原创 | 文 BFT机器人
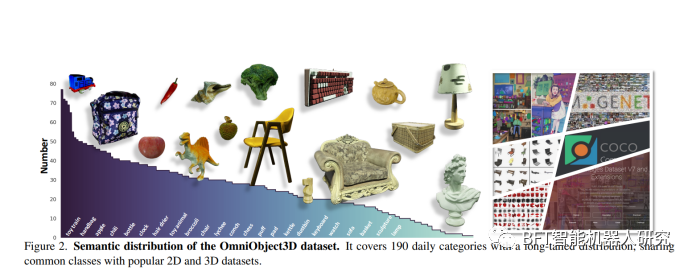
这篇论文的主要目标是介绍和探索OmniObject3D数据集,该数据集包含大量真实扫描的3D物体,涵盖了190个类别,提供了多种丰富的注释,包括纹理3D网格、采样点云、多视图图像等。作者将OmniObject3D应用于多个3D视觉任务,包括交叉场景的新视角合成、神经表面重建和3D物体生成,并通过实验展示了数据集在这些任务中的效果和应用。
01
OMNIOBJECT3D数据集
论文首先介绍了OmniObject3D数据集的构建和特点。该数据集包含大约6000个来自190个类别的3D物体,具有高质量的扫描和注释。数据集提供了多种类型的注释,如3D网格、点云、多视图图像等,为研究人员在多个3D视觉任务中提供了丰富的材料。
02
交叉场景新视觉合成实验
在这个实验中,作者将不同的新视角合成方法应用于OmniObject3D数据集,对比了pixelNeRF、IBRNet和MVSNeRF等方法在多个类别上的表现。实验结果表明,使用OmniObject3D训练的模型在测试集上表现良好,尽管未在测试类别上进行训练,这证实了数据集的泛化能力。
03
神经表面重建实验
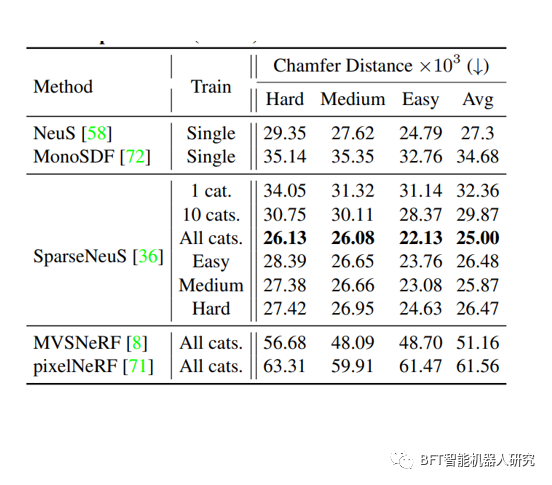
这个实验研究了从多视图图像进行表面重建的问题,分为密集视图和稀疏视图两种情况。作者评估了不同方法在不同情况下的性能,发现稀疏视图重建仍然是一个具有挑战性的问题。作者指出OmniObject3D数据集可以用于研究通用的表面重建方法和利用几何线索的策略。
04
3D物体生成实验
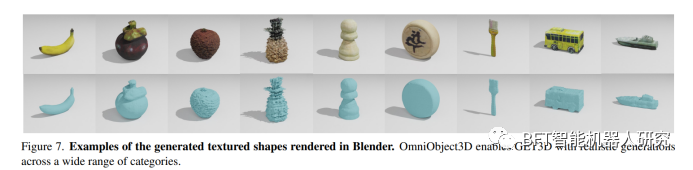
在这个实验中,作者使用GET3D生成模型进行3D物体生成,并对生成的形状的语义分布、多样性和质量进行了分析。结果显示,从OmniObject3D训练的生成模型面临着语义分布偏差和不同类别之间不同的生成难度等挑战。
05
总结与展望
论文总结了OmniObject3D数据集的贡献和潜力,强调了数据集的多样性和高质量,以及其在多个3D视觉任务中的应用价值。作者还强调了数据使用的社会影响和研究资金的重要性。
这篇论文引入了一个重要的3D物体数据集OmniObject3D,并通过多个实验展示了数据集在交叉场景新视角合成、神经表面重建和3D物体生成等任务中的应用。通过详细的实验和分析,论文展示了数据集的价值和优势,同时也揭示了在不同任务中的挑战和问题。
在交叉场景新视角合成实验中,论文展示了数据集的泛化能力,即使在没有进行特定类别训练的情况下,模型仍然能够在测试集上表现良好。这证明了数据集的多样性和广泛性对于泛化性能的提升至关重要。在神经表面重建实验中,作者发现稀疏视图的表面重建仍然是一个具有挑战性的问题,但是数据集可以为研究解决这一问题的通用方法提供有价值的资源。
在3D物体生成实验中,论文揭示了生成模型在不同类别和数据子集上的表现差异,以及生成过程中可能出现的语义分布偏差和生成难度变化。这为进一步研究生成模型的性能和稳定性提供了启示。
总的来说,这篇论文通过OmniObject3D数据集的介绍和多个实验,为3D视觉研究领域提供了有价值的资源和洞察,同时也提出了未来研究的方向和挑战。数据集的丰富性和多样性使其成为未来研究的重要工具,有望推动3D视觉技术的发展和应用。
作者 | 小财
排版 | 春花
审核 | 柒柒
若您对该文章内容有任何疑问,请于我们联系,将及时回应。如果想要了解更多的前沿资讯,记得点赞关注哦~



![[Agent]开发---ConversationalRetrievalAgent开发](https://img-blog.csdnimg.cn/79d2a97075d440ac978462ae36f7c4b9.png)