沐神版《动手学深度学习》学习笔记,记录学习过程,详细的内容请大家购买书籍查阅。
b站视频链接
开源教程链接
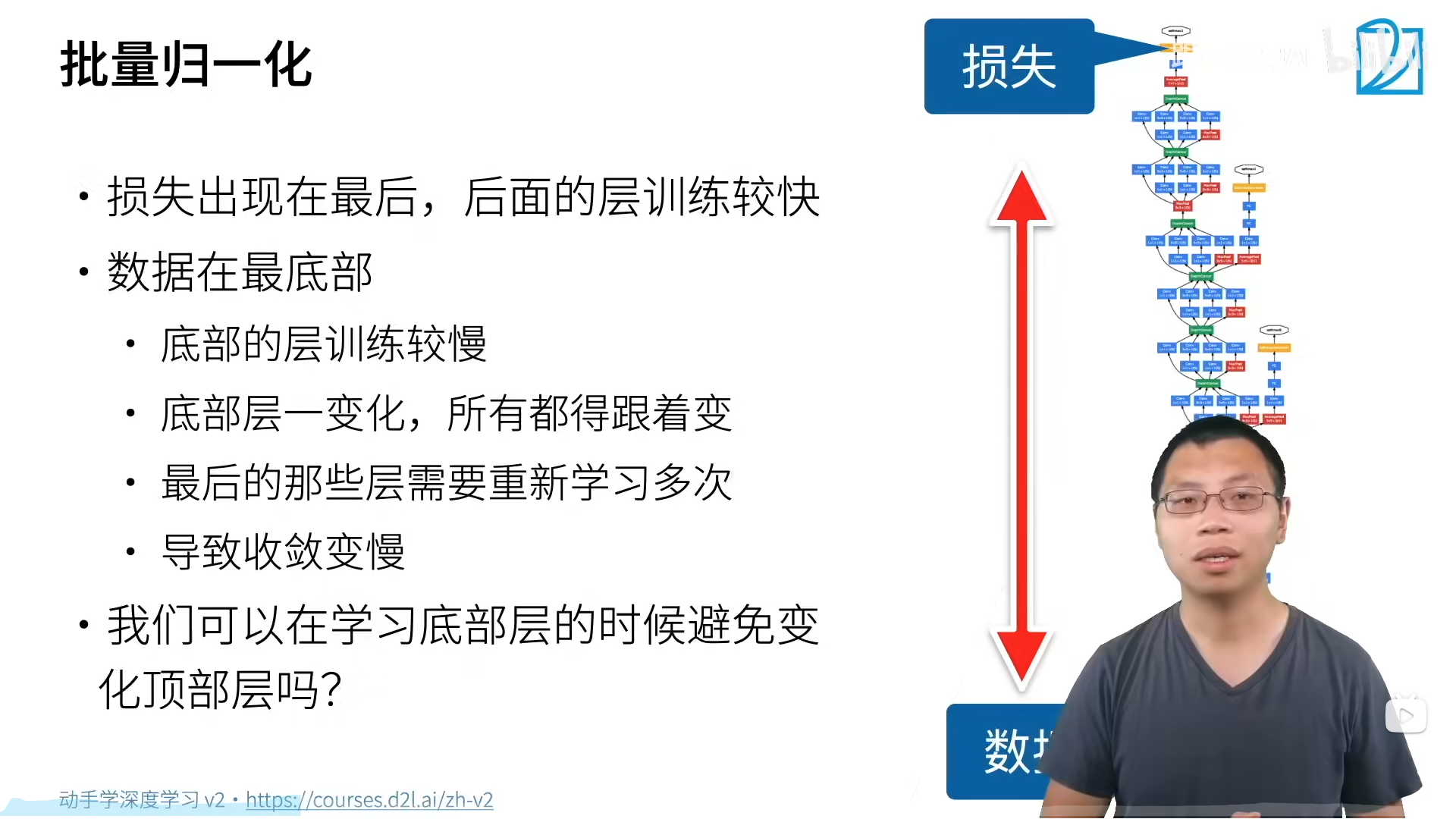
批量归一化

将参数的量级进行统一,使得深度神经网络更好收敛:
γ
\gamma
γ和
β
\beta
β是可学习的参数:
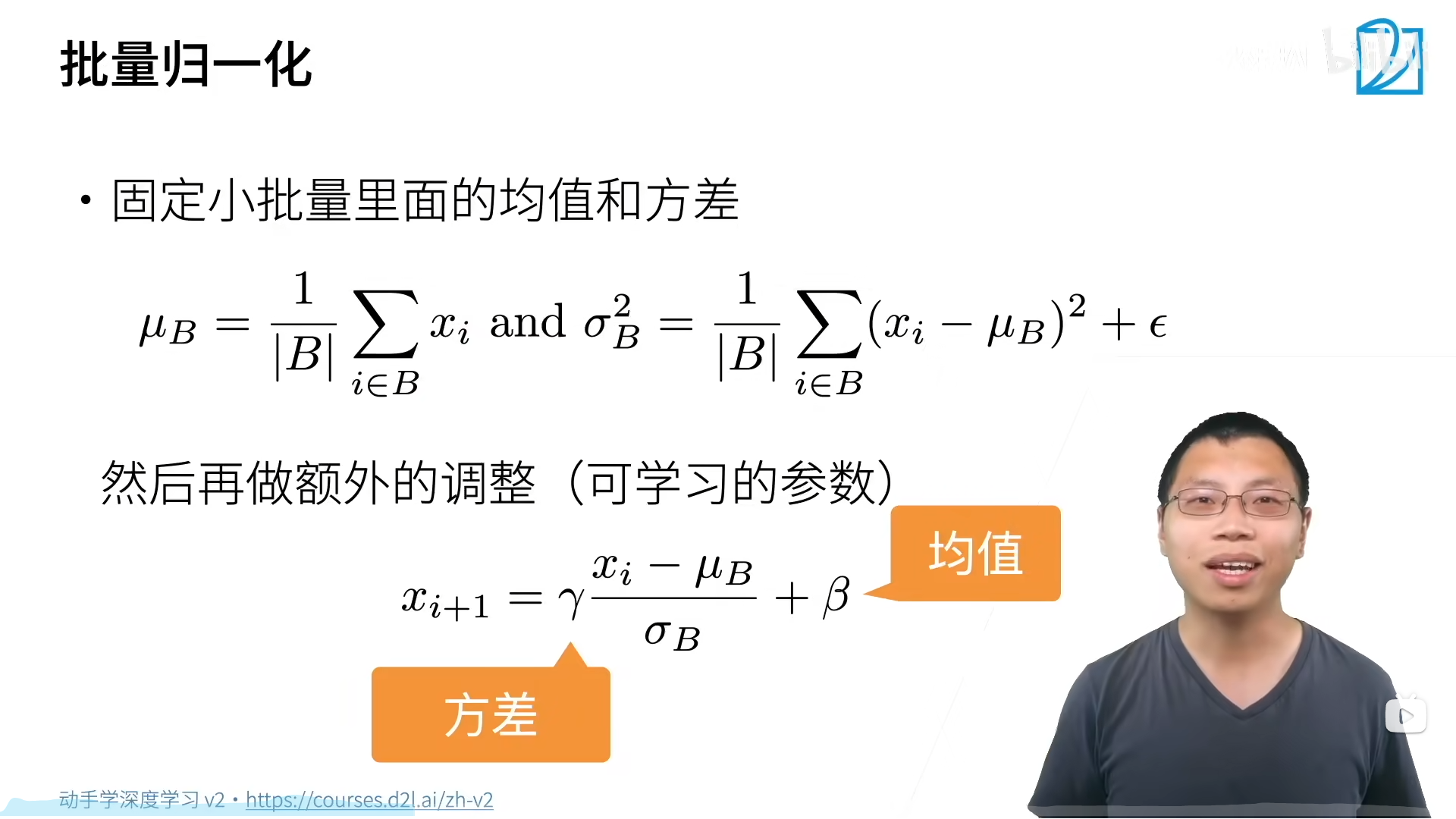
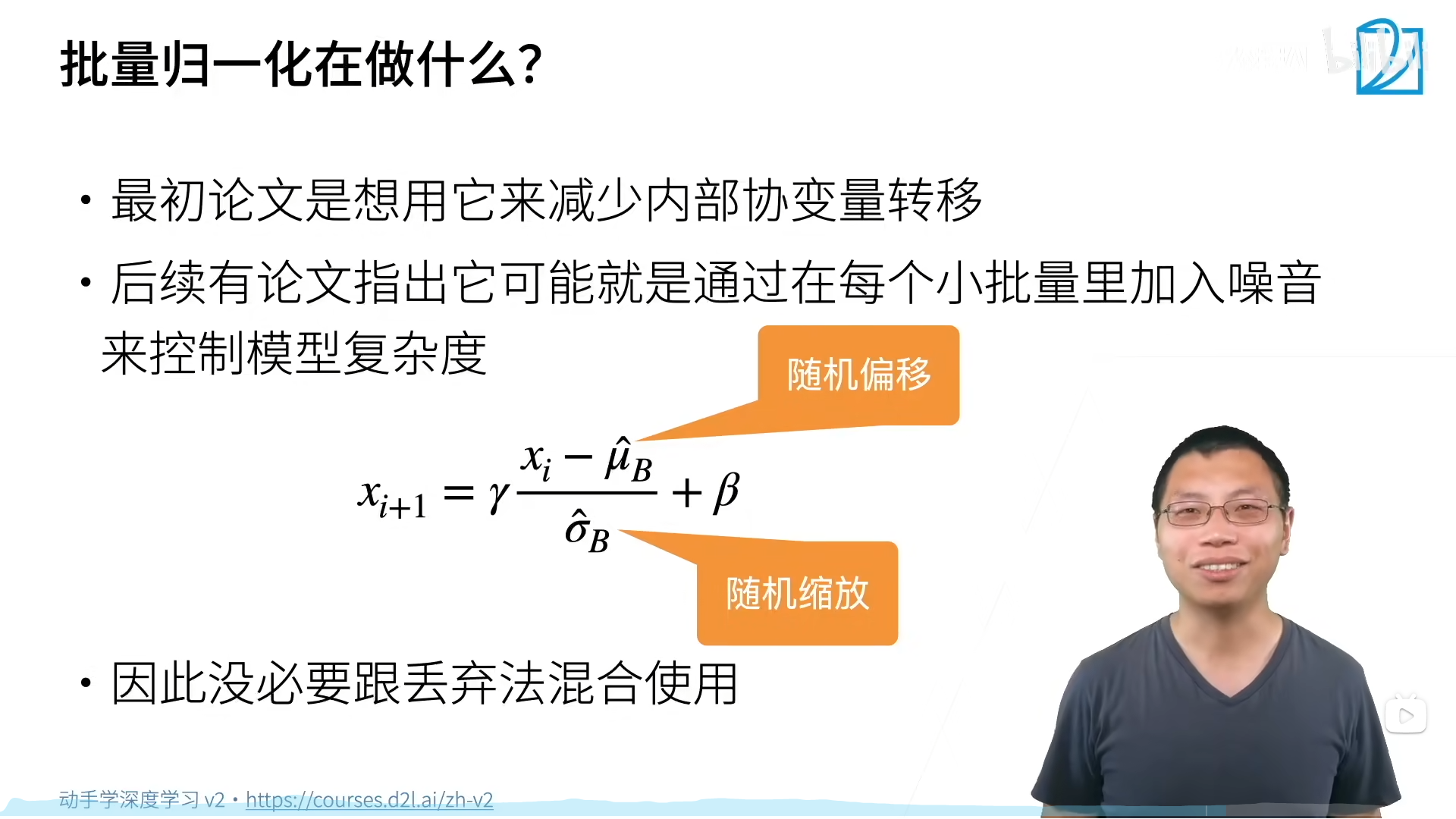
批量归一化是一个线性变换,目的就是将方差和均值拉的比较好,使得变化不那么剧烈。
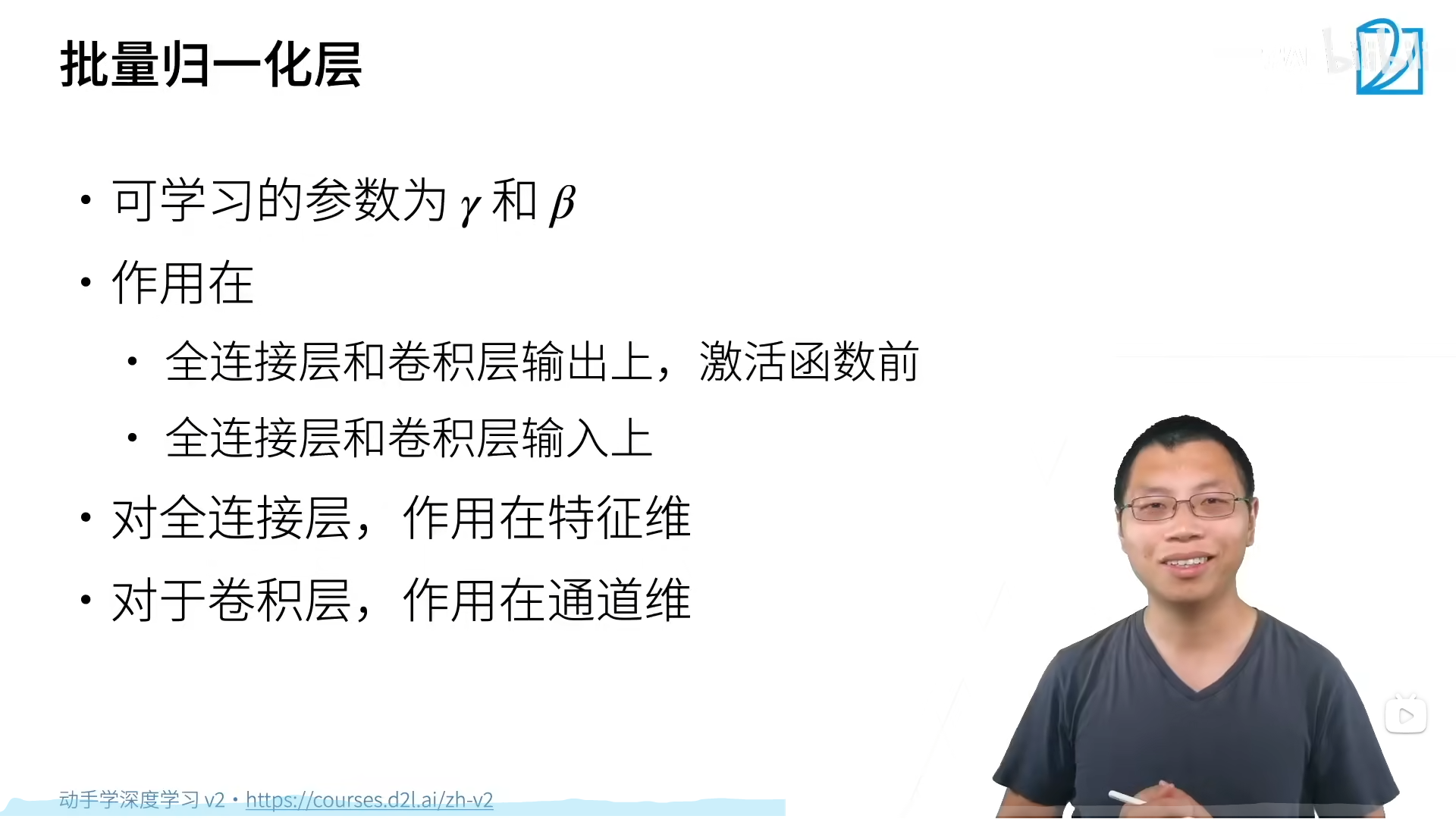
对全连接层,对于每一个特征做一个标量的均值,标量的方差,区别在于不是仅仅对数据做操作,而是对参数也作用。
对卷积层,作用在通道层,卷积的多通道相当于像素的特征。
批量归一化可能是通过在每个小批量中加入噪音来控制模型复杂度,
因此没有必要跟
d
r
o
p
o
u
t
dropout
dropout一起使用:
总结
B
a
t
c
h
N
o
r
m
BatchNorm
BatchNorm可以被用来加速收敛,用了批量归一化后学习率可以调的比较大,但一般不改变模型精度(更好训练)。
动手学
从零实现BatchNorm
import torch
from torch import nn
from d2l import torch as d2l
def batch_norm(X, gamma, beta, moving_mean, moving_var, eps, momentum): # moving_mean和moving_var是全局的均值和方差,推理时使用,momentum用来更新前面两个值
# 通过is_grad_enabled来判断当前模式是训练模式还是预测模式
if not torch.is_grad_enabled(): # 推理
# 如果是在预测模式下,直接使用传入的移动平均所得的均值和方差
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps) # 推理时不一定是一个批量
else:
assert len(X.shape) in (2, 4) # 全连接层和卷积层
if len(X.shape) == 2:
# 使用全连接层的情况,计算特征维上的均值和方差
mean = X.mean(dim=0) # 按行求均值,为每一列求一个均值
var = ((X - mean) ** 2).mean(dim=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。
# 这里我们需要保持X的形状以便后面可以做广播运算
mean = X.mean(dim=(0, 2, 3), keepdim=True)
var = ((X - mean) ** 2).mean(dim=(0, 2, 3), keepdim=True)
# 训练模式下,用当前的均值和方差做标准化
X_hat = (X - mean) / torch.sqrt(var + eps)
# 更新移动平均的均值和方差
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean # 逼近真实的均值和方差
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 缩放和移位
return Y, moving_mean.data, moving_var.data
X = torch.tensor([[[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]],
[[1.0, 2.0, 3.0], [4.0, 5.0, 6.0], [7.0, 8.0, 9.0]]],[[[1,2,3],[2,3,1],[1,2,3]],[[1,2,3],[2,4,2],[1,2,3]]]])
print(X)
X.mean(dim=(0, 2, 3), keepdim=True)
tensor([[[[0., 1., 2.],
[3., 4., 5.],
[6., 7., 8.]],
[[1., 2., 3.],
[4., 5., 6.],
[7., 8., 9.]]],
[[[1., 2., 3.],
[2., 3., 1.],
[1., 2., 3.]],
[[1., 2., 3.],
[2., 4., 2.],
[1., 2., 3.]]]])
tensor([[[[3.0000]],
[[3.6111]]]])
BatchNorm层:
class BatchNorm(nn.Module):
# num_features:完全连接层的输出数量或卷积层的输出通道数。
# num_dims:2表示完全连接层,4表示卷积层
def __init__(self, num_features, num_dims):
super().__init__()
if num_dims == 2:
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# 参与求梯度和迭代的拉伸和偏移参数,分别初始化成1和0
self.gamma = nn.Parameter(torch.ones(shape))
self.beta = nn.Parameter(torch.zeros(shape))
# 非模型参数的变量初始化为0和1
self.moving_mean = torch.zeros(shape)
self.moving_var = torch.ones(shape)
def forward(self, X):
# 如果X不在内存上,将moving_mean和moving_var
# 复制到X所在显存上
if self.moving_mean.device != X.device:
self.moving_mean = self.moving_mean.to(X.device)
self.moving_var = self.moving_var.to(X.device)
# 保存更新过的moving_mean和moving_var
Y, self.moving_mean, self.moving_var = batch_norm(
X, self.gamma, self.beta, self.moving_mean,
self.moving_var, eps=1e-5, momentum=0.9)
return Y
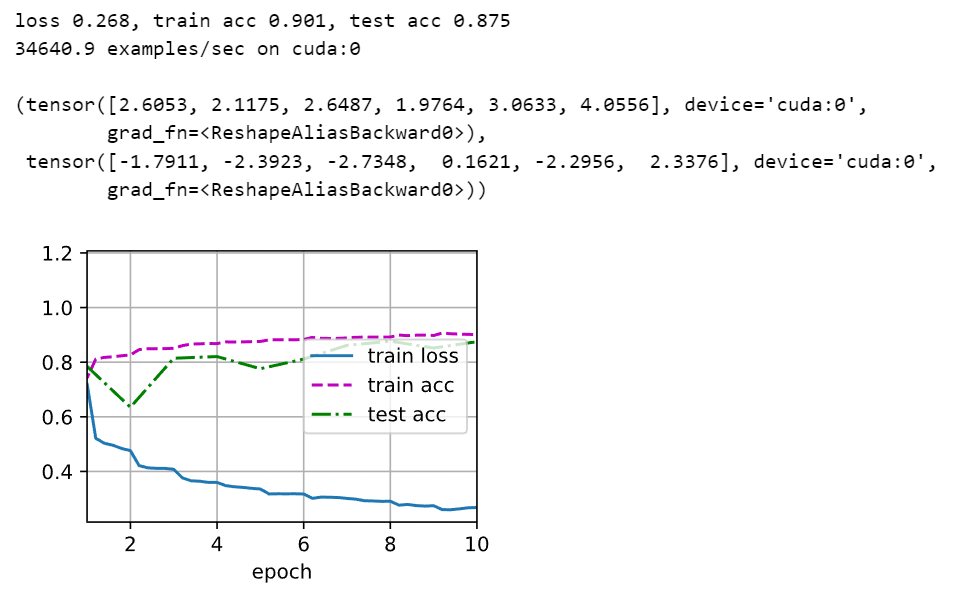
使用批量归一化的LeNet
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), BatchNorm(6, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), BatchNorm(16, num_dims=4), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(16*4*4, 120), BatchNorm(120, num_dims=2), nn.Sigmoid(),
nn.Linear(120, 84), BatchNorm(84, num_dims=2), nn.Sigmoid(),
nn.Linear(84, 10))
lr, num_epochs, batch_size = 1.0, 10, 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
net[1].gamma.reshape((-1,)), net[1].beta.reshape((-1,))
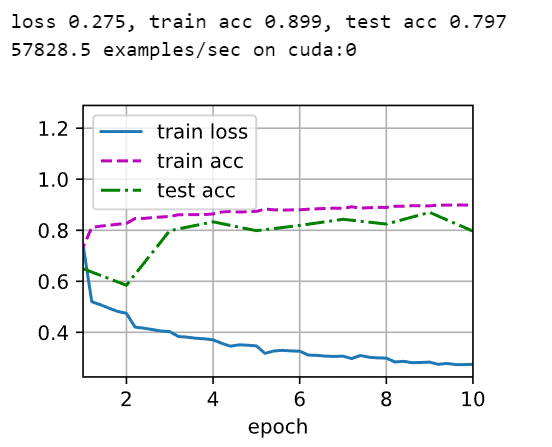
简明实现
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5), nn.BatchNorm2d(6), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.BatchNorm2d(16), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), nn.Flatten(),
nn.Linear(256, 120), nn.BatchNorm1d(120), nn.Sigmoid(),
nn.Linear(120, 84), nn.BatchNorm1d(84), nn.Sigmoid(),
nn.Linear(84, 10))
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())


![java八股文面试[数据结构]——集合框架](https://img-blog.csdnimg.cn/img_convert/747a3b43849867e4e80aef6691ef69d8.png)