推荐阅读列表:
扩散模型实战(一):基本原理介绍
扩散模型实战(二):扩散模型的发展
扩散模型实战(三):扩散模型的应用
扩散模型实战(四):从零构建扩散模型
扩散模型实战(五):采样过程
之前的五篇文章主要是为了解释扩散模型的基本概念和流程,使读者更容易理解扩散模型的工作原理,但与实际工作中使用的模型差异较大,从本文开始,我们将初步使用DDPM模型的开源实现库Diffusers,在Diffusers库中DDPM模型的实现库是UNet2DModel
UNet2DModel模型实战
UNet2DModel模型比之前介绍的BasicUNet模型有一些改进,具体如下:
- 退化过程的处理方式不同,UNet2DModel通过调节时间步来调节噪声量,t作为一个额外参数被传入前向过程;
- 训练目标不同,UNet2DModel旨在预测不带缩放系数的噪声(也就是单位正太分布的噪声)而不是”去噪“的图像;
- UNet2DModel有更多的采样策略可供选择;
下面我们来看一下UNet2DModel的模型参数以及结构,代码如下:
model = UNet2DModel(sample_size=28, # 目标图像的分辨率in_channels=1, # 输入图像的通道数,RGB图像的通道数为3out_channels=1, # 输出图像的通道数layers_per_block=2, # 设置要在每一个UNet块中使用多少个ResNet层block_out_channels=(32, 64, 64), # 与BasicUNet模型的配置基本相同down_block_types=("DownBlock2D", # 标准的ResNet下采样模块"AttnDownBlock2D", # 带有空域维度self-att的ResNet下采样模块"AttnDownBlock2D",),up_block_types=("AttnUpBlock2D","AttnUpBlock2D", # 带有空域维度self-att的ResNet上采样模块"UpBlock2D", # 标准的ResNet上采样模块),)# 输出模型结构(看起来虽然冗长,但非常清晰)print(model)
我们继续来查看一下UNet2DModel模型的参数量,代码如下:
sum([p.numel() for p in model.parameters()])# UNet2DModel模型使用了大约170万个参数,BasicUNet模型则使用了30多万个参数
# 输出1707009
下面是我们使用UNet2DModel代替BasicUNet模型,重复前面展示的训练以及采样过程(这里t=0,以表明模型是在没有时间步的情况下训练的),完整的代码如下:
#@markdown Trying UNet2DModel instead of BasicUNet:# Dataloader (you can mess with batch size)batch_size = 128train_dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True)# How many runs through the data should we do?n_epochs = 3# Create the networknet = UNet2DModel(sample_size=28, # the target image resolutionin_channels=1, # the number of input channels, 3 for RGB imagesout_channels=1, # the number of output channelslayers_per_block=2, # how many ResNet layers to use per UNet blockblock_out_channels=(32, 64, 64), # Roughly matching our basic unet exampledown_block_types=("DownBlock2D", # a regular ResNet downsampling block"AttnDownBlock2D", # a ResNet downsampling block with spatial self-attention"AttnDownBlock2D",),up_block_types=("AttnUpBlock2D","AttnUpBlock2D", # a ResNet upsampling block with spatial self-attention"UpBlock2D", # a regular ResNet upsampling block),) #<<<net.to(device)# Our loss finctionloss_fn = nn.MSELoss()# The optimizeropt = torch.optim.Adam(net.parameters(), lr=1e-3)# Keeping a record of the losses for later viewinglosses = []# The training loopfor epoch in range(n_epochs):for x, y in train_dataloader:# Get some data and prepare the corrupted versionx = x.to(device) # Data on the GPUnoise_amount = torch.rand(x.shape[0]).to(device) # Pick random noise amountsnoisy_x = corrupt(x, noise_amount) # Create our noisy x# Get the model predictionpred = net(noisy_x, 0).sample #<<< Using timestep 0 always, adding .sample# Calculate the lossloss = loss_fn(pred, x) # How close is the output to the true 'clean' x?# Backprop and update the params:opt.zero_grad()loss.backward()opt.step()# Store the loss for laterlosses.append(loss.item())# Print our the average of the loss values for this epoch:avg_loss = sum(losses[-len(train_dataloader):])/len(train_dataloader)print(f'Finished epoch {epoch}. Average loss for this epoch: {avg_loss:05f}')# Plot losses and some samplesfig, axs = plt.subplots(1, 2, figsize=(12, 5))# Lossesaxs[0].plot(losses)axs[0].set_ylim(0, 0.1)axs[0].set_title('Loss over time')# Samplesn_steps = 40x = torch.rand(64, 1, 28, 28).to(device)for i in range(n_steps):noise_amount = torch.ones((x.shape[0], )).to(device) * (1-(i/n_steps)) # Starting high going lowwith torch.no_grad():pred = net(x, 0).samplemix_factor = 1/(n_steps - i)x = x*(1-mix_factor) + pred*mix_factoraxs[1].imshow(torchvision.utils.make_grid(x.detach().cpu(), nrow=8)[0].clip(0, 1), cmap='Greys')axs[1].set_title('Generated Samples');
# 输出Finished epoch 0. Average loss for this epoch: 0.020033Finished epoch 1. Average loss for this epoch: 0.013243Finished epoch 2. Average loss for this epoch: 0.011795

可以看出,比BasicUNet网络生成的结果要好一些。
DDPM原理
论文名称:《Denoising Diffusion Probabilistic Models》
论文地址:https://arxiv.org/pdf/2006.11239.pdf
下面是DDPM论文中的公式,Training步骤其实是退化过程,给原始图像逐渐添加噪声的过程,预测目标是拟合每个时间步的采样噪声。
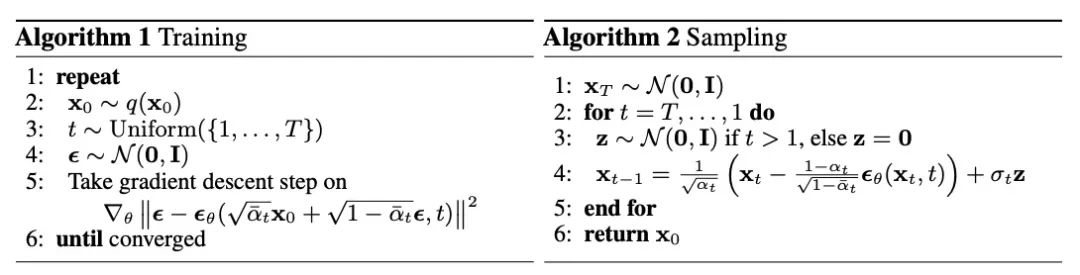
还有一点非常重要:我们都知道在前向过程中是不断添加噪声的,其实这个噪声的系数不是固定的,而是与时间t线性增加的(也成为扩散率),这样的好处是在后向过程开始过程先把"明显"的噪声给去除,对应着较大的扩散率;当去到一定程度,逐渐逼近真实真实图像的时候,去噪速率逐渐减慢,开始微调,也就是对应着较小的扩散率。
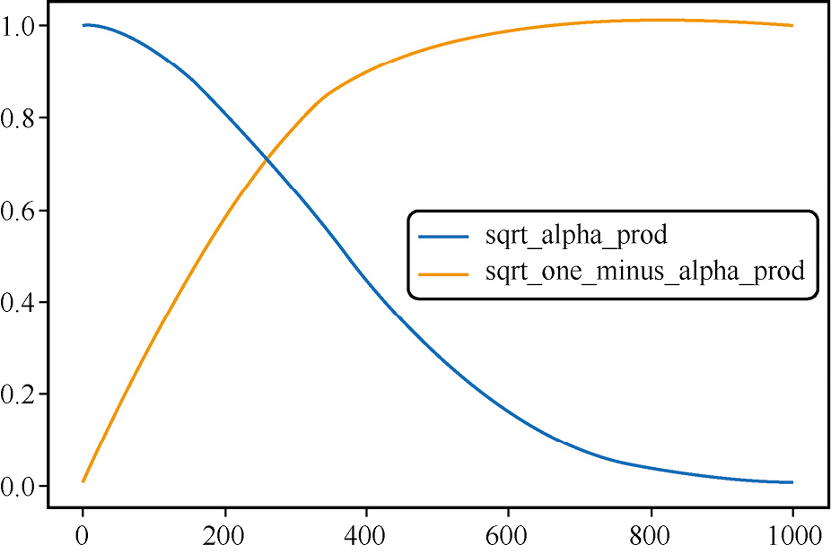
下面我们使用代码来看一下输入数据与噪声在不同迭代周期的变化:
noise_scheduler = DDPMScheduler(num_train_timesteps=1000)plt.plot(noise_scheduler.alphas_cumprod.cpu() ** 0.5, label=r"${\sqrt{\bar{\alpha}_t}}$")plt.plot((1 - noise_scheduler.alphas_cumprod.cpu()) ** 0.5,label=r"$\sqrt{(1 - \bar{\alpha}_t)}$")plt.legend(fontsize="x-large");
生成的结果,如下图所示:
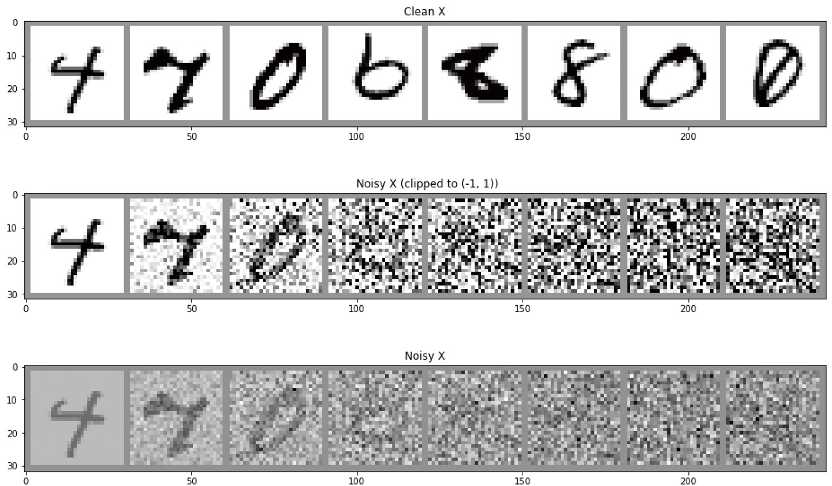
下面我们来看一下,噪声系数不变与DDPM中的噪声方式在MNIST数据集上的加噪效果:
# 可视化:DDPM加噪过程中的不同时间步# 对一批图片加噪,看看效果fig, axs = plt.subplots(3, 1, figsize=(16, 10))xb, yb = next(iter(train_dataloader))xb = xb.to(device)[:8]xb = xb * 2. - 1. # 映射到(-1,1)print('X shape', xb.shape)# 展示干净的原始输入axs[0].imshow(torchvision.utils.make_grid(xb[:8])[0].detach().cpu(), cmap='Greys')axs[0].set_title('Clean X')# 使用调度器加噪timesteps = torch.linspace(0, 999, 8).long().to(device)noise = torch.randn_like(xb) # <<注意是使用randn而不是randnoisy_xb = noise_scheduler.add_noise(xb, noise, timesteps)print('Noisy X shape', noisy_xb.shape)# 展示“带噪”版本(使用或不使用截断函数clipping)axs[1].imshow(torchvision.utils.make_grid(noisy_xb[:8])[0].detach().cpu().clip(-1, 1), cmap='Greys')axs[1].set_title('Noisy X (clipped to (-1, 1))')axs[2].imshow(torchvision.utils.make_grid(noisy_xb[:8])[0].detach().cpu(), cmap='Greys')axs[2].set_title('Noisy X');X shape torch.Size([8, 1, 28, 28])Noisy X shape torch.Size([8, 1, 28, 28])
结果如下图所示:
采样补充
采样在扩散模型中扮演非常重要的角色,我们可以输入纯噪声,然后期待模型能一步输出不带噪声的图像吗?根据前面的所学内容,这显然行不通。那么针对采样会有哪些改进的思路呢?
- 可以使用模型多预测几次,以通过估计一个更高阶的梯度来更新得到更准确的结果(更高阶的方法和一些离散的ODE处理器);
- 保留一些历史的预测值来尝试指导当前步的更新。








![java八股文面试[JVM]——JVM内存结构2](https://img-blog.csdnimg.cn/337de420415c4aa8b1347b5cd9dee5a3.png)