Pytorch图神经网络库——PyG基础操作
- 图数据处理
- 常用的基准数据库
- Mini-Batches
- Data Transforms
- 图学习方法
- 参考资料
PyG(PyTorch Geometric)是一个基于PyTorch构建的库,可轻松编写和训练图神经网络(GNN),用于与结构化数据相关的广泛应用。
它包括从各种已发表的论文中的图和其他不规则结构(也称为几何深度学习geometric deep learning)的各种方法。此外,它由易于使用的mini-batch加载器组成,用于在许多小型和单个巨型图上操作,多GPU支持,DataPipe支持,通过Quiver分布式图形学习,大量常见的基准数据集(基于简单的交互创建自己的界面),Graphgym实验管理器和有用的转换,可以在任意图以及3D网格或点云上学习。

图数据处理
单张图被PyG表示为torch_geometric.data.Data类型,有如下属性:
data.x: 节点的特征矩阵,形状为 [num_nodes, num_node_features]
data.edge_index: COO格式的图的边 shape [2, num_edges] and type torch.long
data.edge_attr:边的特征矩阵 shape [num_edges, num_edge_features]
data.y:训练数据的标签,节点级的目标 shape [num_nodes, *] or 图级的目标 shape [1, *]
data.pos: 节点的位置矩阵 shape [num_nodes, num_dimensions]
这些属性都不是必需的。事实上,Data 对象甚至不限于这些属性。例如,我们可以通过 data.face 扩展它,以保存形状为[3,num _ faces ]和torch.long 类型的张量中3D 网格中三角形的连通性。
PyTorch和torchvision将示例定义为图像和目标的元组。我们在PyG中省略了这个符号,以便以清晰易懂的方式实现各种数据结构。
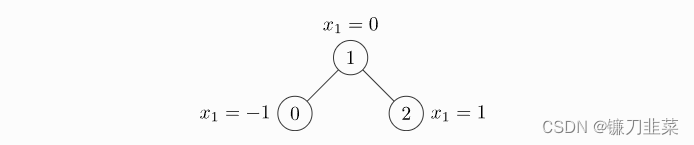
我们展示了一个具有三个节点和四条边的未加权无向图的简单示例。每个节点仅包含一个特征:
import torch
from torch_geometric.data import Data
# 一个无权无向图的示例
# 边的索引 COO格式 就是说第一行代表行索引 第二行代表列索引
# 节点0和1之间有一条边;节点1和2之间有一条边
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
# 节点0 1 2的特征分别是
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
data = Data(x=x, edge_index=edge_index)
#>>> Data(x=[3, 1], edge_index=[2, 4])
注意 edge _ index,即定义所有边的源节点和目标节点的张量,不是索引元组的列表。如果想这样写你的索引,应该在将它们传递给数据构造函数之前对它进行转置和调用:
# 不是COO格式的边,而是使用边的两个节点的元组形式
edge_index = torch.tensor([[0, 1],
[1, 0],
[1, 2],
[2, 1]], dtype=torch.long)
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
data = Data(x=x, edge_index=edge_index.t().contiguous())
虽然图只有两条边,但是我们需要定义四个索引元组来表示边的两个方向。
注意,edge _ index 中的元素必须只保存范围{0,... ,num _ node-1}内的索引。这是必需的,因为我们希望我们的最终数据表示尽可能紧凑,例如,我们希望通过 x [0]和 x [1]分别索引第一个边(0,1)的源和目标节点特征。
对于data提供了如下方法进行访问:
print(data.keys)
>>> ['x', 'edge_index']
print(data['x'])
>>> tensor([[-1.0],
[0.0],
[1.0]])
for key, item in data:
print(f'{key} found in data')
>>> x found in data
>>> edge_index found in data
'edge_attr' in data
>>> False
data.num_nodes
>>> 3
data.num_edges
>>> 4
data.num_node_features
>>> 1
data.has_isolated_nodes()
>>> False
data.has_self_loops()
>>> False
data.is_directed()
>>> False
# Transfer data object to GPU.
device = torch.device('cuda')
data = data.to(device)
可以在torch_geometric.data.data中找到所有方法的完整列表。
常用的基准数据库
PyG包含大量常见的基准数据集,例如所有Planetoid数据集(Cora、Citseeer、Pubmed)、来自http://graphkernels.cs.tu-dortmund.de的所有图分类数据集以及它们的简化版本,QM7和QM9数据集,以及少量3D网格/点云数据集,如FAUST、ModelNet10/40和ShapeNet。
初始化数据集很简单。数据集的初始化将自动下载其原始文件并将其处理为前面描述的 Data 格式。例如,要加载 ENZYMES 数据集(包括6个类中的600个图形) ,输入:
from torch_geometric.datasets import TUDataset
dataset = TUDataset(root='../DemoData/ENZYMES', name='ENZYMES')
len(dataset) # 600
dataset.num_classes # 6
dataset.num_node_features # 3
# 查看第一张图
data = dataset[0]
data # Data(edge_index=[2, 168], x=[37, 3], y=[1])
data.is_undirected() # True
我们可以看到数据集中的第一个图包含37个节点,每个节点有3个特性。有168/2 = 84条无向边,图被分配到一个类中。此外,数据对象只持有一个图级目标。
我们甚至可以使用切片、long或bool张量来分割数据集。例如,要创建90/10的训练/测试分割,输入:
train_dataset = dataset[:540]
>>> ENZYMES(540)
test_dataset = dataset[540:]
>>> ENZYMES(60)
# 同样 也可以打乱数据
dataset = dataset.shuffle()
>>> ENZYMES(600)
# 等于这个操作
perm = torch.randperm(len(dataset))
dataset = dataset[perm]
>> ENZYMES(600)
让我们再试一个! 我们下载Cora,半监督图节点分类的标准基准数据集,这个数据集是图神经网络论文中经常看见的数据集,是一个论文的引用图,节点的特征为论文的词向量:
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='/tmp/Cora', name='Cora')
>>> Cora()
len(dataset)
>>> 1 # 数据集只有一张图
dataset.num_classes
>>> 7 # 分为7类
dataset.num_node_features
>>> 1433 # 每个节点有1433维特征
data = dataset[0]
>>> Data(edge_index=[2, 10556], test_mask=[2708],
train_mask=[2708], val_mask=[2708], x=[2708, 1433], y=[2708])
data.is_undirected()
>>> True
注意:可能会出现:TimeoutError: [WinError 10060] 由于连接方在一段时间后没有正确答复或连接的主机没有反应,连接尝试失败。
解决方法可以更改源码中的下载地址。
Data对象保存每个节点的标签,以及额外的节点级属性:train_mask、val_mask和test_mask,其中
- Train_mask表示要训练哪个节点(140个节点),
- Val_mask表示使用哪些节点进行验证,例如,执行早期停止(500个节点),
- Test_mask表示要测试哪个节点(1000个节点)。
比如data.train_mask是一个一维的bool类型的tensor,里面的数据是True就代表是训练数据。
data.train_mask.sum().item()
>>> 140
data.val_mask.sum().item()
>>> 500
data.test_mask.sum().item()
>>> 1000
Mini-Batches
神经网络通常以批处理方式进行训练。PyG通过创建稀疏块对角邻接矩阵(由edge_index定义)并在节点维度中连接特征矩阵和目标矩阵,在小批量上实现并行化。这种组合允许在一个批处理中不同数量的节点和边:

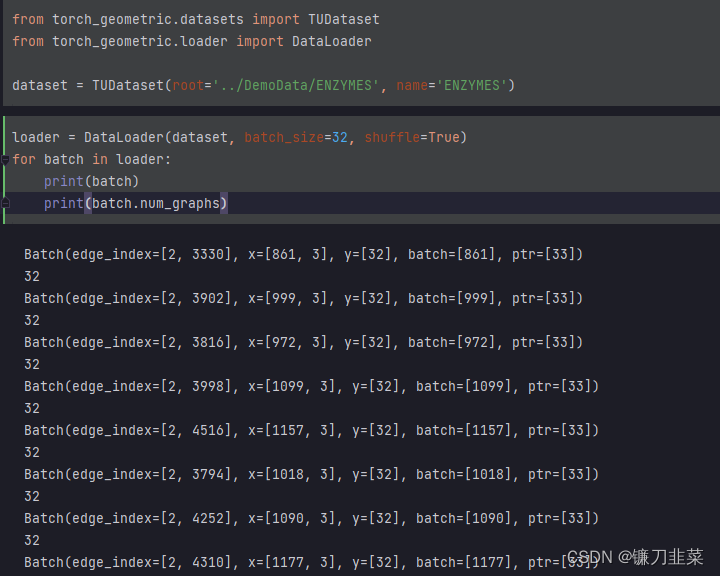
PyG包含它自己的torch_geometric.loader.DataLoader,它已经处理了这个连接过程。其实使用的过程和torch里面的DataLoader是一样的:
torch_geometric.data.Batch从torch_geometric.data.Data继承,并包含称为batch的附加属性。batch是一个列向量,保存了batch中每个节点和对应图的映射关系。可以使用batch来计算batch中每个图中各个节点的平均特征。
from torch_scatter import scatter_mean
for data in loader:
print(data) # DataBatch(batch=[1082], edge_index=[2, 4066], x=[1082, 21], y=[32])
print(data.num_graphs) # 32
x = scatter_mean(data.x, data.batch, dim=0)
print(x.size()) # torch.Size([32, 21])
Data Transforms
下面以一个例子来解释,ShapeNet数据集是包含17000个3D点云的数据集。
from torch_geometric.datasets import ShapeNet
dataset = ShapeNet(root='/tmp/ShapeNet', categories=['Airplane'])
dataset[0]
>>> Data(pos=[2518, 3], y=[2518])
我们可以通过transforms将点云生成最近邻图,将点云数据集转换为图数据集:
import torch_geometric.transforms as T
from torch_geometric.datasets import ShapeNet
# 主要就是加了最后一个参数pre_transform
dataset = ShapeNet(root='/tmp/ShapeNet', categories=['Airplane'],pre_transform=T.KNNGraph(k=6))
dataset[0]
>>> Data(edge_index=[2, 15108], pos=[2518, 3], y=[2518])
pre_transform参数可以在数据存入磁盘之前进行转换,在下次使用时,数据集将自动包含边。
此外,我们可以使用transform参数来随机增强一个Data对象,例如,将每个节点的位置转换为一个小数字:
import torch_geometric.transforms as T
from torch_geometric.datasets import ShapeNet
dataset = ShapeNet(root='../DemoData/ShapeNet', categories=['Airplane'], pre_transform=T.KNNGraph(k=6), transform=T.RandomTranslate(0.01))
dataset[0] # Data(x=[2518, 3], y=[2518], pos=[2518, 3], category=[1])
图学习方法
在学习了PyG中的数据处理、datasets, loader 以及 transforms之后,是时候实现我们的第一个图形神经网络了!
我们将使用一个简单的 GCN 层,并在 Cora 引文数据集上复制实验。要了解 GCN 的高层解释,可以看看它的博客文章。
首先,加载数据集:
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='/data/Cora', name='Cora')
然后,定义一个两层的GCN,和torch里面的定义方式一样,只是在传入GCN网络时传的是两个参数,第一个是数据特征,第二个是边的index。数据特征x就是每个节点的特征向量,edge_index就是(2,节点数)的Tensor,表示哪两个节点之间有边。卷积层后面的ReLU激活函数以及dropout层也是常用的,也不做介绍。
import torch
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
class GCN(torch.nn.Module):
def __init__(self):
super().__init__()
self.conv1 = GCNConv(dataset.num_node_features, 16)
self.conv2 = GCNConv(16, dataset.num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
然后对网络进行训练,训练的方式也是和torch中形式一样的:
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = GCN().to(device)
data = dataset[0].to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
model.train()
for epoch in range(200):
optimizer.zero_grad()
out = model(data)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
最后网络新的训练精度进行测试:
model.eval()
pred = model(data).argmax(dim=1)
correct = (pred[data.test_mask] == data.y[data.test_mask]).sum()
acc = int(correct) / int(data.test_mask.sum())
print(f'Accuracy: {acc:.4f}')
>>> Accuracy: 0.8150
最后做个总结:使用PyG创建图神经网络模型的过程,和基于Pytorch的过程差不多,其中最重要的是DataLoader的写法。
需要注意的是,如果使用 torch_geometric.datasets中没有的数据集的话,将数据转化为图的形式可能需要一些时间。
参考资料
[1] https://pytorch-geometric.readthedocs.io/en/latest/notes/introduction.html
[2] https://github.com/pyg-team/pytorch_geometric
[3] https://blog.csdn.net/qq_40344307/article/details/122160733
[4] GRAPH CONVOLUTIONAL NETWORKS

![[oeasy]python0031_挂起进程_恢复进程_进程切换](https://img-blog.csdnimg.cn/img_convert/9f9420c17a6517a37e0382e5899934e4.png)