整个YOLO系列的模型除了v1和v2比较古老没有实际项目应用过以外,从v3-v8或多或少都有实践,其中以v5使用频度最高,最早期刚接触YOLO的时候也是一通原理详解学习各种结构可视化,后面实际项目开发越来越多,对于前面的记忆就不多了,正好一个实际问题的需要,这里找时间梳理总结记录一下关于YOLOv5模型超参数相关的内容,梳理备忘,也希望帮到有需要的人。
下载官方YOLOv5项目后,在项目目录data/hyps/下存储着模型训练所需要的超参数配置文件,如下所示:
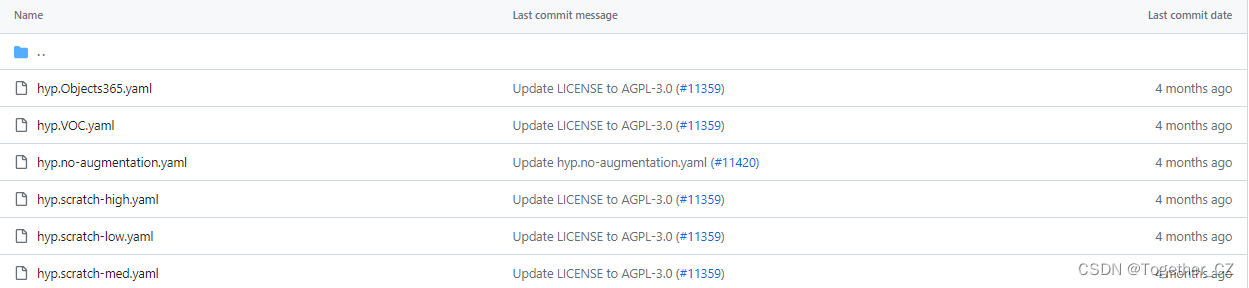
其中,一般性的模型开发使用hyp.scratch-low.yaml居多。
接下来来看下具体的超参数详情内容:
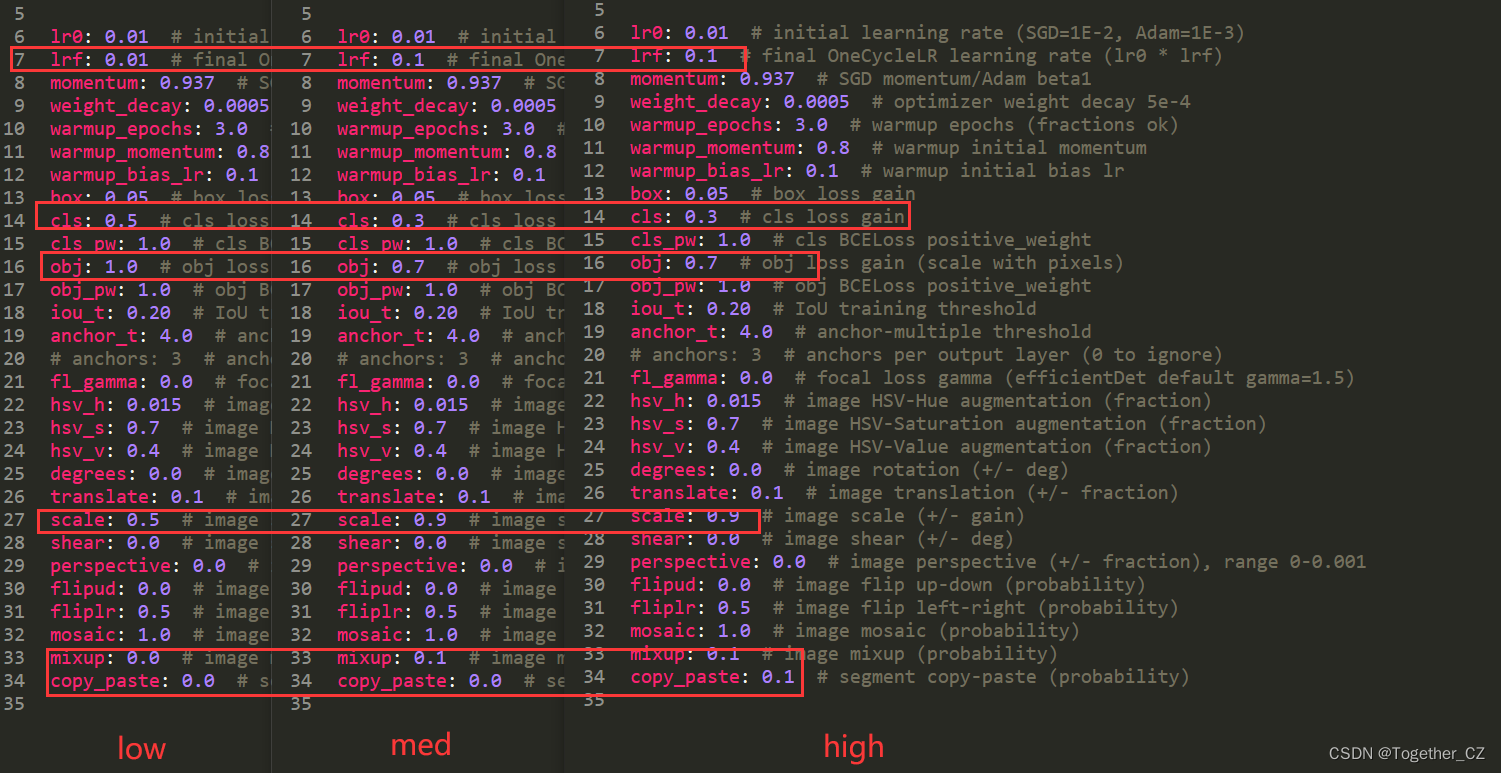
为了清晰直观地进行对比,我将low、med和high放在一张对比图上面,这样便于看到三者之间的区别,可以看到:三份配置文件也仅仅是在个别超参数的设定上面有区分而已,这样就清晰了,接下来就以low为例来详细看下对应超参数的含义。
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Hyperparameters for low-augmentation COCO training from scratch
# python train.py --batch 64 --cfg yolov5n6.yaml --weights '' --data coco.yaml --img 640 --epochs 300 --linear
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
"""
最初的学习率
学习率的初始值,通常使用SGD时为0.01,使用Adam时为0.001
"""
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
"""
最终学习率,或者可以说是最小的学习率【一般学习率调度器会随着epoch增加衰减的】
OneCycleLR 学习率调度器中的最终学习率(lr0 * lrf)
"""
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
"""
Momentum是为解决SGD中出现的曲折摆动问题,如图所示,“之”字形的上下摆动,降低了损失函数到达最低点的速度。
此情况下,若想减少摆动浮动,只能采用比较小的learning rate,这同样将导致寻优的速度较低。而Momentum就是为解决此问题而来。
动量可以理解为参数更新的惯性,类似于小球滚动的惯性。它通过维护一个动量向量,记录之前梯度方向的加权平均值,
并将其用于参数更新,可以加快训练速度,提高模型稳定性。
较小的动量可以使更新方向更加平稳
较大的动量可以加速参数更新。
"""
momentum: 0.937 # SGD momentum/Adam beta1
"""
权重衰减(weight decay)是一种常用的应对过拟合的方法,其等价于L2范数正则化(regularization)。
正则化通过为模型损失函数添加惩罚项使得学出的模型参数较小,通常接近于0。
权重衰减旨在减少模型的复杂性,防止过拟合。值越大,正则化强度越大,模型泛化能力会更好。但是太大会导致模型欠拟合。
"""
weight_decay: 0.0005 # optimizer weight decay 5e-4
"""
热身,让模型先热热身,熟悉熟悉数据,学习率要小,相当于只是去看看,还没正式训练呢,学习率太高说不定就学跑偏了。
在训练深度学习模型时,有时候需要先使用一个较小的学习率来进行预热,以避免在初始阶段出现不稳定的梯度或损失的情况。
warmup_epochs就是控制预热的epoch数,也就是在训练的前几个epoch使用较小的学习率,使得模型能够更快地收敛到稳定的状态。
在预热阶段结束后,学习率会逐渐增加到初始设定的学习率,然后继续按照设定的学习率进行训练。
"""
warmup_epochs: 3.0 # warmup epochs (fractions ok)
"""
与warmup_epochs相对应设定的参数,简单来说,就是热身训练那几个epochs的动量设置
"""
warmup_momentum: 0.8 # warmup initial momentum
"""
与warmup_epochs相对应设定的参数,指在学习率warm-up期间,偏置(bias)的学习率所使用的初始学习率。
在训练深度神经网络时,通常采用较小的学习率进行初始化,以便网络能够逐渐适应数据集的特征。
当学习率较小时,偏置的学习率通常要比权重的学习率更高,以保证网络在早期学习阶段能够更快地适应数据集的偏置。
"""
warmup_bias_lr: 0.1 # warmup initial bias lr
"""
box cls obj 这三者是YOLOv5中的三大损失
目标框损失权重
box通常指的是bounding box,即目标的边框。在yolov5中,是一个超参数,控制bounding box loss的权重。
它影响了网络如何调整检测边界框的位置和大小,以更好地匹配目标。
较大的box值将使网络更注重优化边界框。
较小的值将使其更加注重类别分类。
"""
box: 0.05 # box loss gain
"""
分类损失权重
在目标检测中,cls 通常表示分类损失。YoloV5中使用的是交叉熵损失,它度量的是目标属于每个类别的概率分布与实际分布之间的差异。
这个损失用于调整网络的权重,使网络能够更准确地预测目标的类别。
cls值越大,表示越注重分类损失的影响。
"""
cls: 0.5 # cls loss gain
"""
置信度损失权重
YOLOv5 模型的 obj 指代对象的存在损失权重,用于指定正负样本的权重。
这个权重被用来平衡正负样本对于训练的贡献,避免模型偏向于训练样本数较多的类别,从而提高模型的性能。
当该参数值较大时,模型对对象的存在的关注程度就会更高。
"""
obj: 1.0 # obj loss gain (scale with pixels)
"""
cls_pw、obj_pw 是主要用于调控正样本权重的超参数
分类损失的二元交叉熵BCE损失中正样本的权重
cls_pw就是用于控制分类损失函数中正样本权重的参数。
在某些情况下,数据集中的正负样本不平衡,导致分类损失函数中的负样本权重占比较大,这可能会导致模型对正样本的预测能力下降。
可以通过增加正样本的权重来平衡分类损失函数,从而提高模型对正样本的预测能力。
默认为1.0,表示正样本权重和负样本权重相等。
值设置的越大,则正样本权重越大。
"""
cls_pw: 1.0 # cls BCELoss positive_weight
"""
置信度损失的二元交叉熵BCE损失中正样本的权重
如果正样本数量较少,YOLOv5会增加正样本的权重,以便更多地关注正样本,提高检测准确率。
如果正样本数量较多,YOLOv5会减小正样本的权重,以便更多地关注负样本,减少误检率。
"""
obj_pw: 1.0 # obj BCELoss positive_weight
"""
Iou阈值,用于预测框和真实框之间的匹配。
IoU 是指检测框(预测框)和真实框之间的交并比。当预测框和真实框之间的 IoU 大于 iou_t 时,视为检测正确,否则视为检测错误。
比如,iuo_t设置为0.5,只有预测框和真实框之间的Iou大于0.5才会视为正确检测。
"""
iou_t: 0.20 # IoU training threshold
"""
在进行不同类型目标检测的时候可以适当调整这个参数,对于模型精准匹配和收敛会有帮助
比如:检测车辆对象就可以设置大点,检测安全帽、无人机这类对象就可以设置小点
anchor的阈值,用于筛选anchor。跟iou_t道理一样
这个参数就是控制哪些anchor boxes会被用来匹配目标。anchor_t越小,则越容易匹配更小的目标,anchor_t越大,则越容易匹配更大的目标
对于一些小的目标,因为它们的大小与anchor的大小差别较大,需要使用比较小的anchor box进行匹配,此时设置一个小的anchor_t可以让这些小目标更容易被匹配上。
而对于一些大目标,它们的大小与anchor大小的差别较小,可以使用相对较大的anchor进行匹配,此时设置一个大的anchor_t可以使得大目标更容易被匹配。
"""
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
"""
主要用于focalloss,fl_gamma 是 Focal Loss 中的一个参数,用于调整损失函数的加权。
fl_gamma 就是控制难以分类样本权重的参数,其值越大,模型对难以分类样本的关注程度越高,对易于分类的样本关注程度越低。
"""
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
"""
表示图像HSV颜色空间的增强参数。
hsv_h表示色调,取值范围都是[0, 1],可以尝试不同的取值来进行比较。值越大,强度越大
"""
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
"""
表示图像HSV颜色空间的增强参数。
hsv_s表示饱和度,取值范围都是[0, 1],可以尝试不同的取值来进行比较。值越大,强度越大
"""
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
"""
表示图像HSV颜色空间的增强参数。
hsv_v表示明度,取值范围都是[0, 1],可以尝试不同的取值来进行比较。值越大,强度越大
"""
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
"""
用于控制图像旋转的增强参数
数据增强的程度越大,可以提高模型的泛化能力,但也会增加训练时间和计算资源的消耗。
"""
degrees: 0.0 # image rotation (+/- deg)
"""
用于控制图像平移的增强参数
数据增强的程度越大,可以提高模型的泛化能力,但也会增加训练时间和计算资源的消耗。
"""
translate: 0.1 # image translation (+/- fraction)
"""
用于控制图像缩放的增强参数
数据增强的程度越大,可以提高模型的泛化能力,但也会增加训练时间和计算资源的消耗。
"""
scale: 0.5 # image scale (+/- gain)
"""
用于控制图像扭曲的增强参数
数据增强的程度越大,可以提高模型的泛化能力,但也会增加训练时间和计算资源的消耗。
"""
shear: 0.0 # image shear (+/- deg)
"""
是数据增强中的一种,它会对图像进行透视变换,使得图像看起来像是从不同的角度拍摄的。
透视变换可以改变图像中物体的形状和位置,因此能够增加模型的鲁棒性和泛化能力。
参数的值表示透视变换的程度,取值范围是0到0.001。
当值为0时,表示不进行透视变换。当值为0.001时,表示进行最大程度的透视变换。
通常情况下,可以将其设置为一个比较小的值,例如0.0005,以增加模型的泛化能力,同时不会对图像造成过大的扭曲。
"""
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
"""
用于控制图像上下翻转的增强概率
它们的取值范围是从 0 到 1,表示翻转的概率
flipud设置为 0.5 表示有 50% 的概率对图像进行上下翻转,设置为 0 表示不进行翻转,设置为 1 表示始终进行上下翻转
"""
flipud: 0.0 # image flip up-down (probability)
"""
用于控制图像左右翻转的增强概率
它们的取值范围是从 0 到 1,表示翻转的概率
fliplr设置为 0.5 表示有 50% 的概率对图像进行左右翻转,设置为 0 表示不进行翻转,设置为 1 表示始终进行左右翻转
"""
fliplr: 0.5 # image flip left-right (probability)
"""
用于控制数据增强的方式,可以用来增强训练集的多样性,从而提高模型的泛化性能。
以一定的概率将四张图片拼接成一张,增强了模型对多物体的感知能力和位置估计能力,取值一般在0.1~1.0之间
"""
mosaic: 1.0 # image mosaic (probability)
"""
用于控制数据增强的方式,可以用来增强训练集的多样性,从而提高模型的泛化性能。
mixup: 以一定的概率对两张图片进行线性混合,增强了模型对物体形状和纹理的学习能力,取值一般在0.0~0.5之间
"""
mixup: 0.0 # image mixup (probability)
"""
用于控制数据增强的方式,可以用来增强训练集的多样性,从而提高模型的泛化性能。
copy_paste: 以一定的概率将一张图片的一部分复制到另一张图片上,增强了模型对物体的位置和尺度变化的鲁棒性。
取值一般在0.0~0.5之间.这些取值表示概率,比如mosaic参数值为1,表示使用mosaic数据增强概率为100%,值为0.5则表示概率为50%
"""
copy_paste: 0.0 # segment copy-paste (probability)
总结记录一下!