目录
- 一.红黑树的概念
- 二.插入操作
- 三.与AVL树的比较
一.红黑树的概念
在之前的学习中,我们了解了二叉搜索平衡树,AVL树通过控制每个结点中的平衡因子的绝对值不超过1,实现了一个高性能的树。而相较于AVL的高度平衡,红黑树觉得AVL为了平衡也付出了代价(插入和删除时进行了多次旋转),所以红黑树在控制平衡上面没有这么严格,只是要求,最长路径不超过最短路径的二倍。那红黑树又是如何控制实现的呢?接下来了解一下红黑树的性质:
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的(任何路径上没有连续两个红结点)
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均 包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点,也称为NIL结点)
二.插入操作
在我们了解红黑树的性质后,就需要分析相关代码看他如何实现的。首先我们看红黑树结点的定义:
因为map和set的底层使用红黑树实现了,为了之后方便,这里红黑树用了两个模板参数。
#include <iostream>
using namespace std;
enum Colour
{
RED, BLACK
};
template<class K,class V>
class RBTreeNode
{
public:
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
pair<K, V> _kv;
Colour _col;
RBTreeNode(const pair<K,V>& kv)
:_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_kv(kv)
,_col(RED)
{}
};
结点定义中与AVL树差距不大,只是多了个用枚举定义的参数,用来指定是红结点还是黑结点。接下来讲解重点的插入操作:
首先因为红黑树也是二叉搜索树,所以要满足二叉搜索树的基本性质,再者是我们插入的结点的颜色先置为什么能让后面的调整更方便呢。如果黑色需要在后面依据性质4调整,插入红色的话依据性质3调整。明显是4更为复杂,所以我们插入颜色为红色。
bool Insert(const pair<K, V>& kv)
{
if(_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;
return true;
}
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (kv.first > cur->_kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (kv.first < cur->_kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
cur = new Node(kv);
cur->_col = RED;
if (parent->_kv.first > cur->_kv.first)
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
cur->_parent = parent;
///开始调整颜色
///开始调整颜色
_root->_col = BLACK;
return true;
}
上段代码是不涉及调整颜色,只保证二叉搜索树性质。下面开始分类讨论研究如何调整颜色。
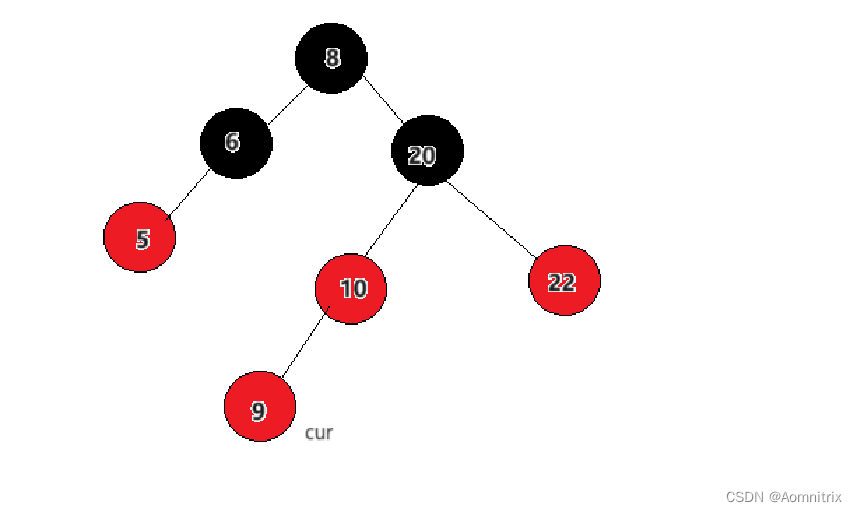
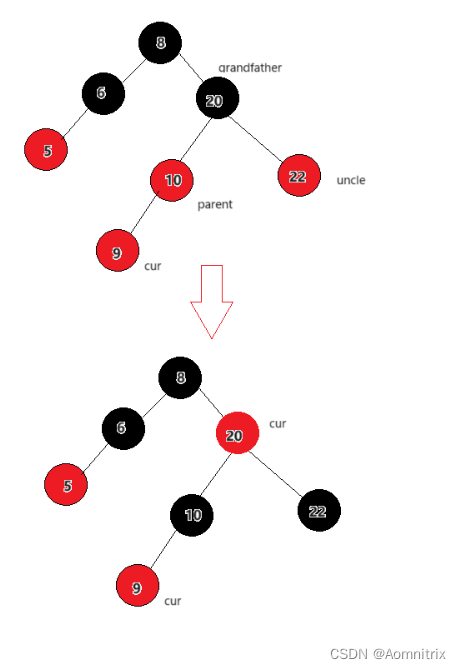
如上图所示,插入的cur结点是红色,这时出现了连续的两个红结点,所以就要进行调整。如果parent结点是黑色则不需要调整。我们把10结点和20结点称为parent和grandfather结点,22为uncle结点。
1.当uncle结点为红色时,变色然后继续向上调整
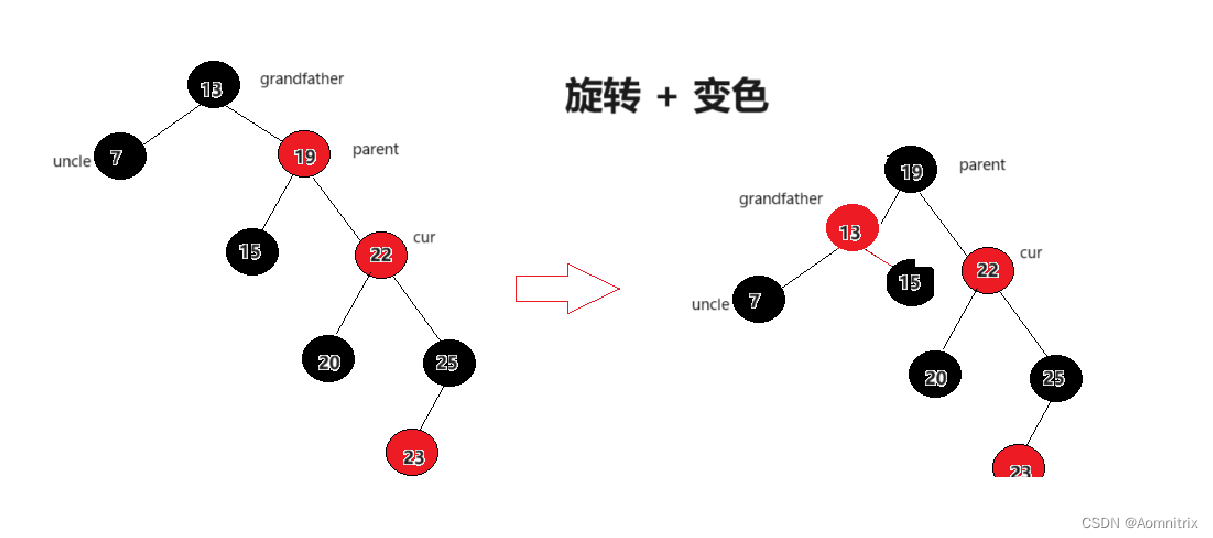
2.当uncle结点不存在时或者为黑时的处理方式相同:
完整代码如下:
bool Insert(const pair<K, V>& kv)
{
if(_root == nullptr)
{
_root = new Node(kv);
_root->_col = BLACK;
return true;
}
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (kv.first > cur->_kv.first)
{
parent = cur;
cur = cur->_right;
}
else if (kv.first < cur->_kv.first)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
cur = new Node(kv);
cur->_col = RED;
if (parent->_kv.first > cur->_kv.first)
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
cur->_parent = parent;
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent;
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;//叔叔存在且为红
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
else // 叔叔不存在或者为黑都是旋转+变色
{
if (cur == parent->_left)
{
RevoR(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
RevoL(parent);
RevoR(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
}
}
else
{
Node* uncle = grandfather->_left;//叔叔存在且为红
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
else // 叔叔不存在或者为黑都是旋转+变色
{
if (cur == parent->_left)
{
RevoR(parent);
RevoL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
else
{
RevoL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
}
}
}
_root->_col = BLACK;
return true;
}
void RevoL(Node* parent)
{
Node* cur = parent->_right;
Node* curleft = cur->_left;
parent->_right = curleft;//无论curleft是否为空都要执行这一步
if (curleft)
{
curleft->_parent = parent;
}
cur->_left = parent;
Node* ppnode = parent->_parent;
parent->_parent = cur;
if (parent == _root)
{
_root = cur;
cur->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
cur->_parent = ppnode;
}
}
void RevoR(Node* parent)
{
Node* cur = parent->_left;
Node* curright = cur->_right;
parent->_left = curright;
if (curright)
{
curright->_parent = parent;
}
cur->_right = parent;
Node* ppnode = parent->_parent;
parent->_parent = cur;
if (_root == parent)//等价于 ppnode == nullptr
{
_root = cur;
cur->_parent = nullptr;
}
else
{
cur->_parent = ppnode;
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
}
}
三.与AVL树的比较
红黑树和AVL树的插入效率O(logN),只是红黑树不像AVL追求如此平衡,所以旋转次数会少,并且实现也较简单。所以在实践中大都使用红黑树。之后我们还是使用红黑树模拟实现map和set。