ceph数据修复
当PG完成了Peering过程后,处于Active状态的PG就可以对外提供服务了。如果该PG的各个副本上有不一致的对象,就需要进行修复。
Ceph的修复过程有两种:Recovery和Backfill。
Recovery是仅依据PG日志中的缺失记录来修复不一致的对象。
Backfill是PG通过重新扫描所有的对象,对比发现缺失的对象,通过整体拷贝来修复。当一个OSD失效时间过长导致无法根据PG日志来修复,或者新加入的OSD导致数据迁移时,就会启动Backfill过程。
PG完成Peering过程后,就处于activate状态,如果需要Recovery,就产生DoRecovery事件,触发修复操作。如果需要Backfill,则会产生RequestBackfill事件来触发Backfill操作。在PG的修复过程中,如果既有需要Recovery过程的OSD,又有需要Backfill过程的OSD,那么处理过程需要先进行Recovery过程的修复,再完成Backfill过程的修复。
本章介绍Ceph的数据修复的实现过程。首先介绍数据修复的资源预约的知识,然后通过介绍修复的状态转换图,大概了解整个数据修复的过程。最后分别详细介绍Recovery过程和Backfill过程的具体实现。
1. 资源预约
在数据修复的过程中,为了控制一个OSD上正在修复的PG最大数目,需要资源预约,在主OSD上和从OSD上都需要预约。如果没有预约成功,需要阻塞等待。一个OSD能同时修复的最大PG数在配置选项osd_max_backfills中设置,默认值为1。
类AsyncReserver用来管理资源预约,其模板参数<T>为要预约的资源类型。该类实现了异步的资源预约。当成功完成资源预约后,就调用注册的回调函数通知调用方预约成功(src/common/AsyncReserver.h):
template <typename T>
class AsyncReserver {
Finisher *f; //当预约成功,用来执行的回调函数
unsigned max_allowed; //定义允许的最大资源数量,在这里指允许修复的PG的数量
unsigned min_priority; //最小的优先级
Mutex lock;
//优先级到待预约资源链表的映射,pair<T, Context *>定义预约的资源和注册的回调函数
map<unsigned, list<pair<T, Context*> > > queues;
//资源在queues链表中的位置指针
map<T, pair<unsigned, typename list<pair<T, Context*> >::iterator > > queue_pointers;
//预约成功,正在使用的资源
set<T> in_progress;
};1.1 资源预约
函数request_reservation()用于预约资源:
/**
* Requests a reservation
*
* Note, on_reserved may be called following cancel_reservation. Thus,
* the callback must be safe in that case. Callback will be called
* with no locks held. cancel_reservation must be called to release the
* reservation slot.
*/
void request_reservation(
T item, ///< [in] reservation key
Context *on_reserved, ///< [in] callback to be called on reservation
unsigned prio
) {
Mutex::Locker l(lock);
assert(!queue_pointers.count(item) &&
!in_progress.count(item));
queues[prio].push_back(make_pair(item, on_reserved));
queue_pointers.insert(make_pair(item, make_pair(prio,--(queues[prio]).end())));
do_queues();
}
具体处理过程如下:
1) 把要请求的资源根据优先级添加到queue队列中,并在queue_pointers中添加其对应的位置指针:
queues[prio].push_back(make_pair(item, on_reserved));
queue_pointers.insert(make_pair(item, make_pair(prio,--(queues[prio]).end())));2) 调用函数do_queues()用来检查queue中的所有资源预约申请:从优先级高的请求开始检查,如果还有配额并且其请求的优先级至少不小于最小优先级,就把资源授权给它。
3) 在queue队列中删除该资源预约请求,并在queue_ponters删除该资源的位置信息。把该资源添加到in_progress队列中,并把请求相应的回调函数添加到Finisher类中,使其执行该回调函数。最后通知预约成功。
1.2 取消预约
函数cancle_reservation()用于释放拥有的不再使用的资源:
/**
* Cancels reservation
*
* Frees the reservation under key for use.
* Note, after cancel_reservation, the reservation_callback may or
* may not still be called.
*/
void cancel_reservation(
T item ///< [in] key for reservation to cancel
) {
Mutex::Locker l(lock);
if (queue_pointers.count(item)) {
unsigned prio = queue_pointers[item].first;
delete queue_pointers[item].second->second;
queues[prio].erase(queue_pointers[item].second);
queue_pointers.erase(item);
} else {
in_progress.erase(item);
}
do_queues();
}具体处理过程如下:
1) 如果该资源还在queue队列中,就删除(这属于异常情况的处理);否则再in_progress队列中删除该资源
2) 调用do_queues()函数把该资源重新授权给其他等待的请求。
2. 数据修复状态转换图
如下图11-1所示的是修复过程状态转换图。当PG进入Active状态后,就进入默认的子状态Activating:
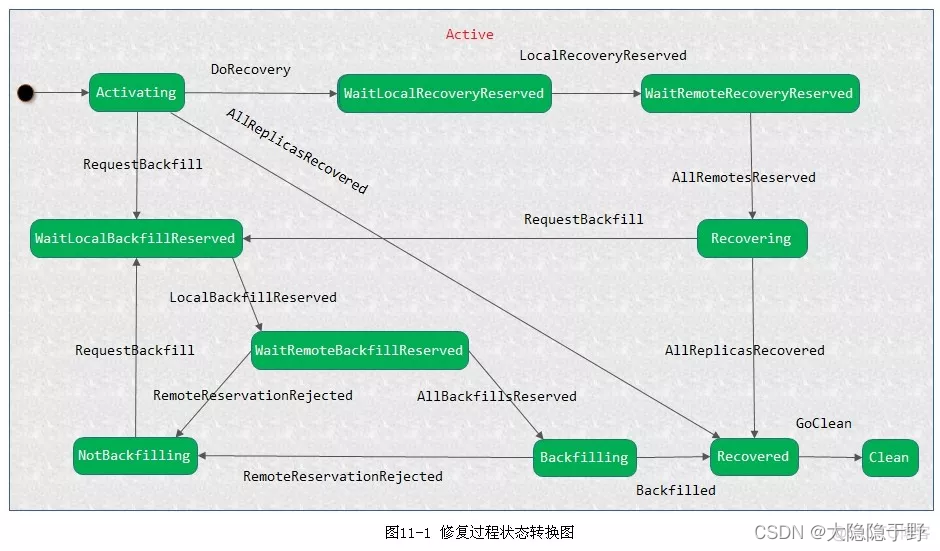
数据修复的状态转换过程如下所示:
**情况1:**当进入Activating状态后,如果此时所有的副本都完整,不需要修复,其状态转移过程如下:
1) Activating状态接收到AllReplicasRecovered事件,直接转换到Recovered状态
2) Recovered状态接收到GoClean事件,整个PG转入Clean状态
情况2: 当进入Activating状态后,没有Recovery过程,只需要Backfill过程的情况:
1) Activating状态直接接收到RequestBackfill事件,进入WaitLocalBackfillReserved状态;
2) 当WaitLocalBackfillReserved状态接收到LocalBackfillReserved事件后,意味着本地资源预约成功,转入WaitRemoteBackfillReserved;
3) 所有副本资源预约成功后,主PG就会接收到AllBackfillsReserved事件,进入Backfilling状态,开始实际数据Backfill操作过程;
4) Backfilling状态接收到Backfilled事件,标志Backfill过程完成,进入Recovered状态;
5) 异常处理:当在状态WaitRemoteBackfillReserved和Backfilling接收到RemoteReservationRejected事件,表明资源预约失败,进入NotBackfilling状态,再次等待RequestBackfilling事件来重新发起Backfill过程;
**情况3:**当PG既需要Recovery过程,也可能需要Backfill过程时,PG先完成Recovery过程,再完成Backfill过程,特别强调这里的先后顺序。其具体过程如下:
1) Activating状态:在接收到DoRecovery事件后,转移到WaitLocalRecoveryReserved状态;
2) WaitLocalRecoveryReserved状态:在这个状态中完成本地资源的预约。当收到LocalRecoveryReserved事件后,标志着本地资源预约的完成,转移到WaitRemoteRecoveryReserved状态;
3) WaitRemoteRecoveryReserved状态:在这个状态中完成远程资源的预约。当接收到AllRemotesReserved事件,标志着该PG在所有参与数据修复的从OSD上完成资源预约,进入Recoverying状态;
4) Recoverying状态:在这个状态完成实际的数据修复工作。完成后把PG设置为PG_STATE_RECOVERING状态,并把PG添加到recovery_wq工作队列中,开始启动数据修复:
PG::RecoveryState::Recovering::Recovering(my_context ctx)
: my_base(ctx),
NamedState(context< RecoveryMachine >().pg->cct, "Started/Primary/Active/Recovering")
{
context< RecoveryMachine >().log_enter(state_name);
PG *pg = context< RecoveryMachine >().pg;
pg->state_clear(PG_STATE_RECOVERY_WAIT);
pg->state_set(PG_STATE_RECOVERING);
pg->publish_stats_to_osd();
pg->osd->queue_for_recovery(pg);
}
在Recoverying状态完成Recovery工作后,如果需要Backfill工作,就接收RequestBackfill事件,转入Backfill流程;
6) 如果没有Backfill工作流程,直接接收AllReplicasRecovered事件,转入Recovered状态;
7) Recovered状态:到达本状态,意味着已经完成数据修复工作。当收到事件GoClean后,PG就进入clean状态。
3. Recovery过程
数据修复的依据是在Peering过程中产生的如下信息:
主副本上的缺失对象的信息保存在pg_log类的pg_missing_t结构中;
各从副本上的缺失对象信息保存在OSD对应的peer_missing中的pg_missing_t结构中;
缺失对象的位置信息保存在类MissingLoc中
根据以上信息,就可以知道该PG里各个OSD缺失的对象信息,以及该缺失的对象目前在哪些OSD上有完整的信息。
基于上面的信息,数据修复过程就相对比较清晰:
对于主OSD缺失的对象,随机选择一个拥有该对象的OSD,把数据拉取过来;
对于replica缺失的对象,从主副本上把缺失的对象数据推送到从副本上来完成数据的修复;
对于比较特殊的快照对象,在修复时加入了一些优化的方法;
3.1 触发修复
Recovery过程由PG的主OSD来触发并控制整个修复的过程。在修复的过程中,先修复主OSD上缺失(或者不一致)的对象,然后修复从OSD上缺失的对象。由数据修复状态转换过程可知,当PG处于Activate/Recoverying状态后,该PG被加入到OSD的RecoveryWQ工作队列中。在recovery_wq里,其工作队列的线程池的处理函数调用do_recovery()函数来执行实际的数据修复操作:
void OSD::do_recovery(PG *pg, ThreadPool::TPHandle &handle);函数do_recovery()由RecoveryWQ工作队列的线程池的线程执行。其输入的参数为要修复的PG,具体处理流程如下:
1) 配置选项osd_recovery_sleep设置了线程做一次修复后的休眠时间。如果设置了该值,每次线程开始先休眠相应的时间长度。该参数默认值为0,不需要休眠。
2) 加入recovery_wq.lock()锁,用来保护recovery_wq队列以及变量recovery_ops_active。计算可修复对象的max值,其值为允许修复的最大对象数osd_recovery_max_active减去正在修复的对象数recovery_ops_active,然后调用函数recovery_wq.unlock()解锁;
3) 如果max小于等于0,即没有修复对象的配额,就把PG重新加入工作队列recovery_wq中并返回;否则如果max大于0,调用pg->lock_suspend_timeout(handle)重新设置线程超时时间。检查PG的状态,如果该PG处于正在被删除的状态,或者既不处于peered状态,也不是主OSD,则直接退出;
4) 调用函数pg->start_recovery_ops()修复,返回值more为还需要修复的对象数目。输出参数started为已经开始修复的对象数。
5) 如果more为0,也就是没有修复的对象了。但是pg->have_unfound()不为0,还有unfound对象(即缺失的对象,目前不知道在哪个OSD上能找到完整的对象),调用函数discover_all_missing()在might_have_unfound队列中的OSD上继续查找该对象,查找的方法就是给相关的OSD发送获取OSD的pg_log的消息。
6) 如果rctx.query_map->empty()为空,也就是没有找到其他OSD去获取pg_log来查找unfound对象,就结束该PG的recover操作,调用函数从recovery_wq._dequeue(pg)删除PG;
7) 函数dispatch_context()做收尾工作,在这里发送query_map的请求,把ctx.transaction的事务提交到本地对象存储中。
由上过程分析可知,do_recovery()函数的核心功能是计算要修复对象的max值,然后调用函数start_recovery_ops()来启动修复。
3.2 ReplicatedPG
类ReplicatedPG用于处理Replicate类型PG的相关修复操作。下面分析它用于修复的start_recovery_ops()函数及其相关函数的具体实现。
3.2.1 start_recovery_ops()
函数start_recovery_ops()调用recovery_primary()和recovery_replicas()来修复该PG上对象的主副本和从副本。修复完成后,如果仍需要Backfill过程,则抛出相应事件触发PG状态机,开始Backfill的修复进程。
bool ReplicatedPG::start_recovery_ops(
int max, ThreadPool::TPHandle &handle,
int *ops_started);
该函数具体处理过程如下:
1) 首先检查OSD,确保该OSD是PG的主OSD。如果PG已经处于PG_STATE_RECOVERING或者PG_STATE_BACKFIL的状态则退出;
2) 从pg_log获取missing对象,它保存了主OSD缺失的对象。参数num_missing为主OSD缺失的对象数目;num_unfound为该PG上缺失的对象却没有找到该对象其他正确副本所在的OSD;如果num_missing为0,说明主OSD不缺失对象,直接设置info.last_complete为最新版本info.last_update的值;
3) 如果num_missing等于num_unfound,说明主OSD所缺失对象都为unfound类型的对象,先调用函数recover_replicas()启动修复replica上的对象;
4) 如果started为0,也就是已经启动修复的对象数量为0,调用函数recover_primary()修复主OSD上的对象;
5) 如果started仍然为0,且num_unfound有变化,再次启动recover_replicas()修复副本;
6) 如果started不为0,设置work_in_progress的值为true;
7) 如果recovering队列为空,也就是没有正在进行Recovery操作的对象,状态为PG_STATE_BACKFILL,并且backfill_targets不为空,started小于max,missing.num_missing()为0的情况下:
a) 如果标志get_osdmap()->test_flag(CEPH_OSDMAP_NOBACKFILL)设置了,就推迟Backfill过程;
b) 如果标志CEPH_OSDMAP_NOREBALANCE设置了,且是degrade的状态,推迟Backfill过程;
c) 如果backfill_reserved没有设置,就抛出RequestBackfill事件给状态机,启动Backfill过程;
d) 否则,调用函数recover_backfill()开始Backfill过程
8) 最后PG如果处于PG_STATE_RECOVERING状态,并且对象修复成功,就检查:如果需要Backfill过程,就向PG的状态机发送RequestBackfill事件;如果不需要Backfill过程,就抛出AllReplicasRecovered事件;
9) 否则,PG的状态就是PG_STATE_BACKFILL状态,清除该状态,抛出Backfilled事件;
3.2.2 recover_primary()
函数recover_primary()用来修复一个PG的主OSD上缺失的对象:
int ReplicatedPG::recover_primary(int max, ThreadPool::TPHandle &handle);其处理过程如下:
1) 调用pgbackend->open_recovery_op()返回一个PG类型相关的PGBackend::RecoveryHandle。对于ReplicatedPG对应的RPGHandle,内部有两个map,保存了Push和Pull操作的封装PushOp和PullOp:
struct RPGHandle : public PGBackend::RecoveryHandle {
map<pg_shard_t, vector<PushOp> > pushes;
map<pg_shard_t, vector<PullOp> > pulls;
};
2) last_requested为上次修复的指针,通过调用low_bound()函数来获取还没有修复的对象。
3) 遍历每一个未被修复的对象:latest为日志记录中保存的该缺失对象的最后一条日志,soid为缺失的对象。如果latest不为空:
a) 如果该日志记录是pg_log_entry_t::CLONE类型,这里不做任何的特殊处理,直到成功获取snapshot相关的信息SnapSet后再处理;
b) 如果该日志记录类型为pg_log_entry_t::LOST_REVERT类型:该revert操作为数据不一致时,管理员通过命令行强行回退到指定版本,reverting_to记录了回退的版本:
如果item.have等于latest->reverting_to版本,也就是通过日志记录显示当前已经拥有回退的版本,那么就获取对象的ObjectContext,如果检查对象当前的版本obc->obs.io.version等于latest->version,说明该回退操作完成;
如果item.have等于latest->reverting_to,但是对象当前的版本obc->obs.io.version不等于latest->version,说明没有执行回退操作,直接修改对象的版本号为latest->version即可。
否则,需要拉取该reverting_to版本的对象,这里不做特殊的处理,只是检查所有OSD是否拥有该版本的对象,如果有就加入到missing_loc记录该版本的位置信息,由后续修复继续来完成。
c) 如果该对象在recovering过程中,表明正在修复,或者其head对象正在修复,跳过,并计数增加skipped;否则调用函数recover_missing()来修复。
4) 调用函数pgbackend->run_recovery_op(),把PullOp或者PushOp封装的消息发送出去;
下面举例说明,当最后的日志记录类型为LOST_REVERT时的修复过程:
例11-1 日志修复过程
PG日志的记录如下: 每个单元代表一条日志记录,分别为对象的名字和版本以及操作,版本的格式为(epoch, version)。灰色的部分代表本OSD上缺失的日志记录,该日志记录是从权威日志记录中拷贝过来的,所以当前该日志记录是连续完整的。

情况1: 正常情况的修复
缺失的对象列表为[obj1,obj2]。当前修复对象为obj1.由日志记录可知,对象obj1被修改过三次,分别为版本6,7,8。当前拥有的obj1对象的版本have值为4,修复时只修复到最后修改的版本8即可。
情况2: 最后一个操作为LOST_REVERT类型的操作

对于要修复的对象obj1,最后一次操作为LOST_REVERT类型的操作,该操作当前版本version为8,修改前的版本prior_version为7,回退版本reverting_to为4。
在这种情况下,日志显示当前已经有版本4,检查对象obj1的实际版本,也就是object_info里保存的版本号:
1) 如果该值是8,说明最后一次revert操作成功,不需要做任何修复动作;
2) 如果该值是4,说明LOST_REVERT操作就没有执行。当然数据内容已经是版本4了,只需要修改object_info的版本为8即可。
如果回退的版本reverting_to不是版本4,而是版本6,那么最终还是需要把obj1的数据修复到版本6的数据。Ceph在这里的处理,仅仅是检查其他OSD缺失的对象中是否有版本6,如果有,就加入到missing_loc中,记录拥有该版本的OSD位置,待后续继续修复。
3.2.3 recover_missing()
函数recover_missing()处理snap对象的修复。在修复snap对象时,必须首先修复head对象或者snapdir对象,获取SnapSet信息,然后才能修复快照对象自己。
int ReplicatedPG::recover_missing(
const hobject_t &soid, eversion_t v,
int priority,
PGBackend::RecoveryHandle *h);
具体实现如下:
1) 检查如果对象soid时unfound,直接返回PULL_NONE值。暂时无法修复处于unfound的对象
2) 如果修复的是snap对象:
a) 查看如果对应的head对象处于missing,递归调用函数recover_missing()先修复head对象;
b) 查看如果snapdir对象处于missing,就递归调用函数recover_missing()先修复snapdir对象;
从head对象或者snapdir对象中获取head_obc信息;
4) 调用函数pgbackend->recover_object()把要修复的操作信息封装到PullOp或者PushOp对象中,并添加到RecoveryHandle结构中。
3.3 pgbackend
pgbackend封装了不同类型的Pool的实现。ReplicatedBackend实现了replicate类型的PG相关的底层功能,ECBackend实现了Erasure code类型的PG相关的底层功能。
由上一节3.2的分析可知,需要调用pgbackend的recover_object()函数来实现修复对象的信息封装。这里只介绍基于副本的。
函数recover_object()实现了pull操作,调用prepare_pull()函数把请求封装成PullOp结构。如果是push操作,就调用start_pushes()把请求封装成PushOp的操作。
3.3.1 pull操作
prepare_pull()函数把要拉取的object相关的操作信息打包成PullOp类信息,如下所示:
void ReplicatedBackend::prepare_pull(
eversion_t v, //要拉取对象的版本信息
const hobject_t& soid, //要拉取的对象
ObjectContextRef headctx, //拉取对象的ObjectContext信息
RPGHandle *h); //封装后保存的RecoveryHandle
难点在于snap对象的修复处理过程。下面先介绍PullOp数据结构。
PullOp数据结构如下(src/osd/osd_types.h):
struct PullOp {
hobject_t soid; //需要拉取的对象
ObjectRecoveryInfo recovery_info; //需要修复的信息
ObjectRecoveryProgress recovery_progress; //对象修复进度信息
};
struct ObjectRecoveryInfo {
hobject_t soid; //修复的对象
eversion_t version; //修复对象的版本
uint64_t size; //修复对象的大小
object_info_t oi; //修复对象的object_info信息
SnapSet ss; //修复对象的快照信息
//对象需要拷贝的集合,在修复快照对象时,需要从别的OSD拷贝到本地的对象的区段集合
interval_set<uint64_t> copy_subset;
//clone对象修复时,需要从本地对象拷贝来修复的区间
map<hobject_t, interval_set<uint64_t>, hobject_t::BitwiseComparator> clone_subset;
};
struct ObjectRecoveryProgress {
uint64_t data_recovered_to; //数据已经修复的位置指针
string omap_recovered_to; //omap已经修复的位置指针
bool first; //是否是首次修复操作
bool data_complete; //数据是否修复完成
bool omap_complete; //omap是否修复完成
};
函数prepare_pull()具体处理过程如下:
1) 通过调用函数get_parent()来获取PG对象的指针。pgbackend的parent就是相应的PG对象。通过PG获取missing、peer_missing、missing_loc等信息;
2) 从soid对象对应的missing_loc的map中获取该soid对象所在的OSD集合。把该集合保存在shuffle这个向量中。调用random_shuffle操作对OSD列表随机排序,然后选择向量中首个OSD作为缺失对象来拉取源OSD的值。从这一步可知,当修复主OSD上的对象,而多个从OSD上有该对象时,随机选择其中一个源OSD来拉取。
3) 当选择了一个源shard之后,查看该shard对应的peer_missing来确保该OSD上不缺失该对象,即确实拥有该版本的对象。
4) 确定拉取对象的数据范围:
a) 如果是head对象,直接拷贝对象的全部,在copy_subset()加入区间(0,-1),表示全部拷贝,最后设置size为-1:
recovery_info.copy_subset.insert(0, (uint64_t)-1);
recovery_info.size = ((uint64_t)-1);
b) 如果该对象是snap对象,确保head对象或者snapdir对象二者必须存在一个。如果headctx不为空,就可以获取SnapSetContext对象,它保存了snapshot相关的信息。调用函数calc_clone_subsets()来计算需要拷贝的数据范围。
5) 设置PullOp的相关字段,并添加到RPGHandle中
函数calc_clone_subsets()用于修复快照对象。在介绍它之前,这里需要介绍SnapSet的数据结构和clone对象的overlap概念。
在SnapSet结构中,字段clone_overlap保存了clone对象和上一次clone对象的重叠部分:
struct SnapSet {
snapid_t seq;
bool head_exists;
vector<snapid_t> snaps; // 序号降序排列
vector<snapid_t> clones; // 序号升序排列
//写操作导致的和最新的克隆对象重叠的部分
map<snapid_t, interval_set<uint64_t> > clone_overlap;
map<snapid_t, uint64_t> clone_size;
};
下面通过一个示例来说明clone_overlap数据结构的概念。
例11-2 clone_overlap数据结构如图11-2所示:

snap3从snap2对象clone出来,并修改了区间3和4,其在对象中范围的offset和length为(4,8)和(8,12)。那么在SnapSet的clone_overlap中就记录:
clone_overlap[3] = {(4,8), (8,12)}
函数calc_clone_subset()用于修复快照对象时,计算应该拷贝的数据区间。在修复快照对象时,并不是完全拷贝快照对象,这里用于优化的关键在于:快照对象之间是有数据重叠,数据重叠的部分可以通过已存在的本地快照对象的数据拷贝来修复;对于不能通过本地快照对象拷贝修复的部分,才需要从其他副本上拉取对应的数据。
函数calc_clone_subsets()具体实现如下:
首先获取该快照对象的size,把(0,size)加入到data_subset中:
data_subset.insert(0, size);
2) 向前查找(oldest snap)和当前快照相交的区间,直到找到一个不缺失的快照对象,添加到clone_subset中。这里找的不重叠区间,是从不缺失快照对象到当前修复的快照对象之间从没修改过的区间,所以修复时,直接从已存在的快照对象拷贝所需区间数据即可。
3) 同理,向后查找(newest snap)和当前快照对象相重叠的对象,直到找到一个不缺失的对象,添加到clone_subset中。
4) 去除掉所有重叠的区间,就是需要拉取的数据区间;
data_subset.subtract(cloning);
对于上述算法,下面举例来说明:
例11-3 快照对象修复示例如图11-3所示:

要修复的对象为snap4,不同长度代表各个clone对象的size是不同的,其中深红色的区间代表clone后修改的区间。snap2、snap3和snap5都是已经存在的非缺失对象。
算法处理流程如下:
1) 向前查找和snap4重叠的区间,直到遇到非缺失对象snap2为止。从snap4到snap2一直重叠的区间为1,5,8三个区间。因此,修复对象snap4时,修复1,5,8区间的数据,可以直接从已存在的本地非缺失对象snap2拷贝即可。
2) 同理,向后查找和snap4重叠的区间,直到遇到非缺失对象snap5为止。snap5和snap4重叠的区间为1,2,3,4,7,8六个区间。因此,修复对象4时,直接从本地对象snap4中拷贝区间1,2,3,4,7,8即可。
3) 去除上述本地就可修复的区间,对象snap4只有区间6需要从其他OSD上拷贝数据来修复。
3.3.2 push操作
函数start_pushes()获取actingbackfill的OSD列表,通过peer_missing查找缺失该对象的OSD,调用prep_push_to_replica()打包PushOp请求。
函数prep_push_to_replica()函数实现过程如下:
void ReplicatedBackend::prep_push_to_replica(
ObjectContextRef obc, const hobject_t& soid, pg_shard_t peer,
PushOp *pop, bool cache_dont_need);
如果需要push的对象是snap对象:检查如果head对象缺失,调用prep_push()推送head对象;如果是headdir对象缺失,则调用prep_push()推送headdir对象;
2) 如果是snap对象,调用函数calc_clone_subsets()来计算需要推送的快照对象的数据区间;
3) 如果是head对象,调用函数calc_head_subsets()来计算需要推送的head对象的区间,其原理和计算快照对象类似,这里就不详细说明了。最后调用prep_push()封装PushInfo信息,在函数build_push_op()里读取要push的实际数据。
3.3.3 处理修复操作
函数run_recover_op()调用send_pushed()函数和send_pulls()函数把请求发送给相关的OSD,这个流程比较简单。
当主OSD把对象推送给缺失该对象的从OSD后,从OSD需要调用函数handle_push()来实现数据写入工作,从而完成该对象的修复。同样,当主OSD给从OSD发起拉取对象的请求来修复自己缺失的对象时,需要调用函数handle_pulls()来处理该请求的应对。
在函数ReplicatedBackend::handle_push()里处理handle_push的请求,主要调用submit_push_data()函数来写入数据。
handle_pull()函数收到一个PullOp操作,返回PushOp操作,处理流程如下:
void ReplicatedBackend::handle_pull(pg_shard_t peer, PullOp &op, PushOp *reply)
{
const hobject_t &soid = op.soid;
struct stat st;
int r = store->stat(ch, ghobject_t(soid), &st);
if (r != 0) {
get_parent()->clog_error() << get_info().pgid << " "
<< peer << " tried to pull " << soid
<< " but got " << cpp_strerror(-r) << "\n";
prep_push_op_blank(soid, reply);
} else {
ObjectRecoveryInfo &recovery_info = op.recovery_info;
ObjectRecoveryProgress &progress = op.recovery_progress;
if (progress.first && recovery_info.size == ((uint64_t)-1)) {
// Adjust size and copy_subset
recovery_info.size = st.st_size;
recovery_info.copy_subset.clear();
if (st.st_size)
recovery_info.copy_subset.insert(0, st.st_size);
assert(recovery_info.clone_subset.empty());
}
r = build_push_op(recovery_info, progress, 0, reply);
if (r < 0)
prep_push_op_blank(soid, reply);
}
}
首先调用store->stat()函数,验证该对象是否存在,如果不存在,则调用函数prep_push_op_blank(),直接返回空值;
2) 如果该对象存在,获取ObjectRecoveryInfo和ObjectRecoveryProgress结构。如果progress.first为true并且recovery_info.size为-1,说明是全拷贝修复:将recovery_info.size设置为实际对象的size,清空recovery_info.copy_subset,并把(0,size)区间添加到recovery_info.copy_subset.insert(0, st.st_size)的拷贝区间。
3) 调用函数build_push_op(),构建PullOp结构。如果出错,调用prep_push_op_blank(),直接返回空值。
函数build_push_op()完成构建push的请求。具体处理如下:
int ReplicatedBackend::build_push_op(const ObjectRecoveryInfo &recovery_info,
const ObjectRecoveryProgress &progress,
ObjectRecoveryProgress *out_progress,
PushOp *out_op,
object_stat_sum_t *stat,
bool cache_dont_need);
如果progress.first为true,就需要获取对象的元数据信息。通过store->omap_get_header()获取omap的header信息,通过store->getattrs()获取对象的扩展属性信息,并验证oi.version是否为recovery_info.version;否则返回-EINVAL值。如果成功,new_progress.first设置为false。
2) 上一步只是获取了omap的header信息,并没有获取omap信息。这一步首先判断progress.omap_complete是否完成(初始化设置为false),如果没有完成,就迭代获取omap的(key,value)信息,并检查一次获取信息的大小不能超过cct->_conf->osd_recovery_max_chunk设置的值(默认为8MB)。特别需要注意的是,当该配置参数的值小于一个对象的size时,一个对象的修复需要多次数据的push操作。为了保证数据的完整一致性,先把数据拷贝到PG的temp存储空间。当拷贝完成之后,再移动到该PG的实际空间中。
3) 开始拷贝数据:检查recovery_info.copy_subset,也就是拷贝的区间;
4) 调用函数store->fiemap()来确定有效数据的区间out_op->data_included的值,通过store->read()读取相应的数据到data里。
5) 设置PullOp的相关字段,并返回。
4. Backfill过程
当PG完成了Recovery过程之后,如果backfill_targets不为空,表明有需要Backfill过程的OSD,就需要启动Backfill的任务,来完成PG的全部修复。下面介绍Backfill过程相关的数据结构和具体处理过程。
4.1 相关数据结构
数据结构BackfillInterval用来记录每个peer上的Backfill过程(src/osd/pg.h)。
struct BackfillInterval {
//一个peer的backfill_interval信息
eversion_t version; //扫描时的最新对象版本
map<hobject_t,eversion_t,hobject_t::Comparator> objects;
bool sort_bitwise;
hobject_t begin;
hobject_t end;
};
其字段说明如下:
version: 记录扫描对象列表时,当前PG对象更新的最新版本,一般为last_update,由于此时PG处于active状态,可能正在进行写操作。其用来检查从上次扫描到现在是否有对象写操作。如果有,完成写操作的对象在已扫描的对象列表中,进行Backfill操作时,该对象就需要更新为最新版本。
objects: 扫描到准备进行Backfill操作的对象列表;
begin: 当前处理的对象;
end: 本次扫描对象的结束,用于作为下次扫描对象的开始:
4.2 Backfill的具体实现
函数recovery_backfill()作为Backfill过程的核心函数,控制整个Backfill修复进程。其工作流程如下。
1) 初始设置
在函数on_activate()里设置了PG的属性值new_backfill为true,设置了last_backfill_started为earliest_backfill()的值。该函数计算需要backfill的OSD中,peer_info信息里保存的last_backfill的最小值。
peer_backfill_info的map中保存各个需要backfill的OSD所对应backfillInterval对象信息。首先初始化begin和end都为peer_info.last_backfill,由PG的Peering过程可知,在函数activate()里,如果需要Backfill的OSD,设置该OSD的peer_info的last_backfill为hobject_t(),也就是MIN对象。
backfills_inf_flight保存了正在进行Backfill操作的对象,pending_backfill_updates保存了需要删除的对象。
2) 设置backfill_info.begin为last_backfill_started,调用函数update_range()来更新需要进行Backfill操作的对象列表;
3) 根据各个peer_info的last_backfill对应的backfillInterval信息进行trim操作。根据last_backfill_started来更新backfill_info里相关字段;
4) 如果backfill_info.begin小于等于earliest_peer_backfill(),说明需要继续扫描更多的对象,backfill_info重新设置,这里特别注意的是,backfill_info的version字段也重新设置为(0,0),这会导致在随后调用的update_scan()函数再调用scan_range()函数来扫描对象;
5) 进行比较,如果pbi.begin小于backfill_info.begin,需要向各个OSD发送MOSDPGScan::OP_SCAN_GET_DIGEST消息来获取该OSD目前拥有的对象列表;
6) 当获取所有OSD的对象列表后,就对比当前主OSD的对象列表来进行修复。
7) check对象指针,就是当前OSD中最小的需要进行Backfill操作的对象:
a) 检查check对象,如果小于backfill_info.begin,就需要在各个需要Backfill操作的OSD上删除该对象,加入到to_remove队列中;
b) 如果check对象大于或者等于backfill_info.begin,检查拥有check对象的OSD,如果版本不一致,加入need_ver_targ中。如果版本相同,就加入keep_ver_targs中。
c) 那些begin对象不是check对象的OSD,如果pinfo.last_backfill小于backfill_info.begin,那么,该对象缺失,加入missing_targs列表中;
d) 如果pinfo.last_backfill大于backfill_info.begin,说明该OSD修复的进度已经超越当前的主OSD指示的修复进度,加入skip_targs中;
8) 对于keep_ver_targs列表中的OSD,不做任何操作。对于need_ver_targs和missing_targs中的OSD,该对象需要加入到to_push中去修复。
9) 调用函数send_remove_op()给OSD发送删除的消息来删除to_remove中的对象;
10) 调用函数prep_backfill_object_push()把操作打包成PushOp,调用函数pgbackend->run_recovery_op()把请求发送出去。其流程和Recovery流程类似。
11) 最后用new_last_backfill更新各个OSD的pg_info的last_backfill值。如果pinfo.last_backfill为MAX,说明backfill操作完成,给该OSD发送MOSDPGBackfill::OP_BACKFILL_FINISH消息;否则发送MOSDPGBackfill::OP_BACKFILL_PROGRESS来更新各个OSD上的pg_info的last_backfill字段。
下面举例说明。
例11-4 如下图11-4所示,该PG分布在5个OSD上(也就是5个副本,这里为了方便列出各种处理情况),每一行上的对象列表都是相应OSD当前对应backfillInterval的扫描对象列表。osd5为主OSD,是权威的对象列表,其他OSD都对照主OSD上的对象列表来修复。
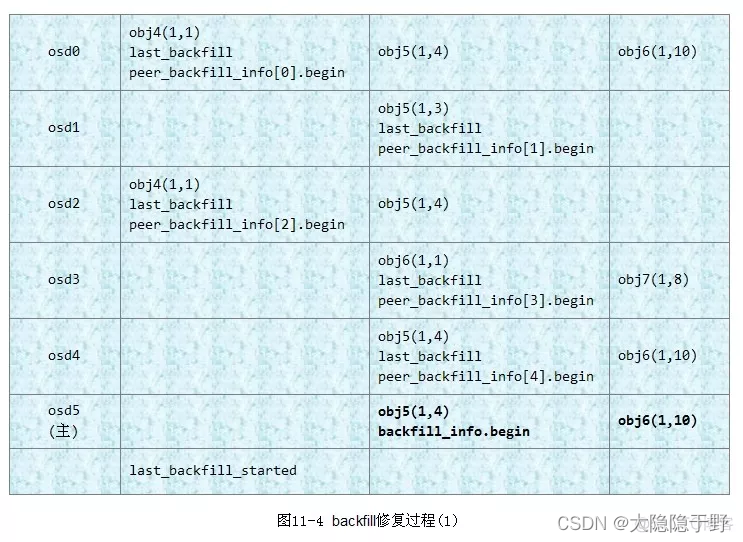
下面举例来说明步骤7中的不同的修复方法:
1) 当前check对象指针为主OSD上保存的peer_backfill_info中begin的最小值,图中check对象应该为obj4对象;
2) 比较check对象和主osd5上的backfill_info.begin对象,由于check小于obj5,所以obj4为多余的对象,所有拥有该check对象的OSD都必须删除该对象。故osd0和osd2上的obj4对象被删除,同时对应的begin指针前移。
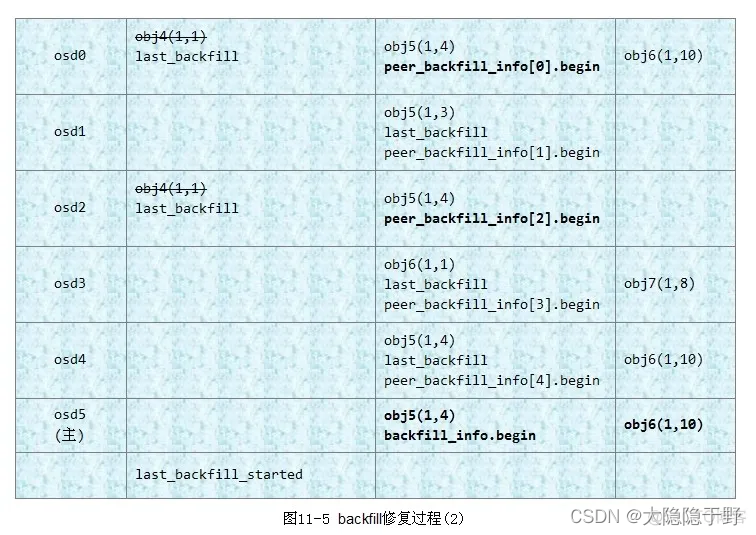
3) 当前各个OSD的状态如图11-5所示:此时check对象为obj5,比较check和backfill_info.begin的值:
a) 对于当前begin未check对象的osd0、osd1、osd4:
* 对于osd0和osd4,check对象he backfill_info.begin对象都是obj5,且版本号都为(1,4),加入到keep_ver.targs列表中,不需要修复;
* 对于osd1,版本号不一致,加入need_ver_targs列表中,需要修复
b) 对于当前begin不是check对象的osd2和osd3:
* 对于osd2,其last_backfill小于backfill_info.begin,显然对象obj5缺失,加入missing_targs修复;
* 对于osd3,其last_backfill大于backfill_info.begin,也就是说其已经修复到obj6了,obj5应该恢复了,加入skip_targs跳过;
4)步骤3处理完成,设置last_backfill_started为当前的backfill_info.begin的值。backfill_info.begin指针前移,所有begin等于check对象的begin指针前移,重复以上步骤继续修复。
函数update_range()调用函数scan_range()更新BackfillInterval修复的对象列表,同时检查上次扫描对象列表中,如果有对象发生写操作,就更新该对象修复的版本。
具体实现步骤如下:
1) bi->version记录了扫描要修复的对象列表时PG最新更新的版本号,一般设置为last_update_applied或者info.last_update的值。初始化时,bi->version默认设置为(0,0),所以小于info.log_tail,就更新bi->version的设置,调用函数scan_range()扫描对象。
2) 检查如果bi->version的值等于info.last_update,说明从上次扫描对象开始到当前时间,PG没有写操作,直接返回。
3) 如果bi->version的值小于info.last_update,说明PG有写操作,需要检查从bi->version到log_head这段日志中的对象:如果该对象有更新操作,修复时就修复最新的版本;如果该对象已经删除,就不需要修复,在修复队列中删除。
下面举例说明update_range()的处理过程:
例11-5 update_range的处理过程
日志记录如下图所示:

BackfillInterval的扫描的对象列表: bi->begin为对象obj1(1,3),bi->end为对象obj6(1,6),当前info.last_update为版本(1,6),所以bi->version设置为(1,6)。由于本次扫描的对象列表不一定能修复完,只能等下次修复。
2) 日志记录如下所示:
wds:图9
第二次进入函数recovery_backfill,此时begin对象指向了obj2对象。说明上次只完成了对象obj1的修复。继续修复时,期间有对象发生更新操作:
a) 对象obj3有些操作,版本更新为(1,7)。此时对象列表中要修复的对象obj3版本(1,5),需要更新为版本(1,7)的值。
b) 对象obj4发送删除操作,不需要修复了,所以需要从对象列表中删除。
综上所述可知,Ceph的Backfill过程是扫描OSD上该PG的所有对象列表,和主OSD做对比,修复不存在的或版本不一致的对象,同时删除多余的对象。
5. 小结
本章介绍了Ceph的数据修复的过程,有两个过程:Recovery过程和Backfill过程。Recovery过程根据missing记录,先完成主副本的修复,然后完成从副本的修复。对于不能通过日志修复的OSD,Backfill过程通过扫描各个部分上的对象来全量修复。整个Ceph的数据修复过程比较清晰,比较复杂的副本可能就是涉及快照对象的修复处理。
目前这部分代码时Ceph最核心的代码,除非必要,都不会轻易修改。目前社区也提出了修复时的一种优化方法。就是在日志里记录修改的对象范围,这样Recovery过程中不必拷贝整个对象来修复,只修复修改过的对象对应的范围即可,这样在某些情况下可以减少修复的数据量。
参考: https://ivanzz1001.github.io/records/post/ceph/2019/02/02/ceph-src-code-part11_1