今天要讲的文章是关于如何创建距离配合和移动组件的API详解。
(1)创建配合API,CreateMate()

这个API的解释是根据指定的特性数据对象来创建配合,也就可以理解为输入什么样的特征对象就可以创建出什么配合,这个API的输入参数类型为object,返回的参数类型为Feature。
而输入参数的类型有以下几种:

(2)距离配合特征数据对象为
| IDistanceMateFeatureData |
这个特征对象中有几个比较常用的属性如下所示:
1、FlipDimension:bool类型,是否设置翻转维度。
2、MateAligment:int类型,翻译为对齐,具体值如下图所示:

3、Distance:double类型,距离配合值。
在使用距离配合时需要有一些注意的地方:
创建距离配合的时候,距离值不能输入负值,如果想要反向的话,可以把FlipDimension设置为true,这个设置就相当于Solidworks软件中距离值下方的反转尺寸打勾,也就实现了反向配合。我本人觉得这个功能设计的十分不便捷。
(3)创建移动组件的API,Transform2()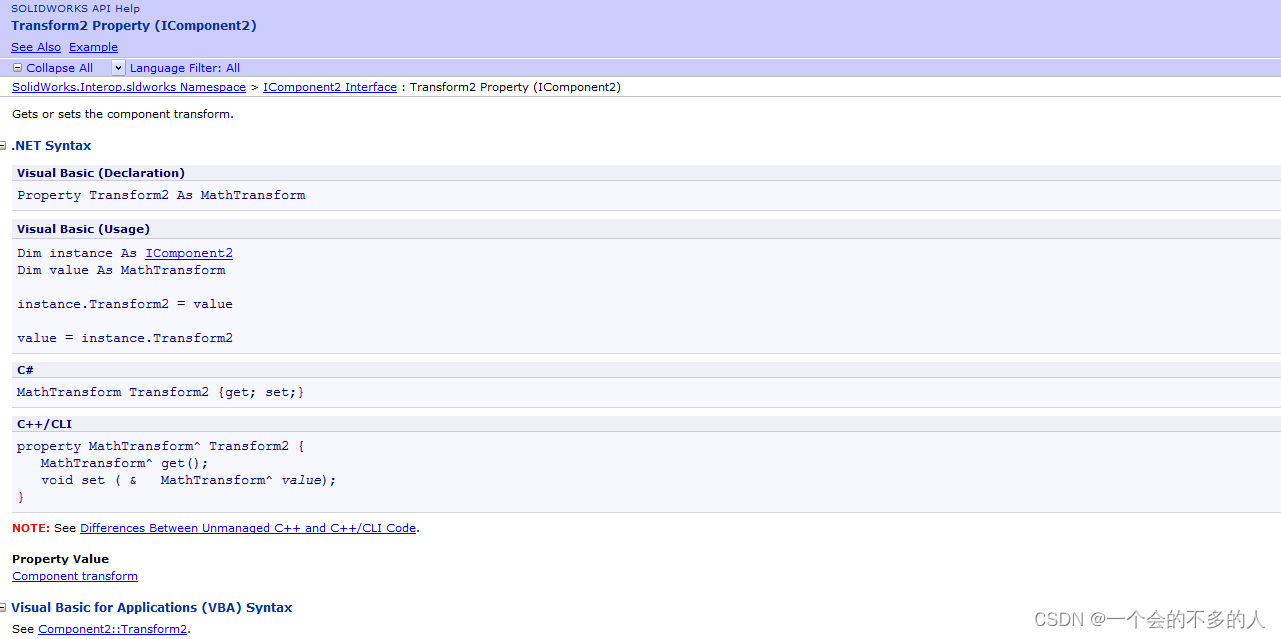
下面介绍一个使用的例子:
var swXfms = (double[])swComp1.Transform2.ArrayData;
swComp1.Select(true);
double[] TransformData = new double[16];
TransformData[0] = 1;
TransformData[1] = 0;
TransformData[2] = 0;
TransformData[3] = 0;
TransformData[4] = y;
TransformData[5] = 0;
TransformData[6] = 0;
TransformData[7] = 0;
TransformData[8] = 1;
TransformData[9] = totaldis;//X
TransformData[10] = 0;//Y
TransformData[11] = 0;//Z
TransformData[12] = 1;
TransformData[13] = 0;
TransformData[14] = 0;
TransformData[15] = 0;
var TransformDataVariant = TransformData;
var swMathUtil = (MathUtility)swApp.GetMathUtility();
var swTransform = (MathTransform)swMathUtil.CreateTransform((TransformDataVariant));
boolstatus = swComp1.SetTransformAndSolve2(swTransform);
今天要介绍的内容就这么多,总结有三点。
本篇文章到此结束,我们下篇文章再见。