你准备参加一场远足活动。给你一个二维 rows x columns 的地图 heights ,其中 heights[row][col] 表示格子 (row, col) 的高度。一开始你在最左上角的格子 (0, 0) ,且你希望去最右下角的格子 (rows-1, columns-1) (注意下标从 0 开始编号)。你每次可以往 上,下,左,右 四个方向之一移动,你想要找到耗费 体力 最小的一条路径。
一条路径耗费的 体力值 是路径上相邻格子之间 高度差绝对值 的 最大值 决定的。
请你返回从左上角走到右下角的最小 体力消耗值 。
示例 1:

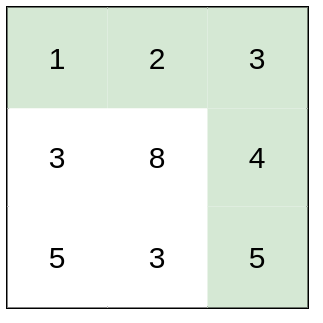
输入:heights = [[1,2,2],[3,8,2],[5,3,5]] 输出:2 解释:路径 [1,3,5,3,5] 连续格子的差值绝对值最大为 2 。 这条路径比路径 [1,2,2,2,5] 更优,因为另一条路径差值最大值为 3 。
示例 2:
输入:heights = [[1,2,3],[3,8,4],[5,3,5]] 输出:1 解释:路径 [1,2,3,4,5] 的相邻格子差值绝对值最大为 1 ,比路径 [1,3,5,3,5] 更优。
示例 3:
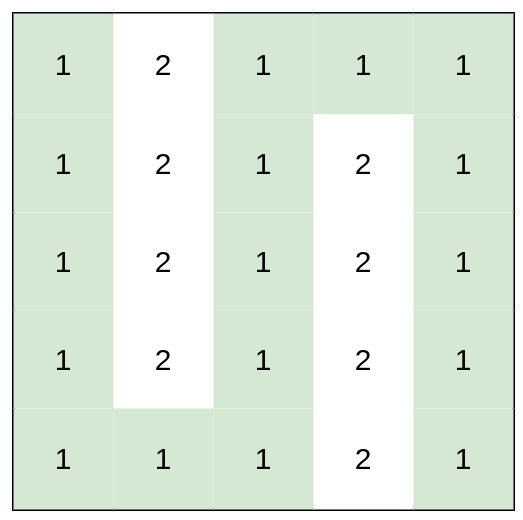
输入:heights = [[1,2,1,1,1],[1,2,1,2,1],[1,2,1,2,1],[1,2,1,2,1],[1,1,1,2,1]] 输出:0 解释:上图所示路径不需要消耗任何体力。
提示:
rows == heights.lengthcolumns == heights[i].length1 <= rows, columns <= 1001 <= heights[i][j] <= 106
int minimumEffortPath(vector<vector<int>>& heights)
{
int r = heights.size();
int c = heights[0].size();
vector<int> x{ -1,1,0,0 };
vector<int> y{ 0,0,-1,1 };
//最小值先出队
auto tupleCmp = [](const auto& e1, const auto& e2) {
return get<2>(e1) > get<2>(e2);
};
priority_queue<tuple<int, int, int>, vector<tuple<int, int, int>>, decltype(tupleCmp)> que(tupleCmp);
que.emplace(0, 0, 0);
vector<vector<bool>>visited(r+1, vector<bool>(c + 1, false));
vector<int>ret(r *c+1, INT32_MAX);
ret[0] = 0;
while (!que.empty())
{
auto item = que.top();
std::cout << get<2>(item) << std::endl;
if (get<0>(item) == r - 1 && get<1>(item) == c - 1)
{
break;
}
que.pop();
int row = get<0>(item);
int col = get<1>(item);
if (visited[row][col] == true)
{
continue;
}
visited[row][col] = true;
for (int i = 0; i < 4; i++)
{
if (row + x[i] < 0 || col + y[i] < 0 || row + x[i] >= heights.size()
|| col + y[i] >= heights[0].size())
{
continue;
}
int tmp = std::max(get<2>(item), abs(heights[row + x[i]][col + y[i]] - heights[row][col]));//保存之前最大值,get<2>(item)
if (tmp < ret[(row + x[i])*c + col + y[i]])
{
ret[(row + x[i])*c + col + y[i]] = tmp;
que.emplace(row + x[i], col + y[i], tmp);
}
}
}
return ret[r*c-1];
}






![Java IO流(四)Netty理论[模型|核心组件]](https://img-blog.csdnimg.cn/19e6ae2d19994e52ab414afd97144c2b.png)

![[docker][WARNING]: Empty continuation line found in:](https://img-blog.csdnimg.cn/7fbcd528bf0a45a5b718f663588caf9f.png)