目录
一、介绍
二、估计直升机的叶片速度
三、直升机回声模拟
四、叶片返回微多普勒分析
五、汽车雷达中的行人识别
六、行人微多普勒提取
七、总结
八、程序
本例介绍了由于目标旋转而对目标进行雷达回波时微多普勒效应的基本概念。可以使用微多普勒特征来帮助识别目标。
一、介绍
由于多普勒效应,移动目标会在雷达回波中引入频移。但是,由于大多数目标不是刚体,因此除了平台运动外,目标的不同部分通常还存在其他振动和旋转。例如,当直升机飞行时,其叶片旋转,或者当一个人走路时,他们的手臂自然摆动。这些微尺度运动会产生额外的多普勒频移,称为微多普勒效应,可用于识别目标特征。此示例显示了微多普勒效应可能有用的两个应用。在第一种应用中,微多普勒特征用于确定直升机的叶片速度。在第二种应用中,微多普勒特征用于识别汽车雷达回波中的行人。
二、估计直升机的叶片速度
考虑一架带有四个旋翼叶片的直升机。假设雷达位于原点。将直升机的位置指定为 (500, 0, 500),这会将其与雷达的距离设置为以米为单位,速度为 (60, 0, 0) m/s。
在此模拟中,直升机由五个散射体建模:旋转中心和四个叶片的尖端。旋转中心随直升机机身移动。每个刀片尖端与其相邻刀片的尖端相距 90 度。叶片以每秒 4 转的恒定速度旋转。每个刀片的臂长为6.5米。假设所有四个叶片尖端具有相同的反射率,而旋转中心的反射率更强。
三、直升机回声模拟
假设雷达以 5 GHz 的频率运行,脉冲很简单。脉冲重复频率为 20 kHz。为简单起见,假设信号在自由空间中传播。
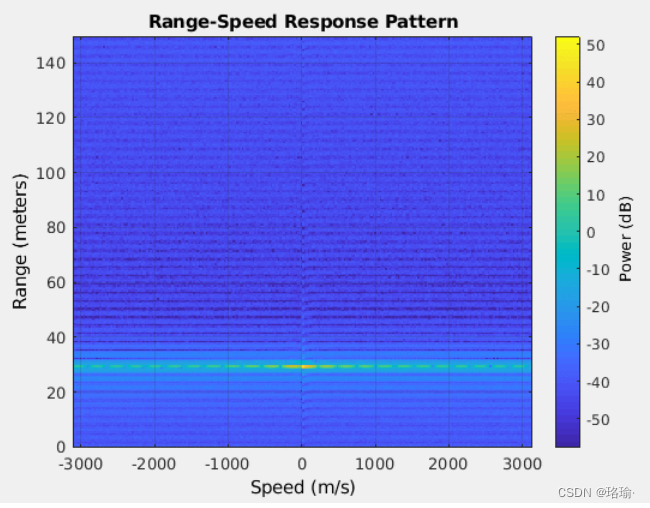
在每个脉冲下,直升机都会沿着其轨迹移动。同时,叶片不断旋转,叶片的尖端引入了额外的位移和角速度。该图显示了使用接收信号的前128个脉冲的距离多普勒响应。可以在大约 700 米的目标范围内看到三个回波的显示。
虽然回报看起来好像来自不同的目标,但实际上它们都来自同一个目标。中心回波来自旋转中心,与其他两个回波相比要强得多。这种强度是因为与叶片尖端相比,直升机机身的反射更强。该图显示了旋转中心的速度为 -40 m/s。该值与目标径向速度的真实值相匹配。
另外两个回波来自叶片以最大速度接近或离开目标时的尖端。从图中可以看出,对应于这两个进近和离开检测的速度分别约为75 m/s和-160 m/s。
可以通过进一步处理将所有三个检测关联到同一目标,但该主题超出了此示例的范围。
四、叶片返回微多普勒分析
微多普勒效应的时频表示可以揭示更多信息。此代码在检测到的目标范围箱中构造时频表示形式。
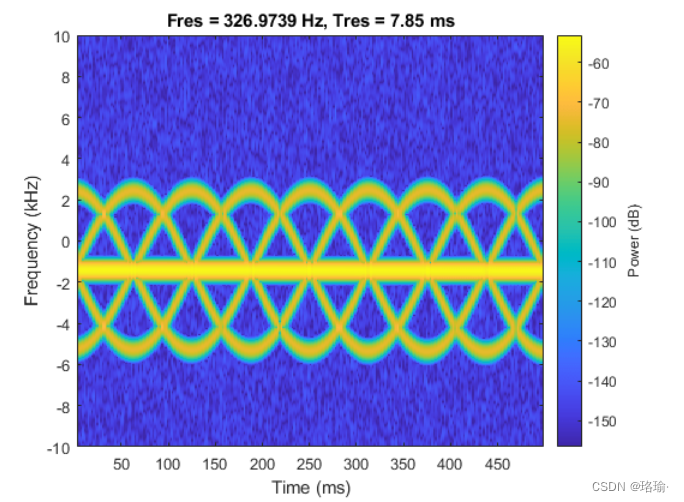
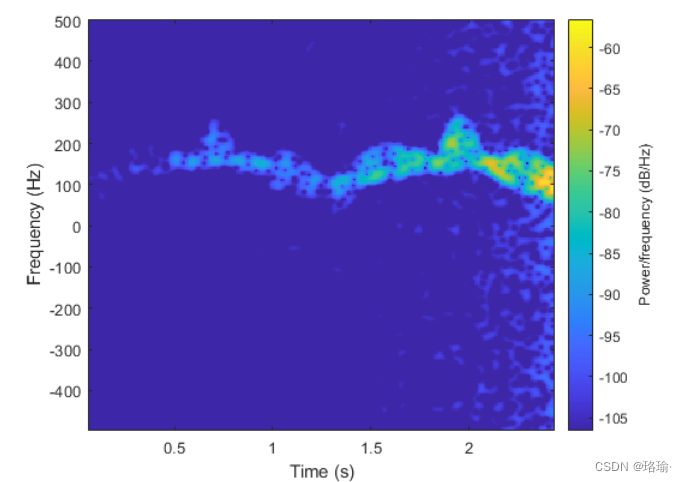
该图显示了由叶片尖端围绕恒定多普勒频移引起的微多普勒调制。该图像表明,每个叶片尖端都引入了类似正弦波的多普勒调制。如下图所示,在正弦曲线的每个周期内,有三个额外的正弦曲线出现在相等的距离上。这种外观表明直升机配备了四个等间距的叶片。
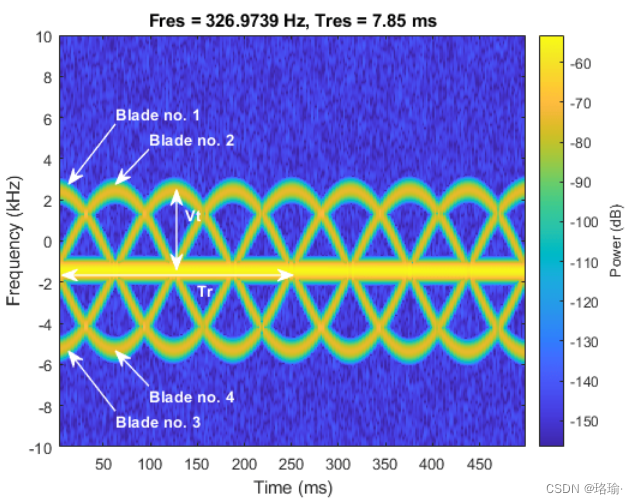
除了叶片的数量外,图像还显示每个正弦波Tr的周期约为250毫秒。此值表示刀片在 250 毫秒后返回到其原始位置。在这种情况下,直升机的角速度约为每秒4转,与模拟参数相匹配。
该图像还显示了尖端速度Vt,可以从最大多普勒得出。最大多普勒距离体运动引入的恒定多普勒约4 kHz。计算检测到的最大尖端速度。
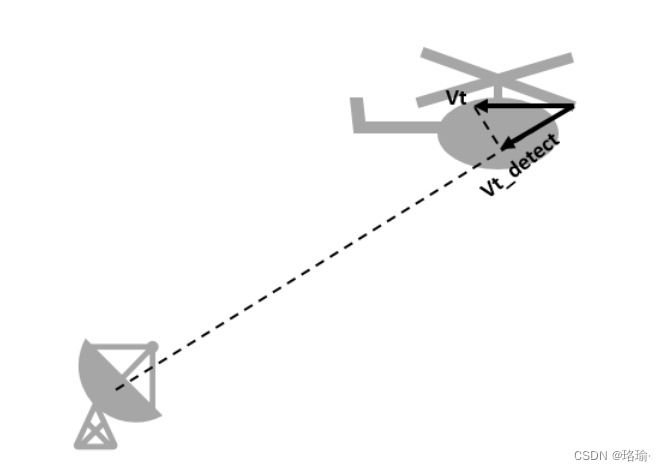
此值是沿径向的最大尖端速度。为了获得正确的最大尖端速度,必须考虑相对方向。由于叶片呈圆圈旋转,因此检测不受方位角的影响。仅校正最大尖端速度结果的仰角。
根据校正后的最大刀尖速度和叶片旋转速率,计算刀片长度。请注意,结果与 6.5 米的模拟参数匹配。叶片数量、叶片长度和叶片旋转速率等信息有助于识别直升机的型号。
五、汽车雷达中的行人识别
考虑带有FMCW汽车雷达系统的ego汽车,其带宽为250 MHz,工作频率为24 GHz。
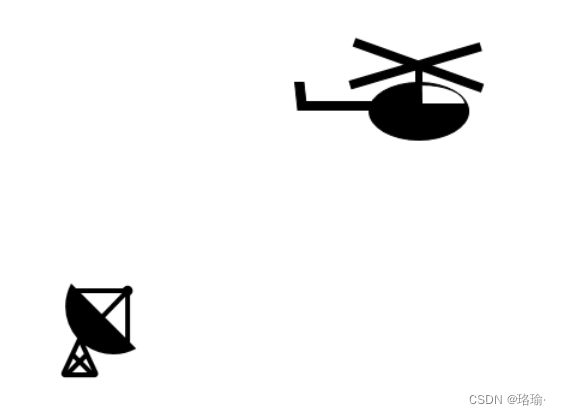
自我汽车沿着道路行驶。一路上,有一辆车停在路边,一个人在车后走出来。下图说明了该场景
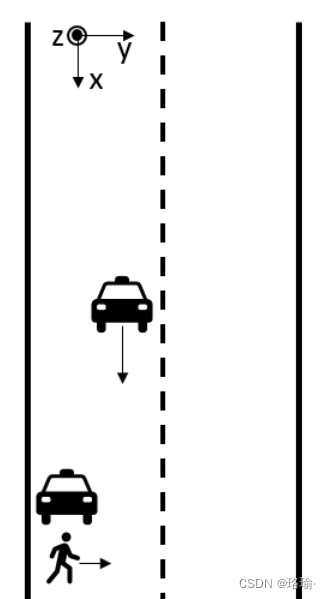
基于此设置,如果自我汽车无法识别行人存在,则可能会发生事故。
六、行人微多普勒提取
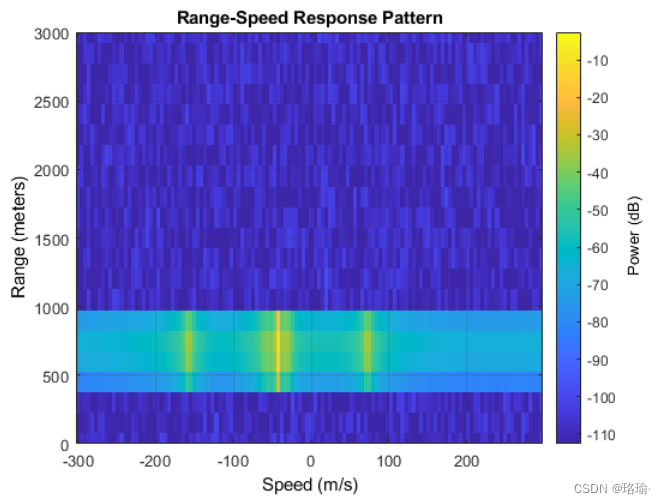
下图显示了自我汽车雷达随时间推移生成的距离多普勒图。由于停放的汽车是比行人强得多的目标,因此在距离多普勒地图中,行人很容易被停放的汽车遮挡。因此,地图始终显示单个目标。
这意味着在这种情况下,传统的加工无法满足我们的需求。 时频域中的微多普勒效应可以很好地确定雷达信号中是否嵌入了行人特征。例如,以下部分模拟雷达回波 2.5 秒。
在模拟信号中,仅包含行人的返回,而包含行人和停放的汽车的返回。如果我们仅使用行人的返回生成频谱图,我们将获得如下所示的图。
请注意,手臂和腿的摆动沿途在时频域中产生许多抛物线曲线。因此,此类要素可用于确定场景中是否存在行人。但是,当我们直接从总回报生成频谱图时,我们得到以下图。
 我在时频域中,停放的汽车的返回仍然主导着返回。因此,时间频率响应仅显示相对于停放的汽车的多普勒。多普勒频率的下降是由于自我汽车越来越靠近停放的汽车,相对速度下降到0。要查看强回报背后是否隐藏着回报,我们可以使用奇异值分解。下图显示了降程脉冲的奇异值的分布。
我在时频域中,停放的汽车的返回仍然主导着返回。因此,时间频率响应仅显示相对于停放的汽车的多普勒。多普勒频率的下降是由于自我汽车越来越靠近停放的汽车,相对速度下降到0。要查看强回报背后是否隐藏着回报,我们可以使用奇异值分解。下图显示了降程脉冲的奇异值的分布。
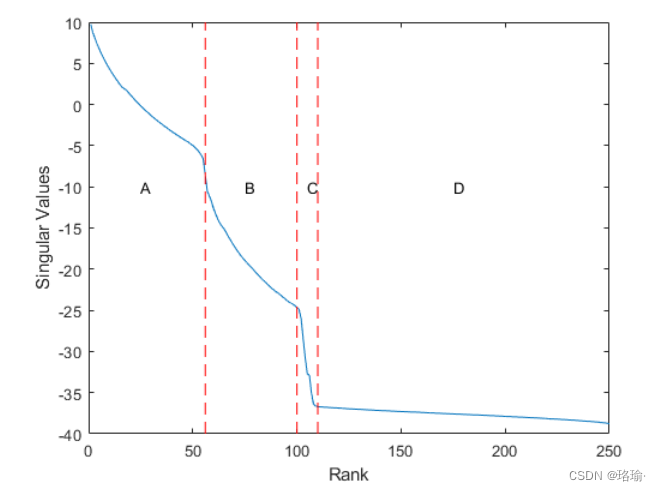
从曲线上可以清楚地看出,大约有四个区域。区域 A 代表对信号最重要的贡献,即停放的汽车。区域 D 表示噪声。因此,B区和C区是由于停放的汽车返回和行人返回的混合。因为从行人返回比从停放的汽车返回要弱得多。在区域 B 中,它仍然可以被停放的汽车返回的残留物所掩盖。因此,我们选择区域C来重建信号,然后再次绘制时间频率响应。
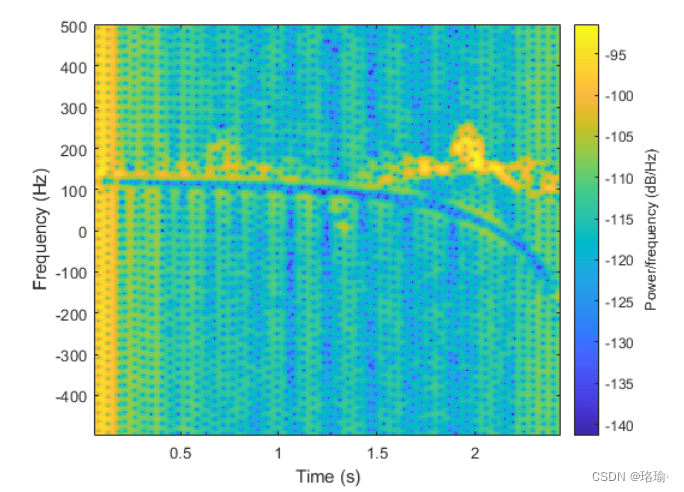
随着从汽车返回成功过滤,来自行人的微多普勒特征出现。因此,我们可以得出结论,现场有行人,并采取相应行动以避免事故发生。
七、总结
本例介绍了微多普勒效应的基本概念,并展示了其对目标返回的影响。它还展示了如何从接收到的I/Q信号中提取微多普勒特征,然后从微多普勒信息中导出相关的目标参数。
八、程序
使用Matlab R2022b版本,点击打开。
 打开下面的“MicroDopplerExample.m”文件,点击运行,就可以看到上述效果。
打开下面的“MicroDopplerExample.m”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:仿真多普勒效应及其影响,发送源码链接。