UE4/UE5 基于2D屏幕坐标获取场景3D坐标
- 一、射线检测
- 1)定义
- 1)射线与3D场景中的物体交互的流程
- 2)射线检测蓝图函数
- 3)蓝图实现根据鼠标点击位置获取场景中的坐标值
- 4)根据相机中心点获取场景中的坐标值
- 5)射线检测相关C++函数
- 6)C++实现手动创建射线检测
- 7)C++实现点击获取场景中的坐标值
- 二、非射线检测的情况
- 1)根据相机当前位置获取中心点的世界坐标
一、射线检测
1)定义
射线检测(Ray Casting) 是一种计算机图形和计算机图形学中的基本技术,用于检测光线或射线是否与三维场景中的物体相交,以确定相交点的位置和其他相关信息。射线检测通常用于实现各种交互功能、渲染效果和物理模拟,包括但不限于鼠标拾取、光线追踪、碰撞检测和物体拾取等。
1)射线与3D场景中的物体交互的流程
| 步骤 | 描述 |
|---|---|
| 1 | 定义射线: 定义射线的起点和方向向量。 |
| 2 | 检测相交: 沿着射线的方向,从起点开始沿射线前进,检测射线是否与场景中的任何物体相交。 通常,这涉及到进行碰撞检测,以确定是否有物体与射线相交。 |
| 3 | 确定交点: 如果射线与物体相交,计算交点的位置。 交点通常以3D坐标的形式给出,表示射线与物体相交的点。 |
| 4 | 处理交互: 根据应用的需求,您可以在交互点上执行特定的操作,如选择物体、执行动作或渲染效果。 |
| 5 | 遍历所有可能的相交点: 射线检测通常可以返回多个相交点,因此可以考虑遍历所有可能的交点以处理多重相交。 |
2)射线检测蓝图函数
| 蓝图函数 | 描述 |
|---|---|
LineTraceByChannel | 执行一条射线检测,检测与指定碰撞通道相交的物体。返回一个 Hit Result 结构。 |
SphereTraceByChannel | 以球体的形状执行射线检测,检测球体与物体的碰撞。返回一个 Hit Result 结构。 |
LineTraceMultiByChannel | 执行射线检测,检测与指定碰撞通道相交的所有物体。返回一个 Hit Results 数组。 |
SphereTraceMultiByChannel | 以球体的形状执行射线检测,检测球体与多个物体的碰撞。返回一个 Hit Results 数组。 |
BoxTraceByChannel | 执行射线检测,检测与指定碰撞通道相交的物体,使用盒子形状。返回一个 Hit Result 结构。 |
MultiSphereTraceByChannel | 执行多个球体形状的射线检测,检测多个球体与物体的碰撞。返回一个 Hit Results 数组。 |
LineTraceForObjects | 执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
SphereTraceForObjects | 以球体的形状执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
BoxTraceForObjects | 执行射线检测,检测与指定物体类型相交的物体,使用盒子形状。返回一个 Hit Result 结构。 |
MultiSphereTraceForObjects | 执行多个球体形状的射线检测,检测与指定物体类型相交的物体。返回一个 Hit Results 数组。 |
CapsuleTraceByChannel | 以胶囊体的形状执行射线检测,检测胶囊体与物体的碰撞。返回一个 Hit Result 结构。 |
CapsuleTraceForObjects | 以胶囊体的形状执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
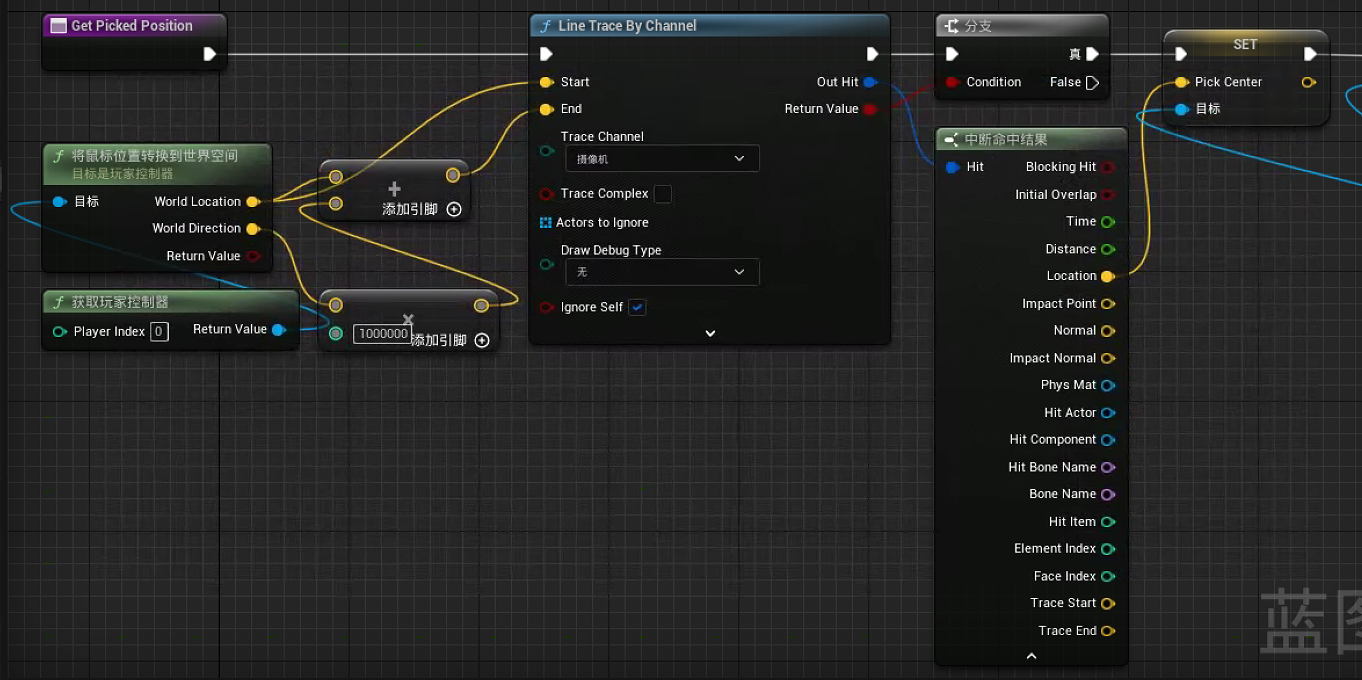
3)蓝图实现根据鼠标点击位置获取场景中的坐标值
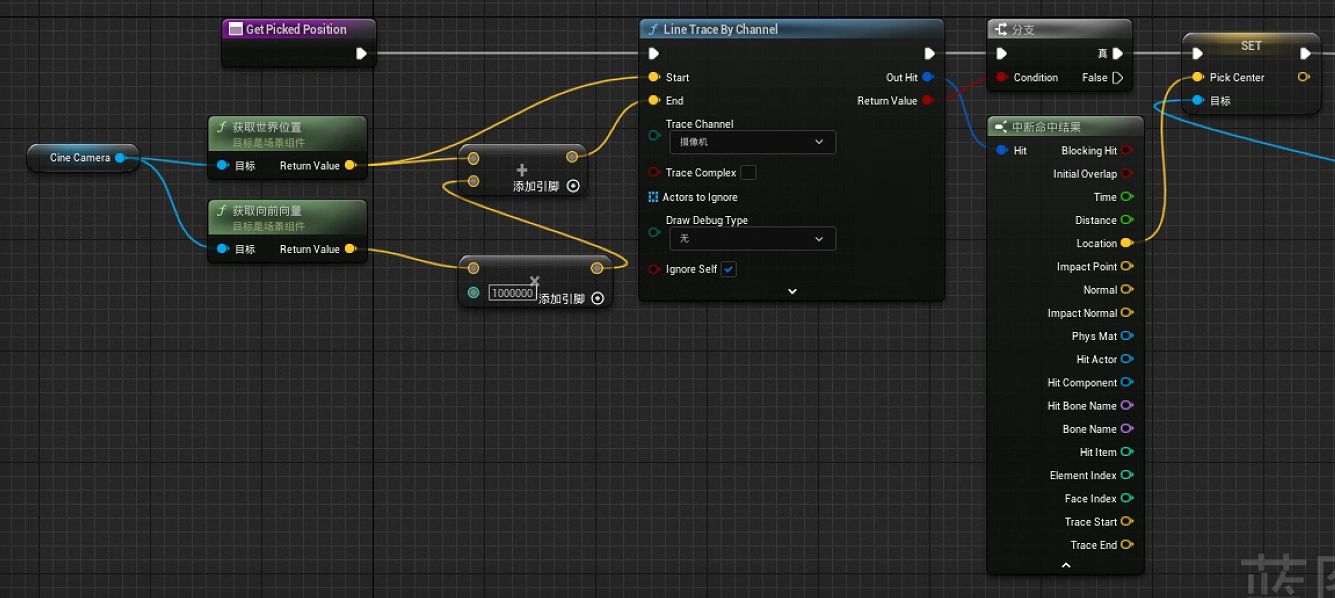
4)根据相机中心点获取场景中的坐标值
需要获取到pawn里的相机。
5)射线检测相关C++函数
(仅列举linetrace系列其他大同小异)
LineTraceSingleByChannel:- 用于检测一条射线与第一个相交物体的碰撞。
- 返回一个
FHitResult结构,其中包含有关碰撞的信息,如碰撞点、碰撞法线和碰撞物体的引用。
bool UWorld::LineTraceSingleByChannel(FHitResult& OutHit, const FVector Start, const FVector End, ECollisionChannel TraceChannel, const FCollisionQueryParams& Params)
LineTraceMultiByChannel:- 用于检测一条射线与多个相交物体的碰撞。
- 返回一个
TArray<FHitResult>,其中包含所有相交物体的碰撞信息。
int32 UWorld::LineTraceMultiByChannel(TArray<FHitResult>& OutHits, const FVector Start, const FVector End, ECollisionChannel TraceChannel, const FCollisionQueryParams& Params)
LineTraceSingleByObjectType:- 类似于
LineTraceSingleByChannel,但是使用物体类型(EObjectTypeQuery)而不是碰撞通道进行检测。
- 类似于
bool UWorld::LineTraceSingleByObjectType(FHitResult& OutHit, const FVector Start, const FVector End, FObjectQueryParams ObjectQueryParams, const FCollisionQueryParams& Params)
LineTraceMultiByObjectType:- 类似于
LineTraceMultiByChannel,但是使用物体类型(EObjectTypeQuery)而不是碰撞通道进行检测。
- 类似于
int32 UWorld::LineTraceMultiByObjectType(TArray<FHitResult>& OutHits, const FVector Start, const FVector End, FObjectQueryParams ObjectQueryParams, const FCollisionQueryParams& Params)
6)C++实现手动创建射线检测
FVector StartLocation; // 射线的起点坐标
FVector ForwardVector; // 射线的方向向量
FHitResult HitResult; // 用于存储碰撞信息的变量
// 设置射线的起点坐标
StartLocation = PlayerCameraComponent->GetComponentLocation(); // PlayerCameraComponent是摄像机组件
// 设置射线的方向向量
ForwardVector = PlayerCameraComponent->GetForwardVector(); // 获取摄像机的前向向量
// 建立射线
FVector EndLocation = ((ForwardVector * RayLength) + StartLocation); // 计算射线的终点坐标
// 进行射线检测
if (GetWorld()->LineTraceSingleByChannel(HitResult, StartLocation, EndLocation, ECC_Visibility))
{
// 射线与物体相交,可以在HitResult中获取碰撞信息
AActor* HitActor = HitResult.GetActor();
FVector ImpactPoint = HitResult.ImpactPoint;
// 进一步处理交互逻辑
}
PlayerCameraComponent:摄像机组件
LineTraceSingleByChannel:射线检测函数
HitResult:碰撞的物体和碰撞点
RayLength:射线的长度;
ECC_Visibility:射线检测所使用的碰撞通道
7)C++实现点击获取场景中的坐标值
void AYourPlayerController::GetSceneLocationFromMouse()
{
// 获取玩家控制器
APlayerController* PlayerController = this;
if (PlayerController)
{
// 获取鼠标点击位置
FVector MouseLocation, MouseDirection;
PlayerController->DeprojectMousePositionToWorld(MouseLocation, MouseDirection);
// 创建射线,用于射线检测
FHitResult HitResult;
FCollisionQueryParams CollisionParams;
// 执行射线检测
if (GetWorld()->LineTraceSingleByChannel(HitResult, MouseLocation, MouseLocation + MouseDirection * YourRayLength, ECC_Visibility, CollisionParams))
{
// 获取射线与场景相交的位置
FVector SceneLocation = HitResult.Location;
// 打印结果
UE_LOG(LogTemp, Warning, TEXT("Scene Location: %s"), *SceneLocation.ToString());
}
}
}
二、非射线检测的情况
1)根据相机当前位置获取中心点的世界坐标
void AYourPlayerController::GetCameraCenterLocation()
{
// 获取玩家控制器的视图控制器
APlayerController* PlayerController = this;
if (PlayerController)
{
// 获取相机组件
UCameraComponent* CameraComponent = PlayerController->PlayerCameraManager->GetCameraComponent();
if (CameraComponent)
{
// 获取相机位置
FVector CameraLocation = CameraComponent->GetComponentLocation();
// 获取相机旋转
FRotator CameraRotation = CameraComponent->GetComponentRotation();
// 计算相机中心点的位置(通常位于相机位置的前方,视角方向)
FVector CameraForwardVector = CameraRotation.Vector();
FVector CameraCenterLocation = CameraLocation + CameraForwardVector * YourDistance; // 替换 YourDistance 为相机中心点到相机位置的距离
// 将相机中心点的位置转换为场景中的坐标
FVector WorldLocation = CameraCenterLocation;
// 打印结果
UE_LOG(LogTemp, Warning, TEXT("Camera Center Location: %s"), *WorldLocation.ToString());
}
}
}