大模型分布式训练
- 数据并行-Distributed Data Parallel
- 1.1 背景
- 1.2 PyTorch DDP
- 1) DDP训练流程
- 2)DistributedSampler
- 3)DataLoader: Parallelizing data loading
- 4)Data-parallel(DP)
- 5)DDP原理解析
- 2 模型并行Model Parallel
- 1)tensor parallel
- 2) Pipeline parallel
- 参考
数据并行-Distributed Data Parallel
1.1 背景
数据并行(Distributed Data Parallel)是一种用于加快深度学习模型训练速度的技术。在过去,训练大型模型往往受限于单卡训练的瓶颈,尤其是当处理大规模数据集时。数据并行通过在多个处理单元上同时训练模型,并通过增加BatchSize来提高并行度,有效地减少了训练时间。这种技术在加快深度学习模型训练速度的同时,还提高了模型处理大规模数据集的能力,为解决现实世界中的复杂问题提供了强有力的支持。
1.2 PyTorch DDP
1) DDP训练流程
这里我们通过一段代码过一下DDP的训练流
import torch
import torchvision
import argparse
# Step 1: import distributed
import torch.distributed as dist
parser = argparse.ArgumentParser()
# Step 2: torch.distributed.launchlocal_rank
parser.add_argument("--local_rank", default=-1)
FLAGS = parser.parse_args()
local_rank = FLAGS.local_rank
torch.cuda.set_device(local_rank)
# Step 3: DDP backend
dist.init_process_group(backend='nccl') # ncclgloompi
train_dataset = torchvision.datasets.CIFAR10(root='./data', train=True)
# Step 4: DistributedSamplerDataLoaderbatch_sizebatch_sizebatch_sizebatch_size)
train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset)
train_loader = torch.utils.data.DataLoader(my_trainset, batch_size=batch_size, sampler=train_sampler)
device = torch.device("cuda", local_rank)
model = nn.Linear(batch_size*32*32, 10).to(device)
# Step 5: DDP wrapper model
model = DDP(model, device_ids=[local_rank], output_device=local_rank)
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.001)
for epoch in range(num_epochs):
# Step 6: sampler epoch and shuffle
train_loader.sampler.set_epoch(epoch)
for step, (input, label) in enumerate(train_loader):
optimizer.zero_grad()
input, label = input.to(device), label.to(device)
output = model(input)
loss = loss_fn(output, label)
loss.backward()
optimizer.step()
运行测试一下
## Bash
# 5torch.distributed.launchDDP
# main.pylocal_rank":local_rank"
python -m torch.distributed.launch --nproc_per_node 4 main.py
2)DistributedSampler

Worldsize: num Hosts x num GPUs per host (= 2x3 = 6)
每个进程都知道本端的进程序号(local rank)和节点序号(host number),可以根据这一点计算全局序号(global rank)
global rank = local rank + num GPUs per host x host number

在distributed.py的源码中:
# DistributedSampler
def __iter__(self):
# deterministically shuffle based on epoch
g = torch.Generator()
g.manual_seed(self.epoch)
indices = torch.randperm(len(self.dataset), generator=g).tolist()
# add extra samples to make it evenly divisible
indices += indices[: self.total_size - len(indices))]
assert len(indices) == self.total_size
# subsample
indices = indices(self.rank:self.total_size:self.num_replicas]
assert len(indeices) == self.num_samples
print("len_indices {0}".format(len(indices)))
return iter(indices)
由于每次epoch我们都会随机shuffle数据集,
- 不同进程之间要怎么保持shuffle后数据集的一致性?
- 每次epoch怎么保证取到的数据集顺序不一样呢?
原理很简单,就是给不同进程分配数据集的不重叠、不交叉部分。
DistributedSampler使用set_epoch方法当前epoch作为随机数种子,保证每个epoch的随机数种子不一样,从而使得不同epoch下有不同的shuffle结果。
3)DataLoader: Parallelizing data loading

Dataloader在每个batch的加载过程如下:
- 从磁盘加载数据到主机(host)。
- 将数据从可页内存(pageable memory)转移到主机上的固定内存(pinnedmemory)
- 将数据从固定内存传输到GPU。
- 在GPU上运行前向(forward)和反向(backward)传递过程。
当设置多个num_workers时,多个进程同时加载数据,通过预取(prefetch)减少了IO带来的影响。
4)Data-parallel(DP)
model = torch.nn.DataParallel(model)

在旧版pytorch1.0之前使用DP实现数据并行。整个过程如图,没有主GPU。
- 从硬盘加载数据到host端页锁定内存(Page-locked Memory)。用多个工作进程实现数据并行加载。
- 把minibatch数据从页锁定内存(Page-locked Memory)并行转移到每个GPU上。不需要广播数据。每个GPU都拥有一个独立的模型拷贝,所以也不需要广播模型。
- 每个GPU进行前向计算,输出结果(Output)
- 计算loss,计算反向梯度。并利用allreduce并行计算梯度
- 更新模型参数。因为每个GPU在一开始就有独立的模型拷贝,而且梯度已经全部完成更新,也不需要模型同步。
在DP模式中,总共只有一个进程,所以存在很多缺点:
- 冗余的数据拷贝:master GPU拿到数据后需要分发给其他GPU
- 在forward之前其他GPU需要做一次模型拷贝:这是由于模型参数是在master GPU上更新的,所以要每次forward将更新好的参数同步给其他GPU
- 存在不必需要的output gather
- 不均衡的GPU利用率:master GPU占用率很高,CPU要完成数据分发,gather output,loss计算,梯度聚合以及参数更新等。
与DP相比,DDP流程明显就少了很多:
- 每个GPU基于DistributedSampler load自己的那份数据,而不像DP那样由master GPU load,然后分发给其他GPU
- master GPU不需要在做额外的那些冗余工作,GPU利用率是均衡的。通过allreduce完成梯度更新后,获得所有GPU的梯度,然后由同步后的梯度更新参数,保证参数一致性。不像DP那样master GPU完成梯度计算和参数更新,然后再同步给其他GPU
5)DDP原理解析
在使用分布式数据并行(DDP)时,我们需要处理的是模型的参数以及梯度。
DDP的核心在于同步各进程间的参数变化量,而不是直接同步参数本身。因此,确保各进程的模型状态一致性变得至关重要。模型的状态主要由模型的权重参数以及梯度组成。
也就是要关注模型的状态一致性,同时需要一个简单的逻辑构成。
Parameter和buffer
在PyTorch中,所有的模型都会继承module类。可以说,一个模型就是由一系列module组合而成的。要了解模型,就必须从module下手。
module的基本要素分为两种:1. 状态 2. 钩子(hooks)
当一个模型的网络结构被定义后,其状态就是由parameter和buffer的迭代组合表示的。当我们保存模型,调用model.state_dict()的时候,我们同时会得到模型的parameter和buffer
也就是说,在DDP中,如果我们要在不同进程中维持相同的状态,我们不光要传递parameter的梯度,也要传递buffer。事实上,DDP就是这么做的。当每次网络传播开始前,其都会把master节点上的buffer广播给其他节点,维持状态的统一。
同时再利用钩子(hooks),提供插入接口。
主程序提供的这样的钩子定义,用户实现钩子函数,而这个函数会在实际运行中插入执行。
这个在tf和早期的mxnet中经常见到,就不做赘述。
通过这一系列定义和工具,我们可以完成对模型状态的统一,也可以利用钩子函数来实现整个逻辑结构。
具体实现
第一步初始化:
| 操作 | 具体实现 |
|---|---|
| 准备环境 init_process_group | 如果进程数量不足(小于worldsize),进程会一直等待。 |
| DDP初始化model=DDP(model) | parameter和buffer从master节点传到其他节点,使得所有进程状态一致 (这一步过后不可修改模型的任何参数)。 |
| 然后根据指定的size进行分组,每一组称为一个bucket(默认25M为一组)。 | |
| 最后创建reducer管理器,给每个parameter注册平均的hook |
正式训练:
| 操作 | 具体实现 |
|---|---|
| 1. 采样数据 | 从dataloader得到一个batch的数据,用于当前计算(for input, lable in dataloader); DistributedSampler会使各个进程之间的数据不重复。 |
| 2.forward | 同步各进程状态(即各进程之间的buffer和parameters。 |
| 执行forward过程 | |
| (可选)当DDP参数find_unused_parameter为true时,其会在forward结束时,启动一个回溯,标记出所有没被用到的parameter,提前把这些设定为ready。但这个配置默认是关闭的,会影响速度 | |
| 3.backward | reducer外面:各个进程各自开始从后往前反向计算梯度,即最后面的参数反而是最先得到梯度的。 |
| reducer外面:当某个parameter的梯度计算好了的时候,其之前注册的grad hook就会被触发,在bucket里把这个parameter的状态标记为ready。 | |
| reducer里面:当某个bucket的所有parameter都是ready状态时,reducer会开始对这个bucket的所有parameter都开始一个异步的allreduce梯度平均操作。 | |
| 4.优化器optimizer应用gradient,更新参数 | 这一部分为了保证各个进程参数一直,需要确保optimizer的初始状态和每次step()时的梯度相同。这个在model初始化时就会做,因此optimeizer的初始化必须放在DDP模型创建后。如果是自己实现的optimizer,则需要自己利用接口来保证更新时的一致性。 |
2 模型并行Model Parallel
背景:数据并行下分布式训练的显存占用
早在AlexNet诞生之时就有模型并行了。
已知训练时占用显存的只有4个部分,parameters,gradients,activation和optimizer states
parameter、gradients和optimizer_states所占的显存训练全程都会存在,activation则只占用前向阶段。
由于大模型的parameters和buffer动则上百G,所以现在的模型并行,是为了保证有限显存情况下,Transformer结构大模型的训练和推理。
1)tensor parallel
tensor parallel是把层的权重(即tensor)切分到不同的 tensor parallel process group所在的rank上。
以Megatron FFN为例:
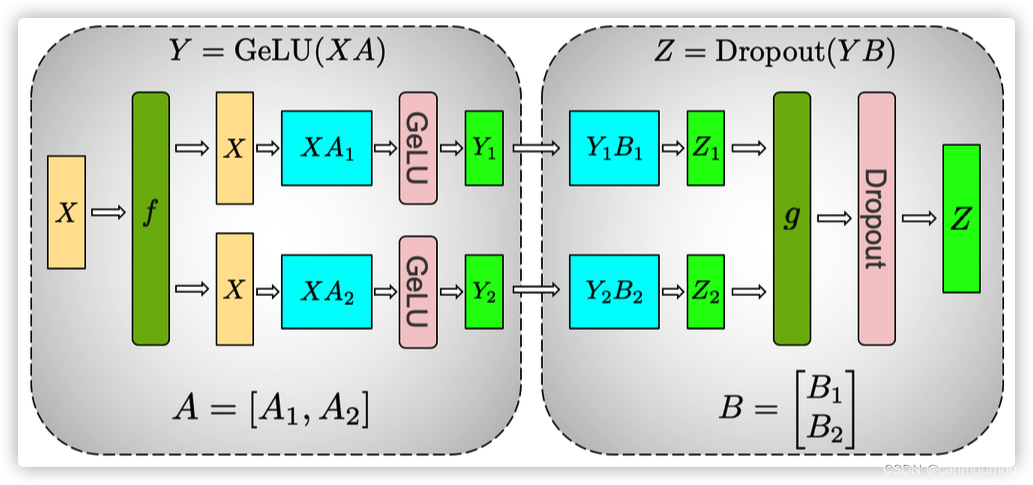
def forward(self, hidden_states):
# [b,s, h]->[b, s, 4h/tp]
intermediate_parallel = self.dense_h_to_4h(hidden_states) # ColumnParallel
intermediate_parallel = F.Gelu(intermediate_parallel + bias_parallel)
#[b, s, 4h/tp]->[b, s, h]
output = self.dense_4h_to_h(intermediate_parallel) # RowParallelLinear
return output
column parallel(纵向切分)
在这里插入图片描述
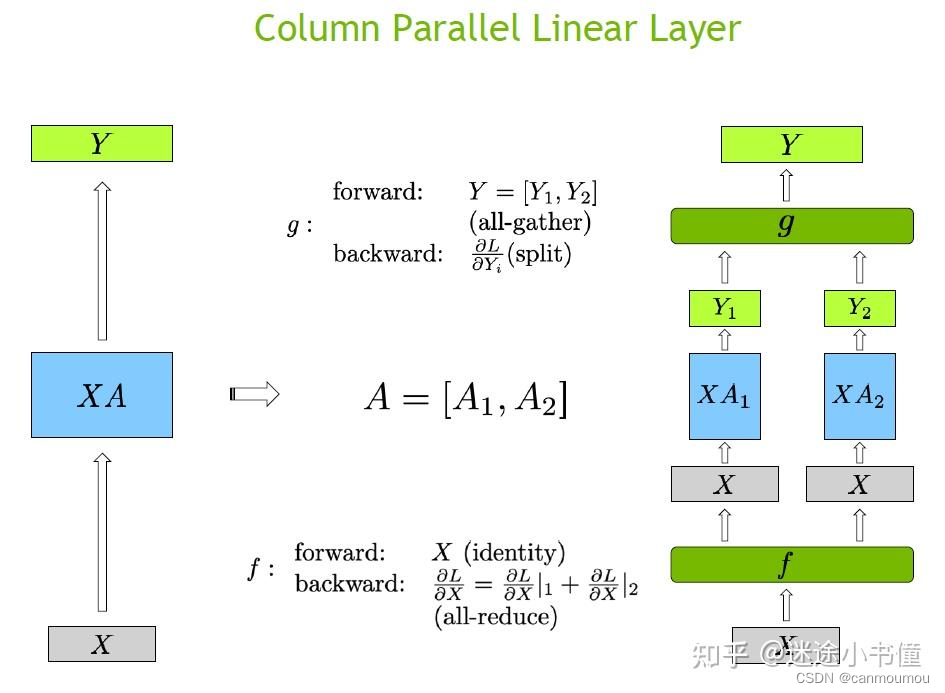
def forward(self, input_):
# Set up backprop all-reduce. h4h/pgpu
identityall-reducef
input_parallel = copy_to_tensor_model_parallel_region(input_)
bias = self.bias if not self.skip_bias_add else None
# X * A_i^T = (b, s, h) * (h, 4h/tp) = (b, s, 4h/tp)
output_parallel = F.linear(input_parallel, self.weight, bias)
return output_parallel
row parallel(横向)
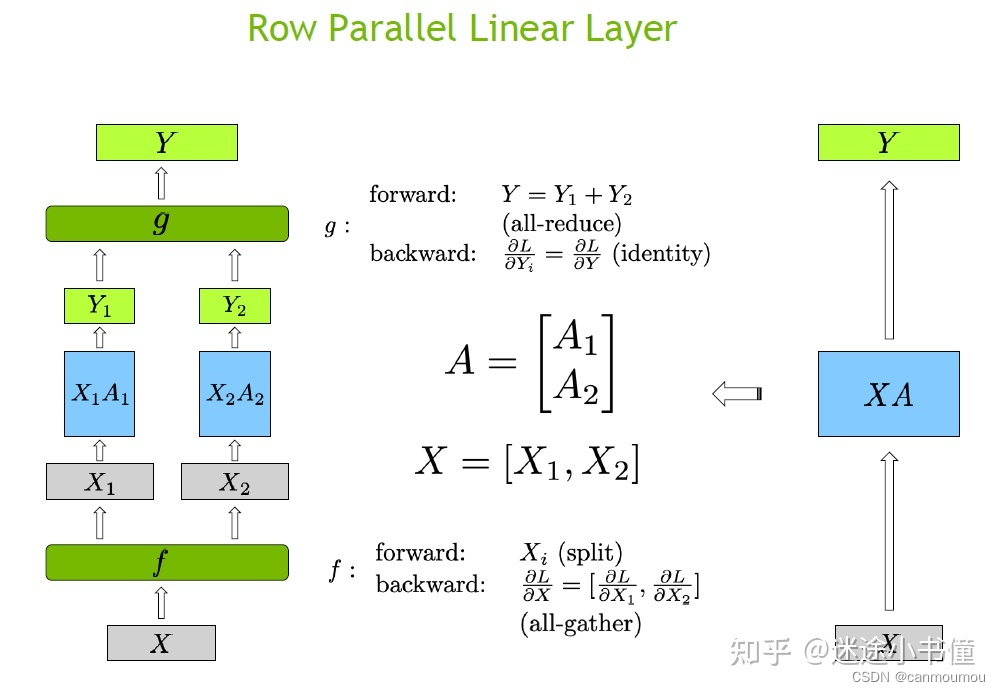
def forward(self, input_):
# Matrix multiply. X_i=(b, s, 4h/tp) * A_i^T=(4h/tp, h) -> (b, s, h)
output_parallel = F.linear(input_, self.weight)
# All-reduce across all the partitionsg.
output_ = reduce_from_tensor_model_parallel_region(output_parallel)
if not self.skip_bias_add:
output = output_ + self.bias if self.bias is not None else output_
else:
output = output_
return output
疑问:为什么第1个linear层是列切而不是行切?
如果第一个linear层使用行切,relu或者bert中的gelu都是非线性函数,那么我们无法先执行这个非线性函数,然后再相加,即gelu(X1A1)+gelu(X2A2) != gelu(X1A1+X2A2)。所以满足等价性,需要在gelu之前加一个allreduce同步一下,这种做法性能不是最优的。
2) Pipeline parallel
pipeline parallel是把整个模型的层数切分到不同的 pipeline parallel process group所在的rank上,每个pipeline stage拿到的层是不同的,如下图:

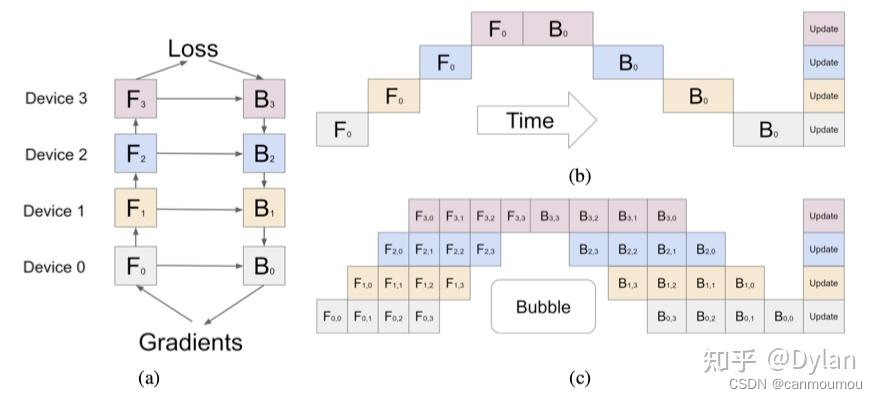
这样做的话,大部分GPU都处在一个等待状态,所以利用率并不高。
假设有K个GPU,每个mini-batch切分成M个micro-batches,Bubble率为
K
−
1
/
M
+
K
−
1
K-1/M+K-1
K−1/M+K−1
GPipe的论文中提到当M大于四倍K的时候,基本上Bubble就可以忽略不计了(还有一部分原因是在计算梯度的时候,作者在前面的层提前计算了activation,而不用等到后面层的梯度计算完,这样能一定程度上实现并行)。
G-pipe
可以看到,G-pipe将1个mini-batch切分成多个micro-batch(上图是8),前向时每个micro-batch从device1流向device4,反向时在device4上算出梯度后并更新device4对应层的参数,然后将梯度send给device3,device3做梯度计算和参数更新后传给device2,以此类推直至device1参数更新完后,第一个mini-batch就结束了。
在G-pipe里,micro-batch切的数量越多,pipeline bubble就越少,但会带来很高的显存占用,因为每份micro-batch都要存储activation为反向计算梯度使用。
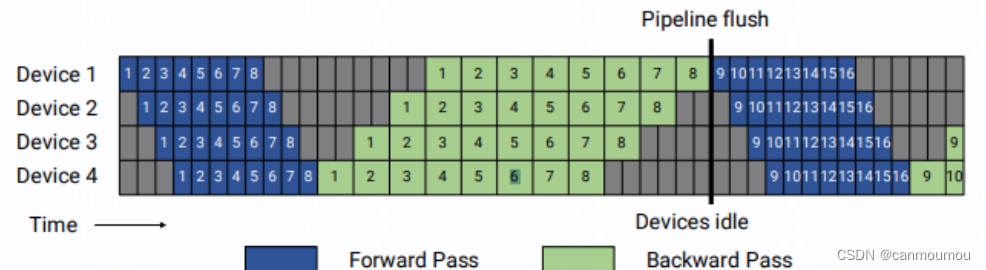
为了缓解显存问题,NV提出了1F1B(one forward one backward)方法。

与G-pipe不同,1F1B在每算完一个micro-batch的前向后就会立即算反向,反向完成后就可以释放该micro-batch对应的activation。
在step中间稳定阶段,形成1前向1反向的形式,该阶段每个device上只需要保存1份micro-batch的激活。相比于G-pipe要保存micro-batch数量的激活值,无论是显存占用还是pipeline bubble率均减少了很多。
Interleaved 1F1B
为了进一步降低Bubble率,Megatron-LM的第二篇论文里面在PipeDream的基础上做了进一步改进。

interleaved-1F1B在 device 数量不变的情况下,对micro-batch进一步切分,分出了更多的 pipeline stage(称为virtual pipeline stage),以更多的通信量,换取pipeline bubble比率降低。
那么它是怎么解决计算负载不均衡呢?假设网络共16层(编号 0-15),4个Device,前述 G-pipe 和 1F1B是分成 4 个stage, 按编号 0-3 层放 Device1,4-7层放 Device2 以此类推。
interleaved-1F1B则是按virtual_pipeline_stage 概念减小切分粒度,以 virtual_pipeline_stage=2 为例,将 0-1 层放 Device1、2-3 层放在 Device2,…,6-7 层放到 Device4,8-9 层继续放在 Device1,
10-11 层放在 Device2,…,14-15 层放在 Device4。
不过如果本身在PipeDream里面每个设备就只执行一层网络的话,就没有办法进一步通过Interleaved 1F1B进行优化了。
Megatron-LM 1F1B核心代码
def forward_backward_pipelining_without_interleaving(...):
for i in range(num_microbatches_remaining):
output_tensor = forward_step(...)
if forward_only:
p2p_communication.send_forward(output_tensor, timers)
else:
output_tensor_grad = p2p_communication.send_forward_recv_backward(output_tensor, timers)
# Add input_tensor and output_tensor to end of list, then pop from the
# start of the list for backward pass.
input_tensors.append(input_tensor)
output_tensors.append(output_tensor)
if forward_only:
if not last_iteration:
input_tensor = p2p_communication.recv_forward(timers)
else:
input_tensor, output_tensor = input_tensors.pop(0), output_tensors.pop(0)
input_tensor_grad = backward_step(...)
if last_iteration:
input_tensor = None
p2p_communication.send_backward(input_tensor_grad, timers)
else:
input_tensor = p2p_communication.send_backward_recv_forward(input_tensor_grad, timers)
参考
- How PyTorch implements DataParallel?
- PyTorch2 doc:DATAPARALLEL
- PyTorch distributed: experiences on accelerating data parallel training
- GPU-内存拷贝
- https://arxiv.org/pdf/2001.08361.pdf
- https://www.usenix.org/conference/osdi20/presentation/jiang