
须看原理图(引脚、电压值、ADC几号通道)配置 。
若对比值0~4096
模拟电压/参考电压=4096/x
假设模拟电压2.1V,参考电压3.3v,4096/x=3.3/2.1 ->3.3x=2.1x4096 ->x=2,606.5
也可反推出模拟电压
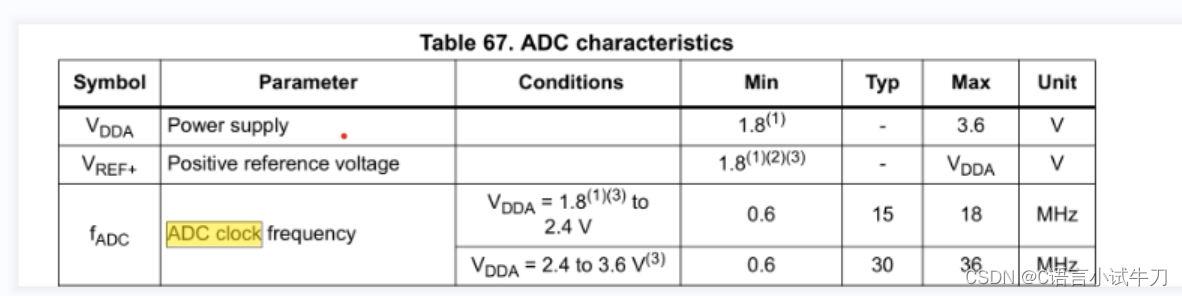
ADC转换时间
ADC时钟来源于ADC预分频器,时钟脉冲APB2,84MHZ,经过预分频得到,最大值为36MHZ,通常设置为21MHZ,可设置分频系数为2,4,6,8。
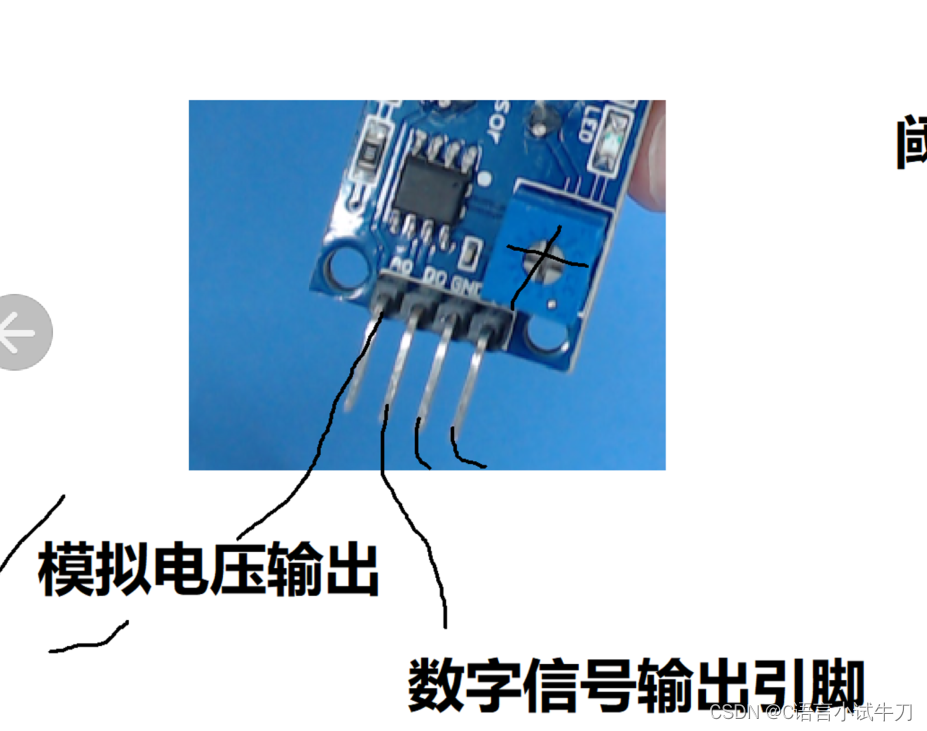
通过滑动电阻可调节数据,获取数据就可以调节pwm来改变硬件速度,判断等用途。
标准库源码
#include "myhead.h"
#include "adc.h"
#include "delay.h"
#include "usart.h"
void adc_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
ADC_CommonInitTypeDef ADC_CommonInitStructure;
//DMA_InitTypeDef DMA_InitStructure;
//1.时钟使能ADC1 GPIOA
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//1分频
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);//2分频
//2.将PA5引脚配置浮空 模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不需要上下拉电阻
GPIO_Init(GPIOA, &GPIO_InitStructure);
//3.ADC的公共部分配置
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式,双重模式,三重模式
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4; //84MHZ---/4 给到具体ADC 21MHZ<=36MHZ
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //多重ADC模式有关,一般独立ADC都不需要开启
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//多重ADC模式的采样间隔
ADC_CommonInit(&ADC_CommonInitStructure);
//4.指定ADC配置
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b; //精度选择
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //扫描模式选择 开扫描/关扫描 单个ADC开了多个通道才要扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //连续转换模式 开/关
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None; //
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_T1_CC1;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfConversion = 1; //待转换的通道数量 如果adc通道开多个(adc1,adc3),通道数量跟数量一样多,上面扫描模式就得开
ADC_Init(ADC1, &ADC_InitStructure);
//5.通道规则设置--设置adc通道的转换顺序
ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 1, ADC_SampleTime_3Cycles);//ADC_SampleTime_3Cycles通道转换速度,等级越高转换速度越快
//6.使能ADC模块
ADC_Cmd(ADC1,ENABLE);
}
int main(void)
{
adc_init();
usart1_init(9600);
ADC_SoftwareStartConv(ADC1);
while(1)
{
//3.3v/4096 =xV/ADC1->DR
printf("%.2fv\r\n",ADC1->DR*3.3/4095); //不断读取ADC1的转换结果 转换成电压值 (.2f表示double类型小数点后两位打印结果)
delay_ms(1000);
}
}