3D激光里程计其三:点云畸变补偿
- 1. 产生原因
- 2. 补偿方法
Reference:
- 深蓝学院-多传感器融合
1. 产生原因
一帧点云:通常指雷达内部旋转一周扫描得到的点的集合。
优点:有足够数量的点云才能进行匹配,且一周正好是周围环境的完整采集。
缺点:每个激光点的坐标都是相对于雷达的,雷达运动时,不同激光点的坐标原点会不同。
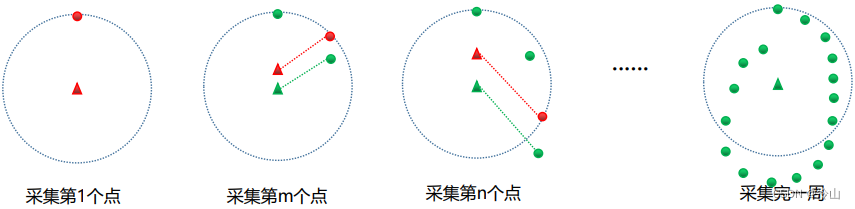
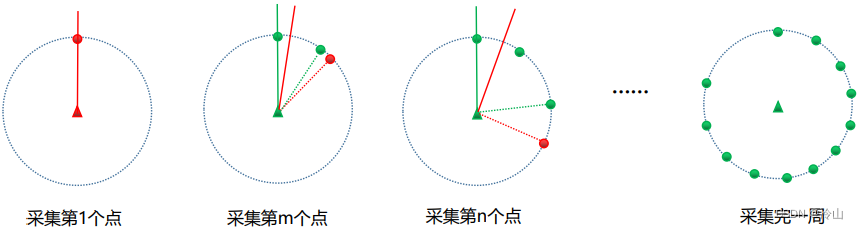
1)平移导致的畸变(转一圈是需要时间的,过程中雷达可能是运动的)
虚线圆圈为真实物体;红色点为激光束打到的位置;红色三角为当前采集时刻雷达的位置;
绿色三角为一帧的坐标原点;绿色点为一帧点云中激光点的坐标
2)旋转导致的畸变(如车辆转向时,采集到的一周并不完整)
假设雷达在顺时针旋转
红色实线为雷达0度坐标轴,绿色实线为一帧点云0度坐标轴
2. 补偿方法
对每个激光点坐标做补偿,补偿量为激光点原点(即当时雷达坐标)相对于该帧起始时刻的变化。
假设一帧点云中,起始时刻雷达的位姿为: T 0 = [ R 0 t 0 0 1 ] \begin{aligned} T_0 & =\left[\begin{array}{cc} R_0 & t_0 \\ 0 & 1 \end{array}\right] \end{aligned} T0=[R00t01]
第 𝑖 𝑖 i个激光点采集时,雷达的位姿为: T i = [ R i t i 0 1 ] \begin{aligned} T_i & =\left[\begin{array}{cc} R_i & t_i \\ 0 & 1 \end{array}\right] \end{aligned} Ti=[Ri0ti1]
第 𝑖 𝑖 i个激光点的坐标为: P i = [ p i x p i y p i z ] T P_i=[p_{ix}\quad p_{iy}\quad p_{iz}]^T Pi=[pixpiypiz]T
则第𝑖𝑖个激光点补偿畸变后的坐标应该为: P ˉ i = T 0 − 1 T i P i \bar{P}_i=T_0^{-1} T_i P_i Pˉi=T0−1TiPi
上式可以理解为,只需要计算0到 𝑖 𝑖 i时刻,激光雷达的相对旋转和相对平移变化即可。实际上,雷达点云是局部坐标系下的表示,当以0时刻雷达的位姿为基准坐标系时,此时 𝑇 0 𝑇_0 T0即为单位阵, 𝑇 𝑖 𝑇_𝑖 Ti即为0到 𝑖 𝑖 i时刻的相对旋转和平移。
此时有: R i = ω d t i m e , t i = V d t i m e R_i = \omega d_{time}, t_i = V d_{time} Ri=ωdtime,ti=Vdtime
即,只需要知道0到𝑖时刻的平均角速度和平均速度即可。