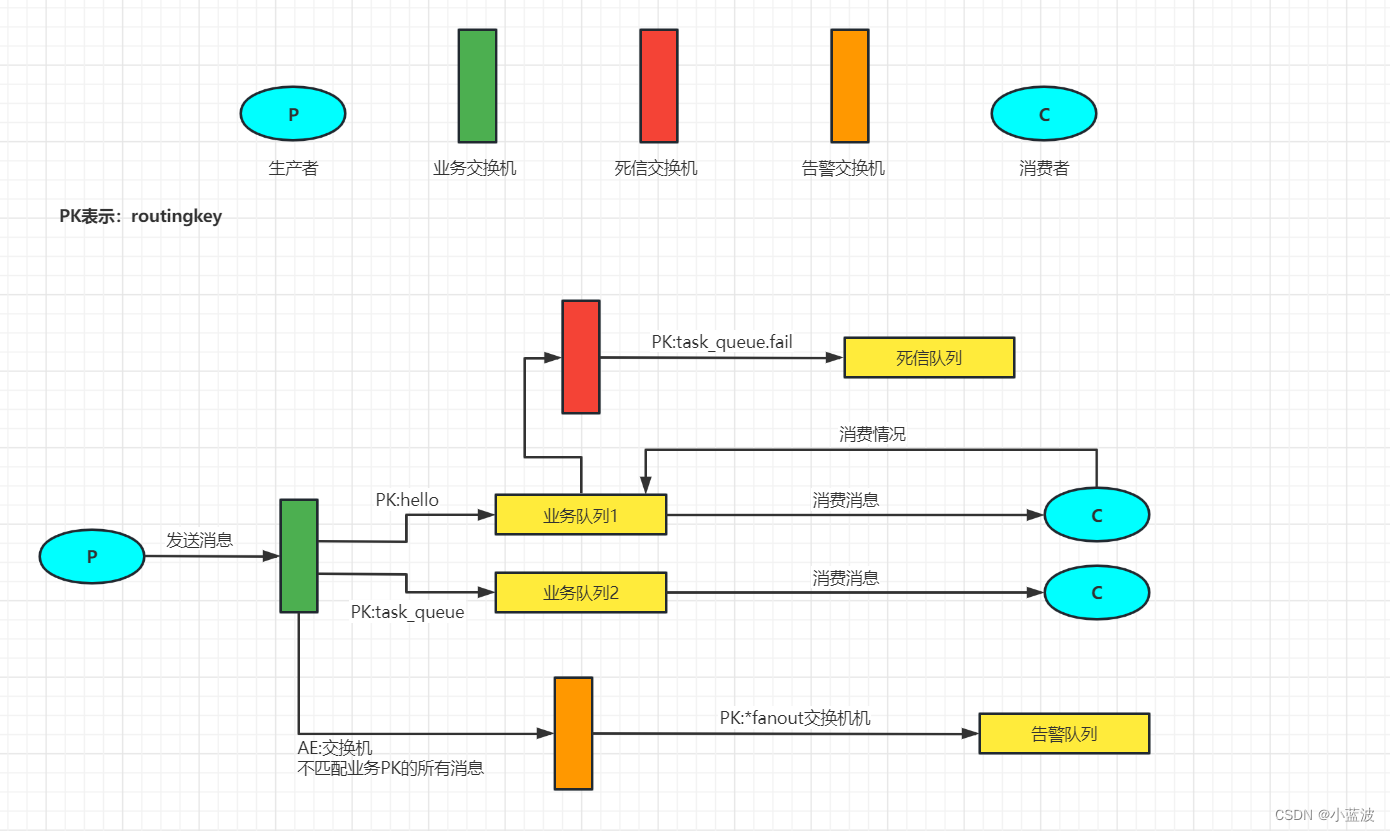
Yolo模型采用预定义预测区域的方法来完成目标检测,具体而言是将原始图像划分为 7x7=49 个网格(grid),每个网格允许预测出2个边框(bounding box,包含某个对象的矩形框),总共 49x2=98 个bounding box。我们将其理解为98个预测区,很粗略的覆盖了图片的整个区域,就在这98个预测区中进行目标检测。
YOLOv5中在训练模型阶段仍然使用了Mosaic数据增强方法,该算法是在CutMix数据增强方法的基础上改进而来的。CutMix仅仅利用了两张图片进行拼接,而Mosaic数据增强方法则采用了4张图片,并且按照随机缩放、随机裁剪和随机排布的方式进行拼接而成。这种增强方法可以将几张图片组合成一张,这样不仅可以丰富数据集的同时极大的提升网络的训练速度,而且可以降低模型的内存需求。
public abstract void registerDataSetObserver (DataSetObserver observer)
Adapter表示一个数据源,这个数据源是有可能发生变化的,比如增加了数据、删除了数据、修改了数据AdapterView相当于观察者,通过调用registerDataSetObserver方法,给Adapter注册观察者。
public abstract void unregisterDataSetObserver (DataSetObserver observer)
通过调用unregisterDataSetObserver方法,反注册观察者。
public abstract int getCount ()
返回Adapter中数据的数量。
public abstract long getItemId (int position)
获取指定position数据项的id,通常情况下会将position作为id。在Adapter中,相对来说,position使用比id使用频率更高。
public abstract boolean hasStableIds ()
hasStableIds表示当数据源发生了变化的时候,原有数据项的id会不会发生变化,如果返回true表示Id不变,返回false表示可能会变化。Android所提供的Adapter的子类(包括直接子类和间接子类)的hasStableIds方法都返回false。