环境
1、单片机:STM32F042F6P6
2、编译器:KeilMDK
3、配置工具:STM32CubeMX
目标
使用STM32的硬件IIC接口驱动高侧/低侧测量、双向电流/功率监视器INA226。
开始
1、配置STM32F042F6P6的IIC
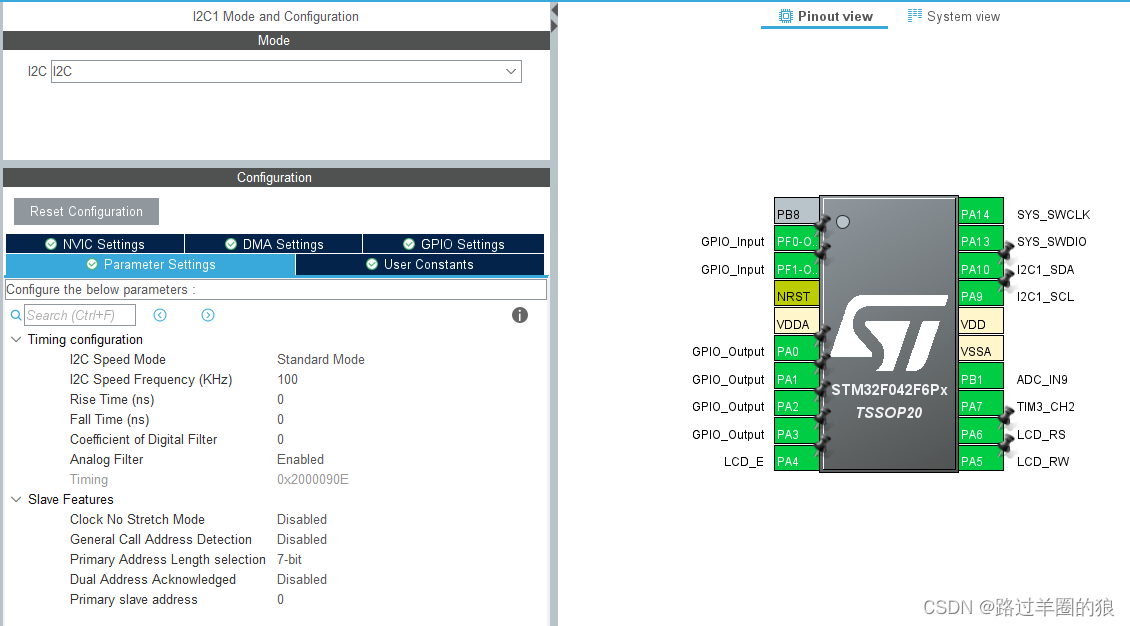
2、编写INA226的驱动
头文件:
#ifndef __INA226_H
#define __INA226_H
#include "main.h"
#define INA226_COM_PORT hi2c1 /*通讯使用的IIC接口*/
#define INA226_ADDRESS 0x80 /*INA226的地址*/
#define INA226_I2C_TIMEOUT 10 /*IIC通讯超时*/
#define INA226_CALIB_VAL 1024
#define INA226_CURRENTLSB 0.5F // mA/bit
#define INA226_CURRENTLSB_INV 1/INA226_CURRENTLSB // bit/mA
#define INA226_POWERLSB_INV 1/(INA226_CURRENTLSB*25) // bit/mW
#define INA226_CONFIG 0x00 // Configuration Register (R/W)初始值4127
#define INA226_SHUNTV 0x01 // Shunt Voltage (R)初始值0,分流电压测量值
#define INA226_BUSV 0x02 // Bus Voltage (R)初始值0,总线电压测量值
#define INA226_POWER 0x03 // Power (R)初始值0,输出功率测量值
#define INA226_CURRENT 0x04 // Current (R)初始值0,分流电阻电流计算值
#define INA226_CALIB 0x05 // Calibration (R/W),设置全量程和电流LSB
#define INA226_MASK 0x06 // Mask/Enable (R/W),报警设置和转换准备标志
#define INA226_ALERTL 0x07 // Alert Limit (R/W),报警阈值
#define INA226_MANUF_ID 0xFE // Manufacturer ID (R),0x5449
#define INA226_DIE_ID 0xFF // Die ID (R),0x2260
#define INA226_MODE_POWER_DOWN (0<<0) // Power-Down
#define INA226_MODE_TRIG_SHUNT_VOLTAGE (1<<0) // Shunt Voltage, Triggered
#define INA226_MODE_TRIG_BUS_VOLTAGE (2<<0) // Bus Voltage, Triggered
#define INA226_MODE_TRIG_SHUNT_AND_BUS (3<<0) // Shunt and Bus, Triggered
#define INA226_MODE_POWER_DOWN2 (4<<0) // Power-Down
#define INA226_MODE_CONT_SHUNT_VOLTAGE (5<<0) // Shunt Voltage, Continuous
#define INA226_MODE_CONT_BUS_VOLTAGE (6<<0) // Bus Voltage, Continuous
#define INA226_MODE_CONT_SHUNT_AND_BUS (7<<0) // Shunt and Bus, Continuous
// Shunt Voltage Conversion Time
#define INA226_VSH_140uS (0<<3)
#define INA226_VSH_204uS (1<<3)
#define INA226_VSH_332uS (2<<3)
#define INA226_VSH_588uS (3<<3)
#define INA226_VSH_1100uS (4<<3)
#define INA226_VSH_2116uS (5<<3)
#define INA226_VSH_4156uS (6<<3)
#define INA226_VSH_8244uS (7<<3)
// Bus Voltage Conversion Time (VBUS CT Bit Settings[6-8])
#define INA226_VBUS_140uS (0<<6)
#define INA226_VBUS_204uS (1<<6)
#define INA226_VBUS_332uS (2<<6)
#define INA226_VBUS_588uS (3<<6)
#define INA226_VBUS_1100uS (4<<6)
#define INA226_VBUS_2116uS (5<<6)
#define INA226_VBUS_4156uS (6<<6)
#define INA226_VBUS_8244uS (7<<6)
// Averaging Mode (AVG Bit Settings[9-11])
#define INA226_AVG_1 (0<<9)
#define INA226_AVG_4 (1<<9)
#define INA226_AVG_16 (2<<9)
#define INA226_AVG_64 (3<<9)
#define INA226_AVG_128 (4<<9)
#define INA226_AVG_256 (5<<9)
#define INA226_AVG_512 (6<<9)
#define INA226_AVG_1024 (7<<9)
// Reset Bit (RST bit [15])
#define INA226_RESET_ACTIVE (1<<15)
#define INA226_RESET_INACTIVE (0<<15)
// Mask/Enable Register
#define INA226_MER_SOL (1<<15) // Shunt Voltage Over-Voltage
#define INA226_MER_SUL (1<<14) // Shunt Voltage Under-Voltage
#define INA226_MER_BOL (1<<13) // Bus Voltagee Over-Voltage
#define INA226_MER_BUL (1<<12) // Bus Voltage Under-Voltage
#define INA226_MER_POL (1<<11) // Power Over-Limit
#define INA226_MER_CNVR (1<<10) // Conversion Ready
#define INA226_MER_AFF (1<<4) // Alert Function Flag
#define INA226_MER_CVRF (1<<3) // Conversion Ready Flag
#define INA226_MER_OVF (1<<2) // Math Overflow Flag
#define INA226_MER_APOL (1<<1) // Alert Polarity Bit
#define INA226_MER_LEN (1<<0) // Alert Latch Enable
#define INA226_MANUF_ID_DEFAULT 0x5449
#define INA226_DIE_ID_DEFAULT 0x2260
float INA226_GetBusV(void);
float INA226_GetCurrent(void);
float INA226_GetPower(void);
uint8_t INA226_SetConfig(uint16_t ConfigWord);
uint8_t INA226_SetCalibrationReg(uint16_t ConfigWord);
uint8_t INA226_SetMaskEnable(uint16_t ConfigWord);
uint8_t INA226_SetAlertLimit(uint16_t ConfigWord);
uint16_t INA226_GetConfig(void);
uint16_t INA226_GetShuntV(void);
uint16_t INA226_GetBusVReg(void);
uint16_t INA226_GetPowerReg(void);
uint16_t INA226_GetCalibrationReg(void);
uint16_t INA226_GetCurrentReg(void);
uint16_t INA226_GetManufID(void);
uint16_t INA226_GetDieID(void);
uint16_t INA226_GetMaskEnable(void);
uint16_t INA226_GetAlertLimit(void);
#endif
3、C文件
#include "ina226.h"
#include "i2c.h"
/*
**************************************************
* 说明:读取BUS电压,并转换为浮点数据
**************************************************
*/
float INA226_GetBusV(void)
{
uint16_t regData;
float fVoltage;
regData = INA226_GetBusVReg();
fVoltage = regData * 0.00125f;/*电压的LSB = 1.25mV*/
return fVoltage;
}
/*
**************************************************
* 说明:读取电流,并转换为浮点数据
**************************************************
*/
float INA226_GetCurrent()
{
uint16_t regData;
float fCurrent;
regData = INA226_GetCurrentReg();
if(regData >= 0x8000) regData = 0;
fCurrent = regData * 0.0002f;/*电流的LSB = 0.2mA,由用户配置*/
return fCurrent;
}
/*
**************************************************
* 说明:读取功率,并转换为浮点数据
**************************************************
*/
float INA226_GetPower()
{
uint16_t regData;
float fPower;
regData = INA226_GetPowerReg();
fPower = regData * 0.005f;/*功率的LSB = 电流的LSB*25*/
return fPower;
}
uint8_t INA226_SetConfig(uint16_t ConfigWord)
{
uint8_t SentTable[3];
SentTable[0] = INA226_CONFIG;
SentTable[1] = (ConfigWord & 0xFF00) >> 8;
SentTable[2] = (ConfigWord & 0x00FF);
return HAL_I2C_Master_Transmit(&INA226_COM_PORT, INA226_ADDRESS, SentTable, 3, INA226_I2C_TIMEOUT);
}
uint16_t INA226_GetConfig()
{
uint8_t SentTable[1] = {INA226_CONFIG};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetShuntV()
{
uint8_t SentTable[1] = {INA226_SHUNTV};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetBusVReg()
{
uint8_t SentTable[1] = {INA226_BUSV};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint8_t INA226_SetCalibrationReg(uint16_t ConfigWord)
{
uint8_t SentTable[3];
SentTable[0] = INA226_CALIB;
SentTable[1] = (ConfigWord & 0xFF00) >> 8;
SentTable[2] = (ConfigWord & 0x00FF);
return HAL_I2C_Master_Transmit(&INA226_COM_PORT, INA226_ADDRESS, SentTable, 3, INA226_I2C_TIMEOUT);
}
uint16_t INA226_GetCalibrationReg()
{
uint8_t SentTable[1] = {INA226_CALIB};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetPowerReg()
{
uint8_t SentTable[1] = {INA226_POWER};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetCurrentReg()
{
uint8_t SentTable[1] = {INA226_CURRENT};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetManufID()
{
uint8_t SentTable[1] = {INA226_MANUF_ID};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint16_t INA226_GetDieID()
{
uint8_t SentTable[1] = {INA226_DIE_ID};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint8_t INA226_SetMaskEnable(uint16_t ConfigWord)
{
uint8_t SentTable[3];
SentTable[0] = INA226_MASK;
SentTable[1] = (ConfigWord & 0xFF00) >> 8;
SentTable[2] = (ConfigWord & 0x00FF);
return HAL_I2C_Master_Transmit(&INA226_COM_PORT, INA226_ADDRESS, SentTable, 3, INA226_I2C_TIMEOUT);
}
uint16_t INA226_GetMaskEnable()
{
uint8_t SentTable[1] = {INA226_MASK};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
uint8_t INA226_SetAlertLimit(uint16_t ConfigWord)
{
uint8_t SentTable[3];
SentTable[0] = INA226_ALERTL;
SentTable[1] = (ConfigWord & 0xFF00) >> 8;
SentTable[2] = (ConfigWord & 0x00FF);
return HAL_I2C_Master_Transmit(&INA226_COM_PORT, INA226_ADDRESS, SentTable, 3, INA226_I2C_TIMEOUT);
}
uint16_t INA226_GetAlertLimit()
{
uint8_t SentTable[1] = {INA226_ALERTL};
uint8_t ReceivedTable[2];
HAL_I2C_Master_Transmit(&INA226_COM_PORT,INA226_ADDRESS, SentTable, 1, INA226_I2C_TIMEOUT);
if (HAL_I2C_Master_Receive(&INA226_COM_PORT,INA226_ADDRESS, ReceivedTable, 2, INA226_I2C_TIMEOUT) != HAL_OK) return 0xFF;
else return ((uint16_t)ReceivedTable[0]<<8 | ReceivedTable[1]);
}
4、使用前了解
回到main函数中,对INA226进行初始化,首先了解一下INA226的基础知识:
官方电路图如下:
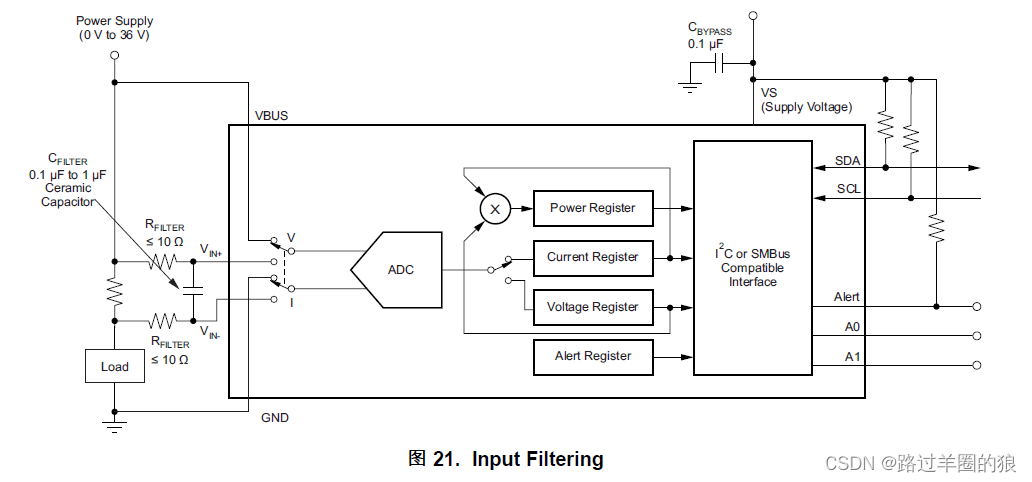
其中采样电阻我设置的是10mΩ。
它的寄存器有10个,每个的功能如下:
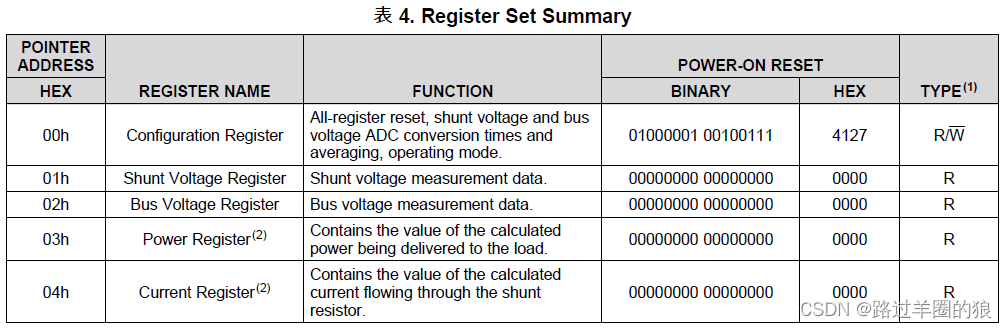
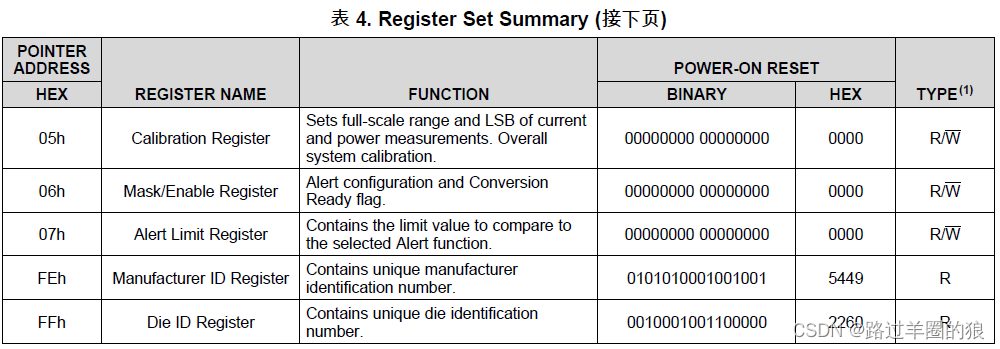
其中我们主要关注00h配置寄存器,05校准寄存器和02,03,04这三个只读的电压,电流,功率寄存器。
关于配置寄存器00h用于配置芯片的采样速度,采样模式,采样滤波周期等,默认值是0x4127。
关键在于校准寄存器05h的配置,官方给出了2个公式用于配置这个寄存器:
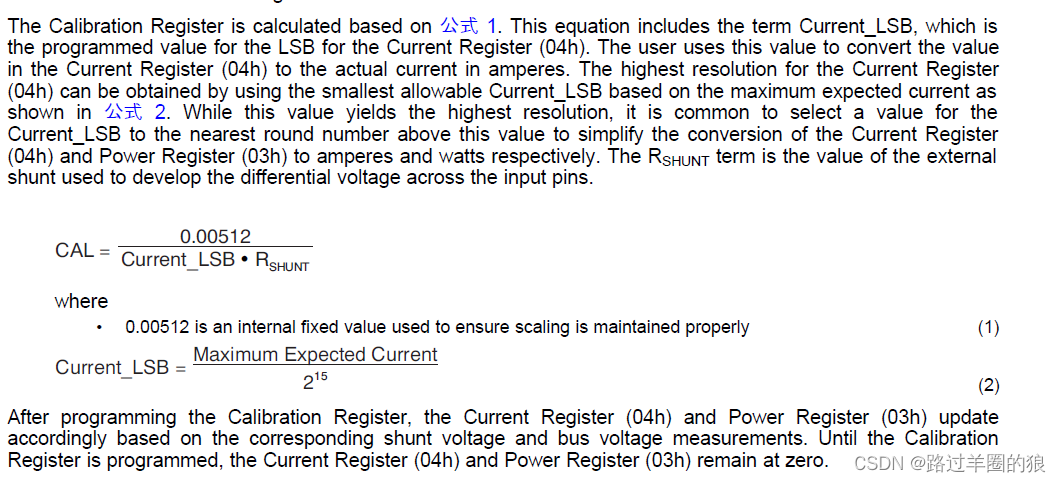
例如需要测量5A的电流,采样电阻为10mΩ,则
Current_LSB = 预期最大电流 / 2^15
Current_LSB = 5 / 32768 = 0.000152A ,选0.2ma
确定了Current_LSB后,计算校准值
CAL = 0.00512/(Current_LSBR)
CAL = 0.00512/(0.00020.01)=2560 = 0x0a00
OK,可以开始使用INA226了。
使用
在主函数中调用如下函数初始化:
/*
* 设置转换时间8.244ms,求平均值次数16,设置模式为分流和总线连续模式
* 总数据转换时间 = 8.244*16 = 131.9ms
*/
INA226_SetConfig(0x45FF);
/*
* 分流电阻最大电压 = 32768 * 0.0000025V = 0.08192V
* 设置分流电压转电流转换参数:电阻0.01R,分辨率0.2mA
* 公式1
* Current_LSB = 预期最大电流 / 2^15
* Current_LSB = 5 / 32768 = 0.000152A ,选0.2ma
* 公式2
* CAL = 0.00512/(Current_LSB*R)
* CAL = 0.00512/(0.0002*0.01)=2560 = 0x0a00
*/
INA226_SetCalibrationReg(0x0a00);
然后就可以读取INA226的测量值了:
fVoltage = INA226_GetBusV();
fCurrent = INA226_GetCurrent();
fPower = INA226_GetPower();
关于这3个函数,具体可以追踪进去,看函数说明:
/*
**************************************************
* 说明:读取BUS电压,并转换为浮点数据
**************************************************
*/
float INA226_GetBusV(void)
{
uint16_t regData;
float fVoltage;
regData = INA226_GetBusVReg();
fVoltage = regData * 0.00125f;/*电压的LSB = 1.25mV*/
return fVoltage;
}
/*
**************************************************
* 说明:读取电流,并转换为浮点数据
**************************************************
*/
float INA226_GetCurrent()
{
uint16_t regData;
float fCurrent;
regData = INA226_GetCurrentReg();
if(regData >= 0x8000) regData = 0;
fCurrent = regData * 0.0002f;/*电流的LSB = 0.2mA,由用户配置*/
return fCurrent;
}
/*
**************************************************
* 说明:读取功率,并转换为浮点数据
**************************************************
*/
float INA226_GetPower()
{
uint16_t regData;
float fPower;
regData = INA226_GetPowerReg();
fPower = regData * 0.005f;/*功率的LSB = 电流的LSB*25*/
return fPower;
}
展示
最后以几张图片结尾


误差可接受吧。







![java八股文面试[数据库]——JOIN优化](https://img-blog.csdnimg.cn/img_convert/f335b7779373f56acb2b278b55ee6343.png)