总述
IMU即惯性测量单元,主要用于对机体的加速度与角速度的测算,使用场景很多,例如: 平衡车、惯性导航等等
姿态
姿态角(Euler angles)是用于描述物体在三维空间中的旋转姿态的一种表示方法。它由三个角度组成,通常表示物体绕三个轴(X轴、Y轴和Z轴)的旋转角度。姿态角可以用欧拉角(Euler angles)或者四元数(quaternions)来表示。

姿态角的计算
主要解算方法由卡尔曼滤波、互补滤波,也有IMU支持硬件的DMP结算。
开源计算库:MadgwickAHRS
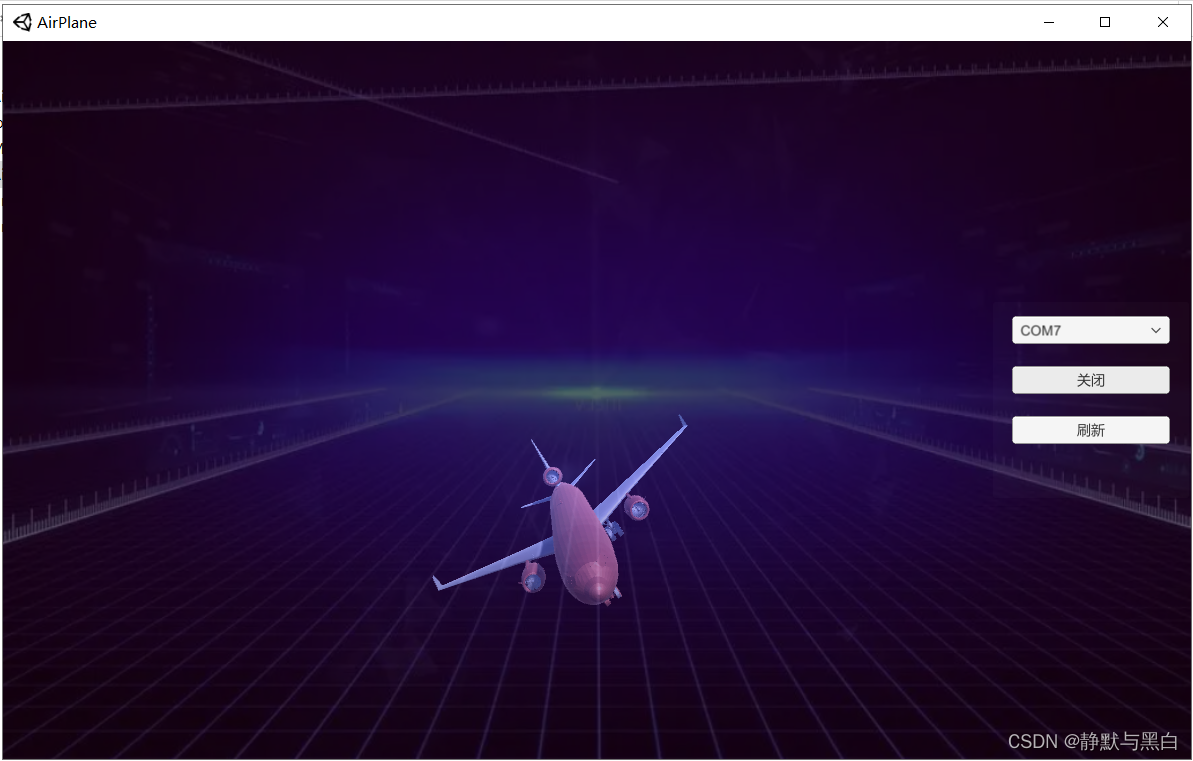
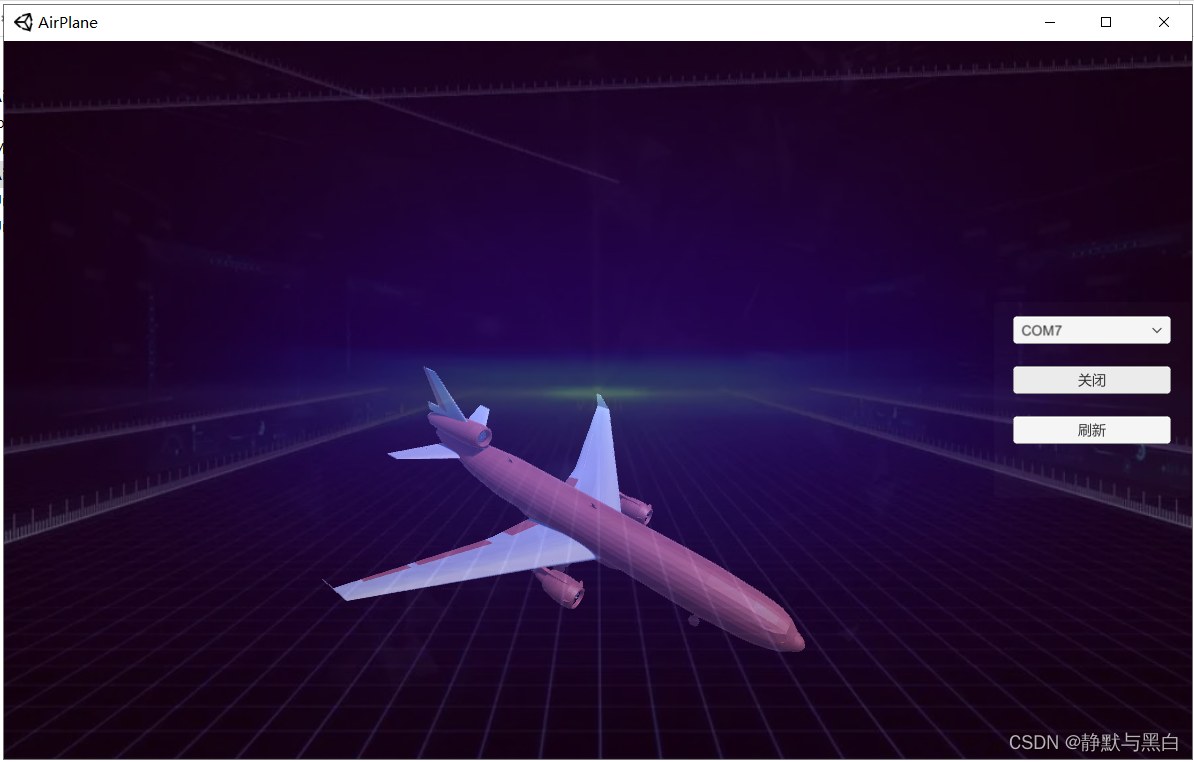
3D显示物体姿态
由于姿态角在3D控件更容易查看效果,顾需要一个上位机进行3D的显示,效果图如下:
获取
关注微信公众号 Chipcode, 发送IMU